一、介绍

MuJoCo 是Multi-Joint dynamics with Contact 的缩写,字面意思可拆解为带接触的多关节动力学。 是DeepMind(谷歌旗下)维护的高精度多体动力学物理仿真引擎,专为机器人、机械控制、强化学习(RL)、生物力学等领域设计,核心优势是「精准的接触动力学」「高效的数值求解」「灵活的场景定义」,是目前科研和工业界公认的顶级物理仿真工具之一。
二、前期准备
使用语言分类:
1、C++版本
1.1、通过源码编译:
bash
git clone https://github.com/google-deepmind/mujoco.git下载下来通过Cmake构建,即可;
构建会如下提示一直构建不过去:
bash
[cmake] cmake/MujocoDependencies.cmake:137 (findorfetch)
[cmake] CMakeLists.txt:83 (include)
[cmake] This warning is for project developers. Use -Wno-dev to suppress it.此时只需要将
bash
// 将这行放到83行之前,就可以构建成功
set(CMAKE_SUPPRESS_DEVELOPER_WARNINGS ON CACHE BOOL "Suppress CMake developer warnings" FORCE)
1.2、直接官网下载编译完成的包

2、python版本
安装:
python
pip install mujoco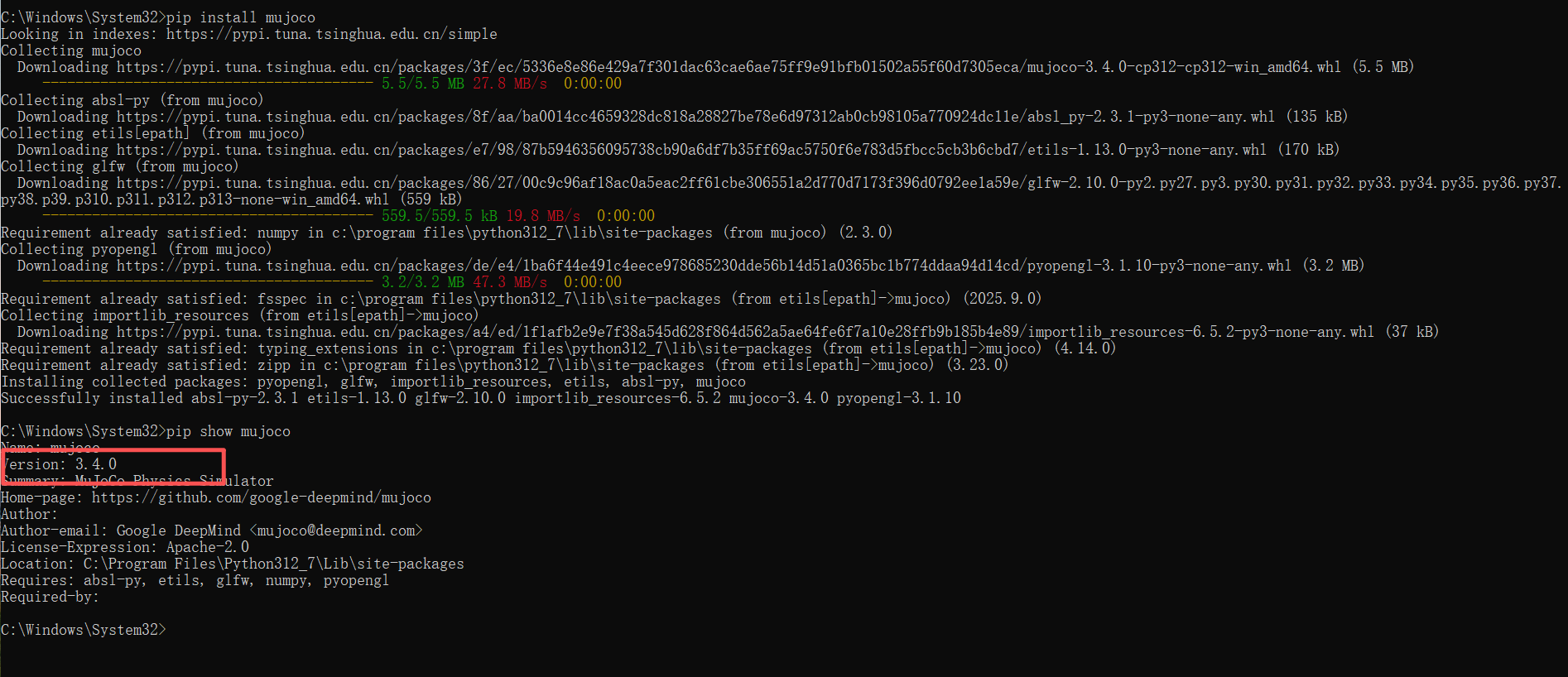
测试安装结果:
python
python -m mujoco.viewer // 查看是否有模拟器出现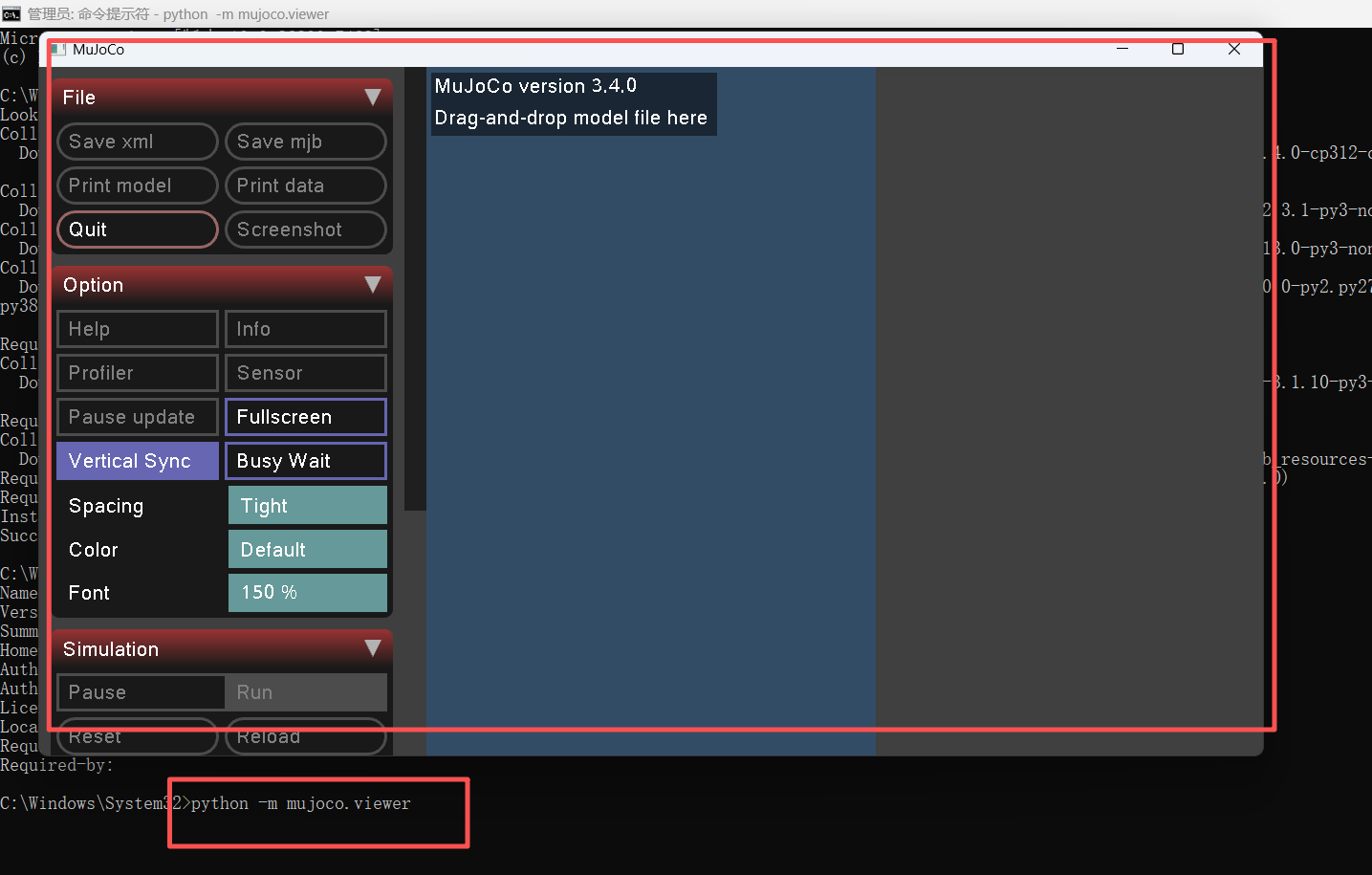
运行模型:
python
python -m mujoco.viewer --mjcf=E:\study\mujoco-3.4.0\model\humanoid/humanoid.xml
三、仿真器
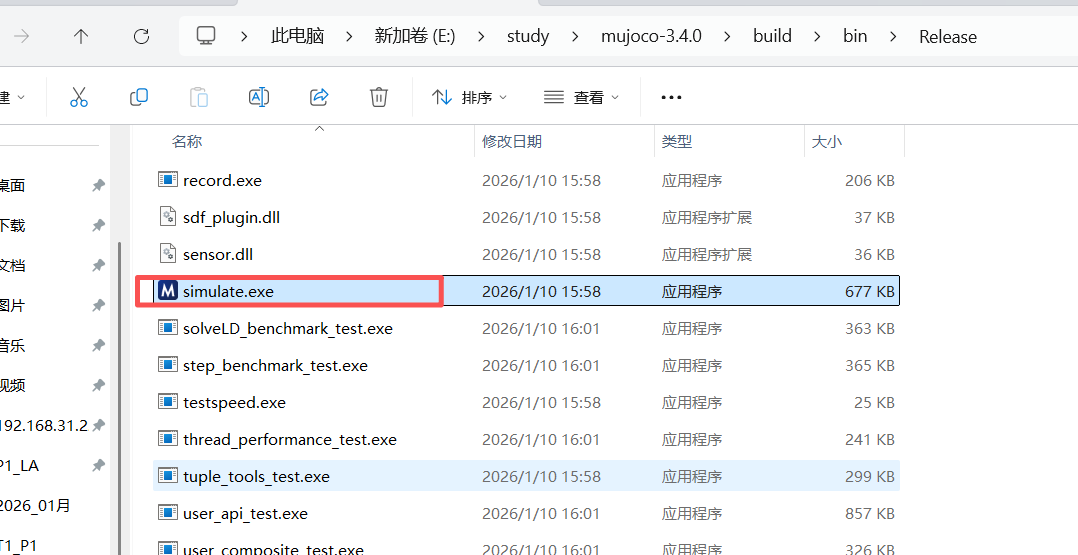
C++编译完成后会有一个仿真程序:simulate.exe
1、使用方式
1.1 、命令直接加上模型路径
bash
simulate.exe [模型文件路径]
1.2、直接将模型文件拖拽到simulate中
2、常见操作
(1)、双击选中物体,高亮显示;
(2)、双击选中物体,按住ctrl+鼠标左键调整姿态;
(3)、双击选中物体,按住ctrl+鼠标右键在选中的位置施加一个力;
(4)、+和-是仿真世界的时间流逝速度;
(5)、ctrl+A相机视角回正;
(6)、常见快捷键,F1:帮助, F2:显示资源占比,F6:显示坐标系。。。。