Ubuntu18.04 D435i RGB相机与IMU标定详细版(四)
主要介绍使用张正友相机标定方法
一、标定RGB相机-张正友相机标定方法
(1)发布相机话题
c
roslaunch realsense2_camera rs_camera.launch color_width:=640 color_height:=480 color_fps:=30(2)修改相机话题并以4hz频率发布
c
rosrun topic_tools throttle messages /camera/color/image_raw 4.0 /color
advertised as /color(3)使用张定友棋盘标定
c
rosrun camera_calibration cameracalibrator.py --size 8x6 --square 0.066 image:=/color
#--size 8x6:指定棋盘格的内部角点数量,这里是 8x6。
#--square 0.066:指定棋盘格每个方块的大小,单位是米(这里是 6.6 厘米)。
#image:=/color:指定从哪个话题获取相机图像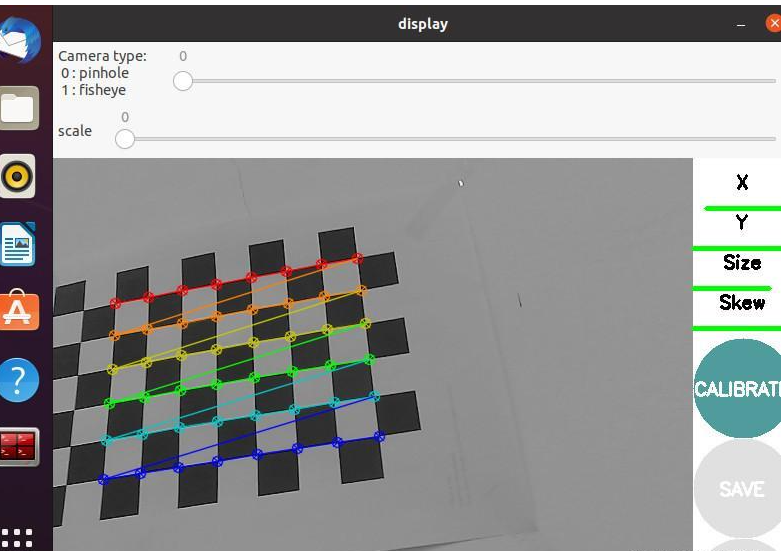
(4)保存标定结果
注意标定过程中左右,上下,前后,对角方向前后倾斜标定板,这样使得右边X,Y,Size,Skew变成绿色后,CALIBRATE按钮变为蓝色,然后点击(等上半分钟左右)变为下面三个按钮都可以点击,依次点击SAVE(保存)和COMMIT(提交)到相机配置文件中。即可将标定结果保存至本地。
(5)标定结果文件calibrationdata.tar.gz
点击SAVE之后:('Wrote calibration data to', '/tmp/calibrationdata.tar.gz')