引言:每当我们开始学习一个新的东西,我们都要给他们搭建好环境
这个是我学习ROS的一个笔记持续更新中
环境:Ubuntu22.04LTS
1.ROS 环境搭建
1.我们这里需要一个Ubuntu的虚拟机,这里我使用的是树莓派5B,这里只需要有一个Ubuntu环境就行,这里我推荐使用小鱼一键安装
bash
wget http://fishros.com/install -O fishros && bash fishros2.这里也可以使用容器技术速度快,而且更轻便
首先看自己有没有桌面版的Docker
在桌面版的Docker里面拉取镜像,并且生成一个容器
检测我们的容器是否生成
在windows终端power shell里面输入
docker stats
 出现这个证明容器生成啦
出现这个证明容器生成啦
之后的所有演示在容器里面运行
使用vscode安装插件dev containers。container tools docker这三个插件
连接到我们正在运行的容器中
2.安装成功之后
1.设置环境
我们通过在~/.bashrc里面输入这个source /opt/ros/humble/setup.bash
然后在终端上使用ros2命令
输出如下证明我们安装好啦
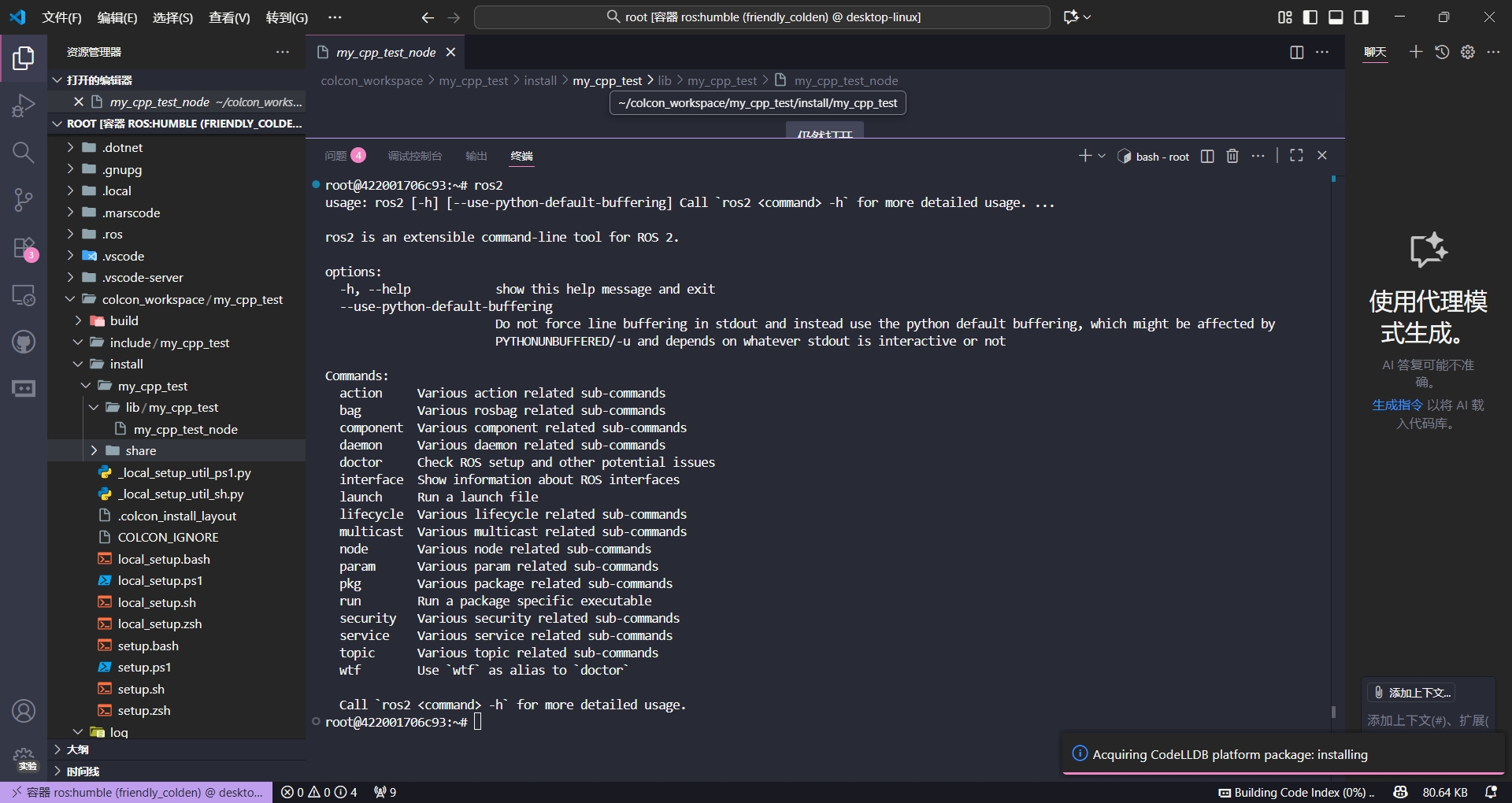
让我们从这个ros2给出的来进行学习吧
安装必要工具如rqt_graph
bash
sudo apt-get install ros-humble-rqt-graph 安装必要的oh-my-bash这个是个人比较喜欢酷一点的终端,并且安装好用的插件
在终端输入这个安装oh-my-bash
bash
bash -c "$(curl -fsSL https://raw.githubusercontent.com/ohmybash/oh-my-bash/master/tools/install.sh)")"安装rviz工具
bash
sudo apt-get install -y ros-humble-rviz2.ros action
我们在终端输入
bash
ros2 action -h显示如下
bash
root@422001706c93:~# ros2 action -h
usage: ros2 action [-h] Call `ros2 action <command> -h` for more detailed usage. ...
Various action related sub-commands
options:
-h, --help show this help message and exit
Commands:
info Print information about an action
list Output a list of action names
send_goal Send an action goal
Call `ros2 action <command> -h` for more detailed usage.我们先运行一个节点看看它是什么意思,运行ros2官方给的小乌龟节点
bash
ros2 turtlesim turtlesim_node我们拆分这个终端
1.ros2 action info
一个终端输入
bash
ros2 action info -h我们可以看到这个之后还有
bash
root@422001706c93:~# ros2 action info -h
usage: ros2 action info [-h] [-t] [-c] action_name
Print information about an action
positional arguments:
action_name Name of the ROS action to get
info (e.g. '/fibonacci')
options:
-h, --help show this help message and exit
-t, --show-types Additionally show the action type
-c, --count Only display the number of action
clients and action servers我们运行一下
bash
ros2 action info -t turtlesim看一下它是输出什么
bash
root@422001706c93:~# ros2 action info -t turtlesim
Action: turtlesim
Action clients: 0
Action servers: 0