本文图片来源网络,标注出处,如有侵权,私信删除。
主控单元
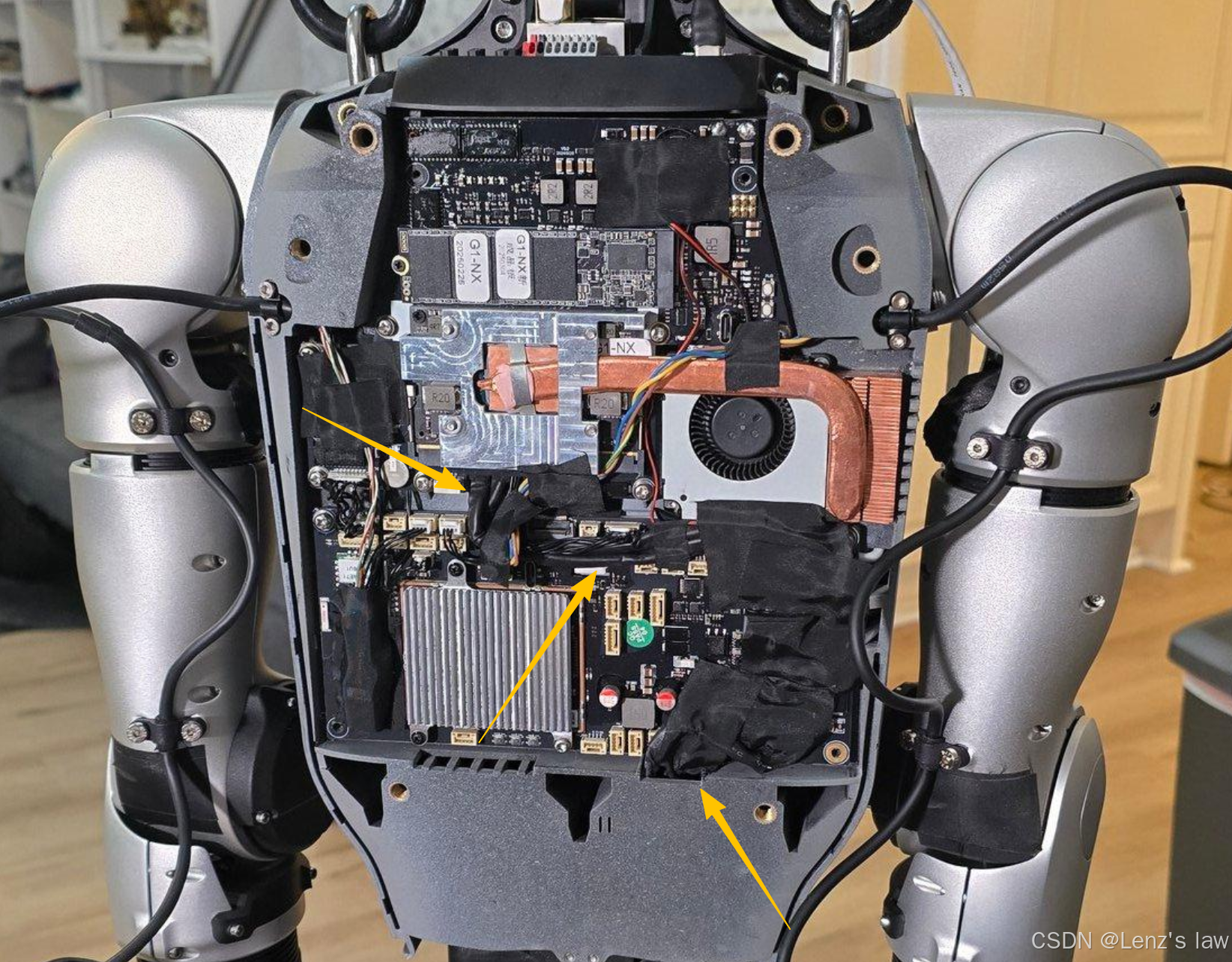
宇树G1主控电路板放置在胸腔,分为两大主要部分:
- 开发计算单元:大脑
- 运控计算单元:小脑
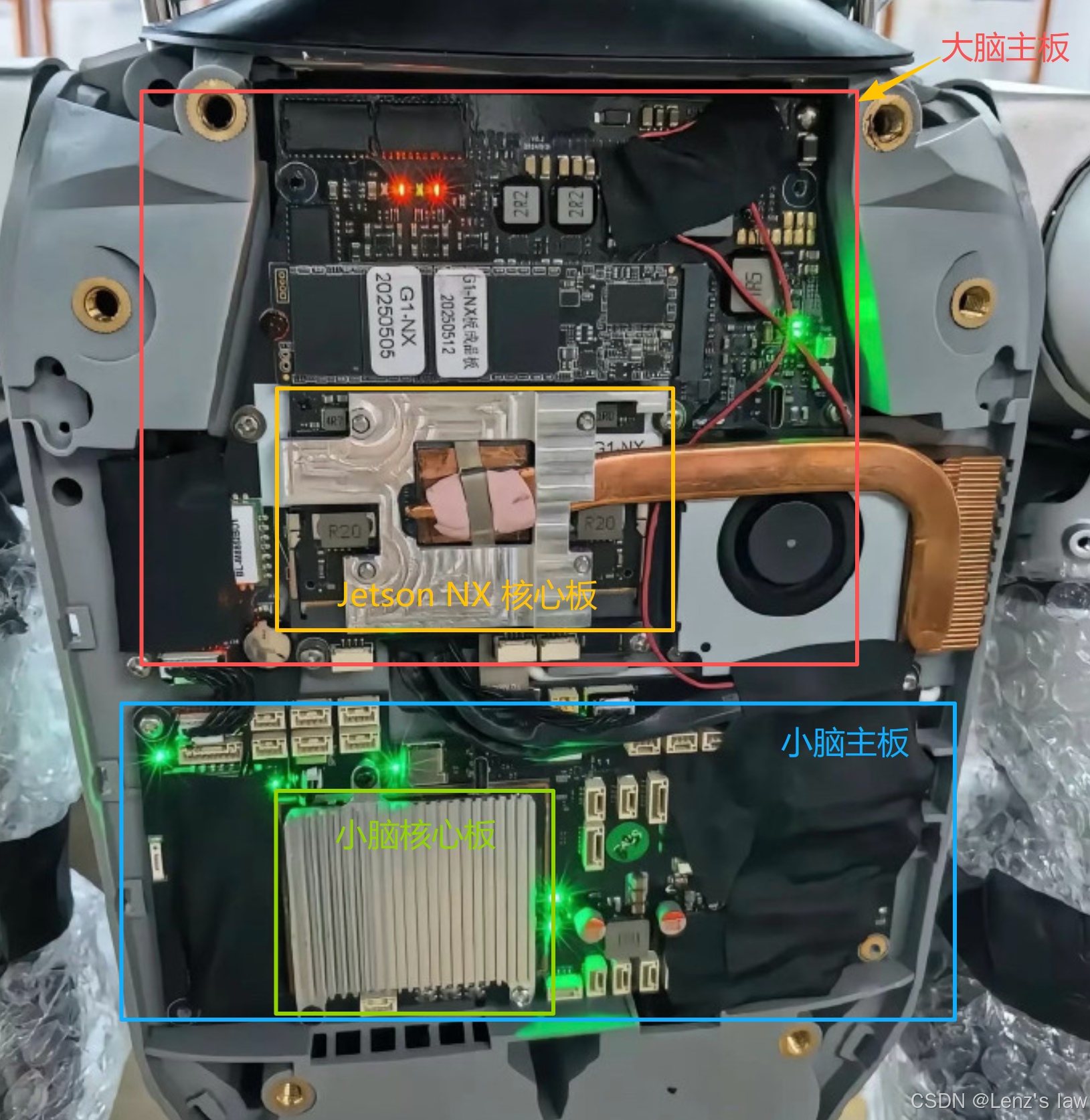
大脑算力单元
G1大脑为Nvidia Jetson Orin NX
采用Orin核心板+自研底板设计
Orin核心板上方为NVMe固态硬盘
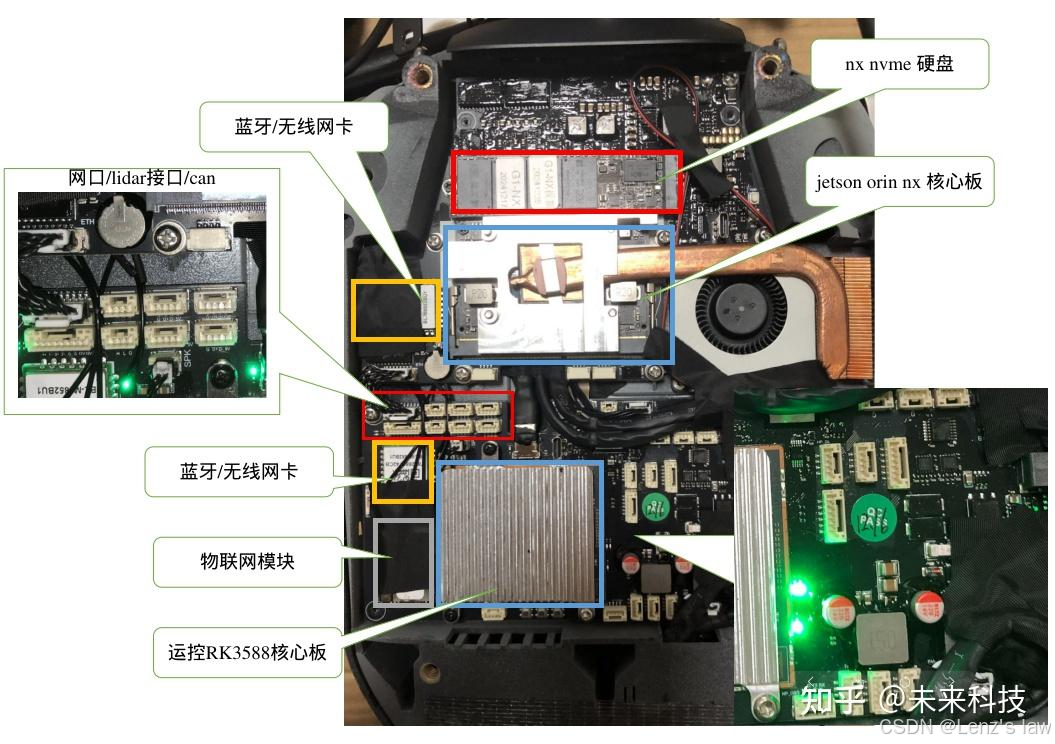
小脑运控单元
胸腔下半部分为小脑运控单元,也采用核心板+底板设计。据网上资料采用瑞芯微RK3588的主控方案,疑似沿用的GO2的成熟运控方案。
运控单元主要功能:
- 运动规划计算,计算各个关机的执行参数
- 通过总线精确控制机器人本体各个关节电机的力矩和角度
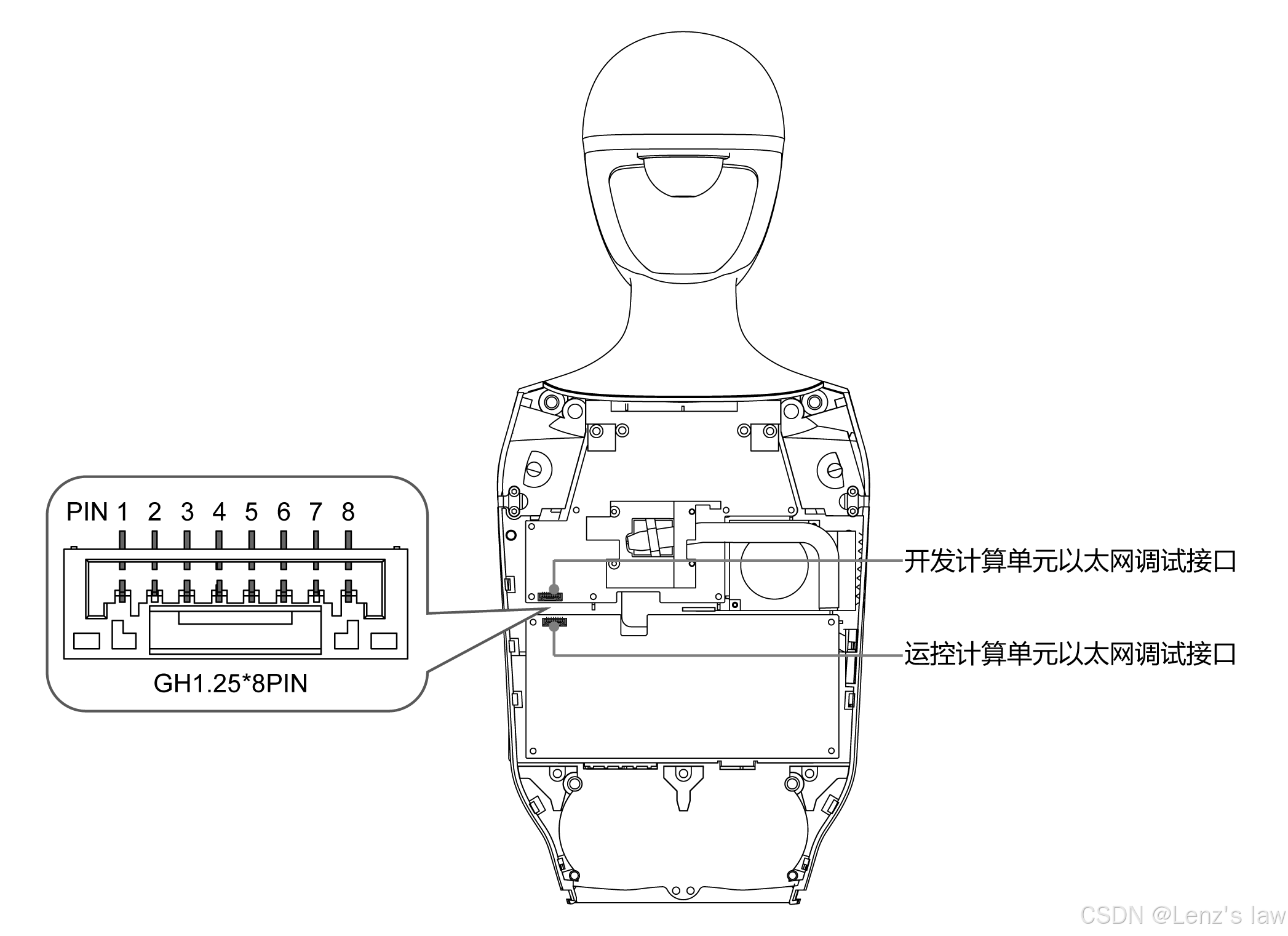
大小脑之间通讯连接
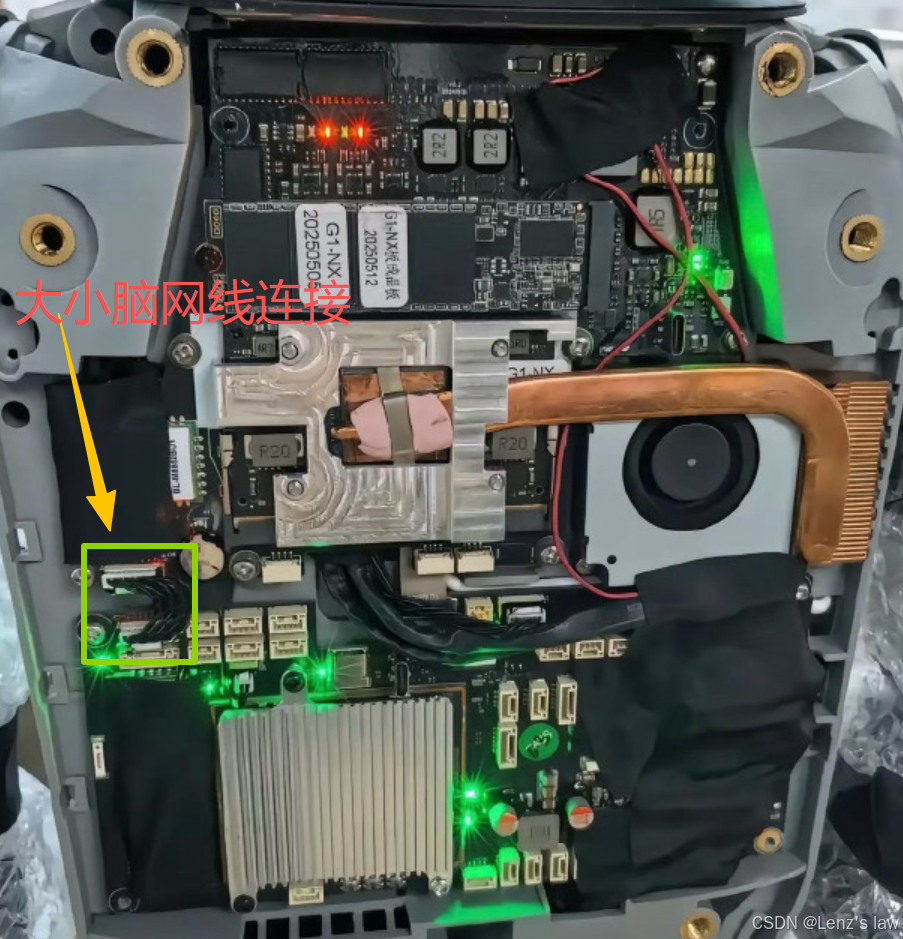
电机控制总线与小脑连接
G1 关节电机采用RS485总线控制,粗略分析应该有6路RS485(主板贴黑胶布看不清楚细节)
- 手臂*2路
- 腿*2路
- 头部*1路
- 腰部*1路