摘要 :
光伏发电作为清洁能源的重要组成部分,其核心组件------太阳能板(光伏组件)的可靠性直接影响电站发电效率与运维成本。然而,在生产、运输或长期户外运行过程中,太阳能板易出现隐裂、热斑、腐蚀、背板划伤等缺陷,传统人工巡检效率低、漏检率高。本文介绍如何基于 YOLOv12 与 OpenCV 构建一套端到端的太阳能板缺陷智能检测系统,实现对常见缺陷的自动识别与定位,为光伏电站智能运维提供技术支撑。
关键词:YOLOv12, OpenCV, 太阳能板缺陷检测, 光伏组件, 深度学习, 目标检测, 热斑, 隐裂, 工业AI, Python
【图像算法 - 31】基于深度学习的太阳能板缺陷检测系统:YOLOv12 + UI界面 + 数据集实现
1. 引言:智能运维,守护绿色能源
随着"双碳"目标推进,光伏发电装机容量持续攀升。然而,太阳能板在生命周期中面临多重挑战:
- 生产缺陷:隐裂(Micro-crack)、焊带虚焊、EVA 气泡
- 运输损伤:玻璃破裂、边框变形
- 户外老化:热斑(Hot Spot)、背板黄变/划伤、PID(电势诱导衰减)、腐蚀
这些缺陷若未及时发现,将导致:
- 发电效率下降 10%~30%
- 局部过热引发火灾风险
- 组件提前报废,增加 LCOE(平准化度电成本)
传统依赖人工目视或红外热像仪抽检的方式,存在覆盖不全、主观性强、成本高 等问题。
基于深度学习的视觉检测系统,可结合可见光图像 ,实现高精度、自动化、低成本 的缺陷筛查,是光伏智能运维的关键技术。

2. 技术选型:YOLOv12 + OpenCV 的高效组合
| 技术 | 作用 |
|---|---|
| YOLOv12 | 作为核心检测模型,用于在太阳能板图像中快速定位并分类各类缺陷区域。YOLOv12 在小目标与低对比度缺陷(如隐裂)上表现优异,适合光伏场景。 |
| OpenCV | 负责图像预处理(去噪、对比度增强)、结果可视化及与无人机/巡检机器人的集成。 |
3. 数据准备:构建太阳能板缺陷数据集
3.1 数据来源
- 无人机航拍(可见光 + 红外双模相机)
- 地面巡检机器人采集
- 实验室模拟缺陷样本(如人工制造隐裂、热斑)
3.2 常见缺陷类别定义
| 缺陷类型(英文) | 中文名称 | 特征描述 |
|---|---|---|
| crack | 隐裂 | 电池片内部细微裂纹,肉眼难辨,红外下呈线状发热 |
| hot_spot | 热斑 | 局部异常高温区域,通常由遮挡、损坏或旁路二极管失效引起 |
| scratch | 划伤 | 背板或玻璃表面线性损伤 |
| corrosion | 腐蚀 | 接线盒或边框金属氧化、锈蚀 |
| discoloration | 黄变/污渍 | EVA 老化发黄或表面积尘 |
| cell_mismatch | 电池片不匹配 | 不同批次电池片混装,红外温度分布异常 |
3.3 数据标注与格式
- 工具:LabelImg / CVAT
- 标注方式:Bounding Box(矩形框)
- 格式:YOLO 格式(
.txt文件,归一化坐标) - 示例
solar_defect.yaml:
yaml
path: ./solar_defect_dataset
train: images/train
val: images/val
nc: 4
names: ["bird_drop", "cracked", "dusty", "panel"]4. 模型训练:使用 YOLOv12 进行端到端学习
4.1 环境依赖
bash
pip install ultralytics opencv-python matplotlib4.2 训练命令
bash
yolo train \
model=yolo12n.pt \
data=solar_defect.yaml \
epochs=120 \
imgsz=640 \
batch=24 \
name=solar_yolo12s_v1 \
hsv_h=0.015 \
hsv_s=0.7 \
hsv_v=0.4 \
degrees=10.0 \
translate=0.1 \
scale=0.5说明:
- 选用
yolo12n.pt(nano 版本)平衡精度与速度- 增强策略侧重亮度/对比度变化 (模拟户外光照差异)和轻微旋转/缩放(适应无人机视角)
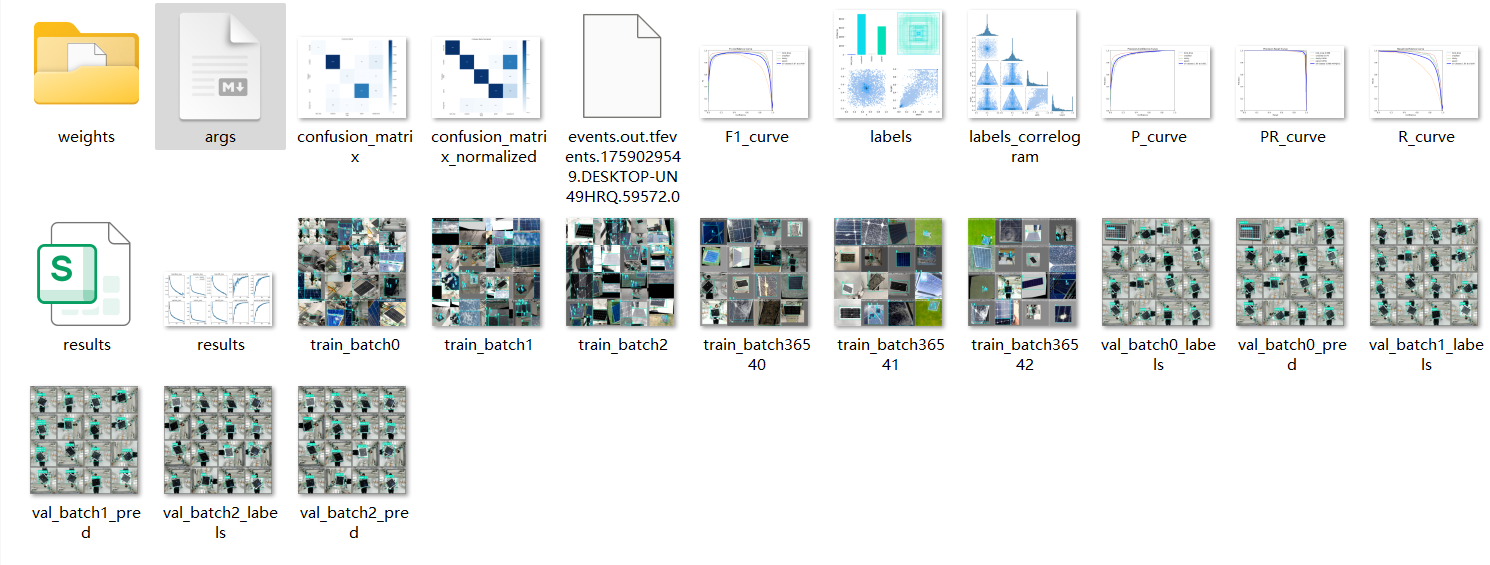
4.3 评估指标
训练完成后,在验证集上评估:
bash
yolo val model=runs/detect/solar_yolo12n_v1/weights/best.pt data=solar_defect.yaml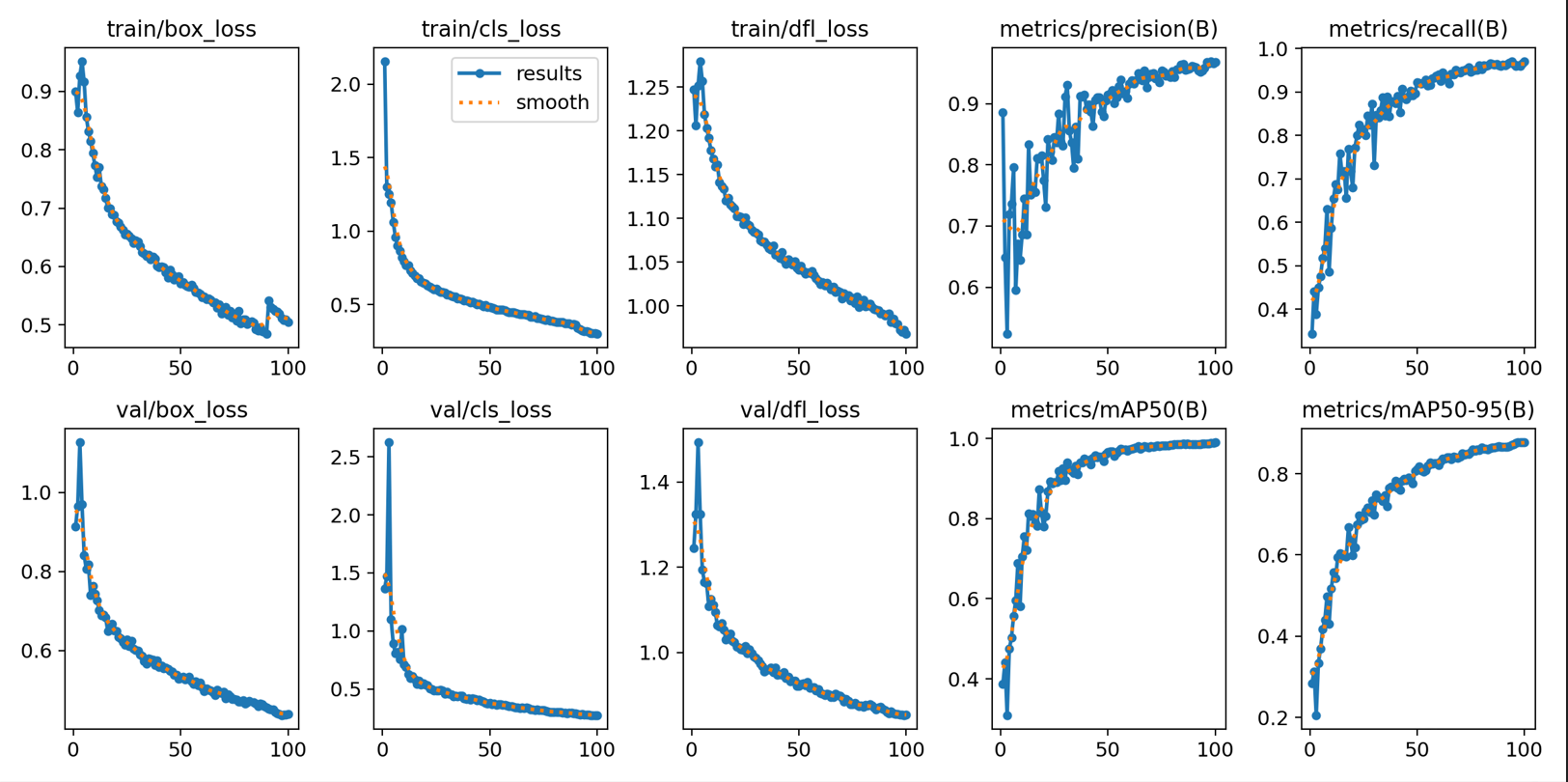
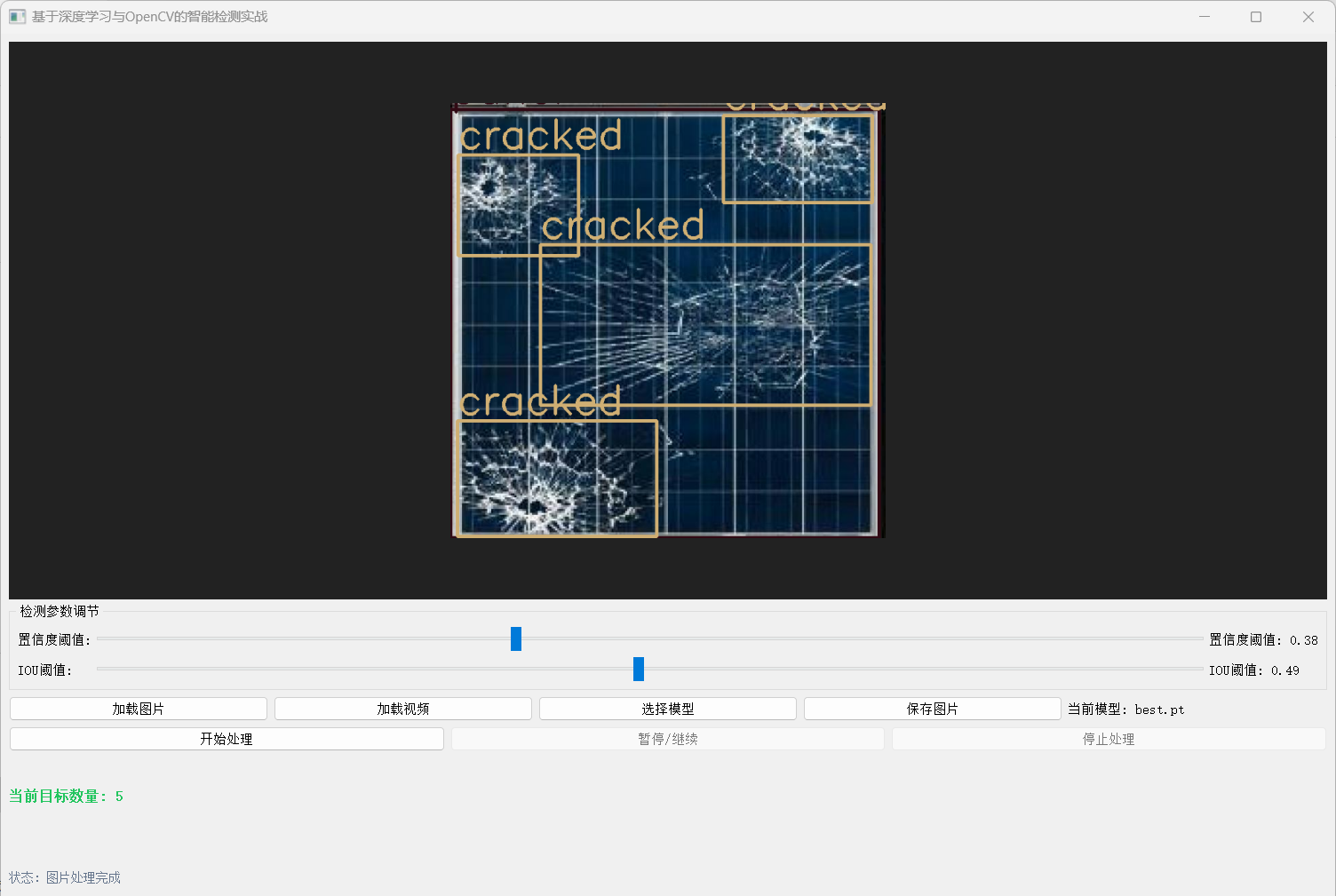
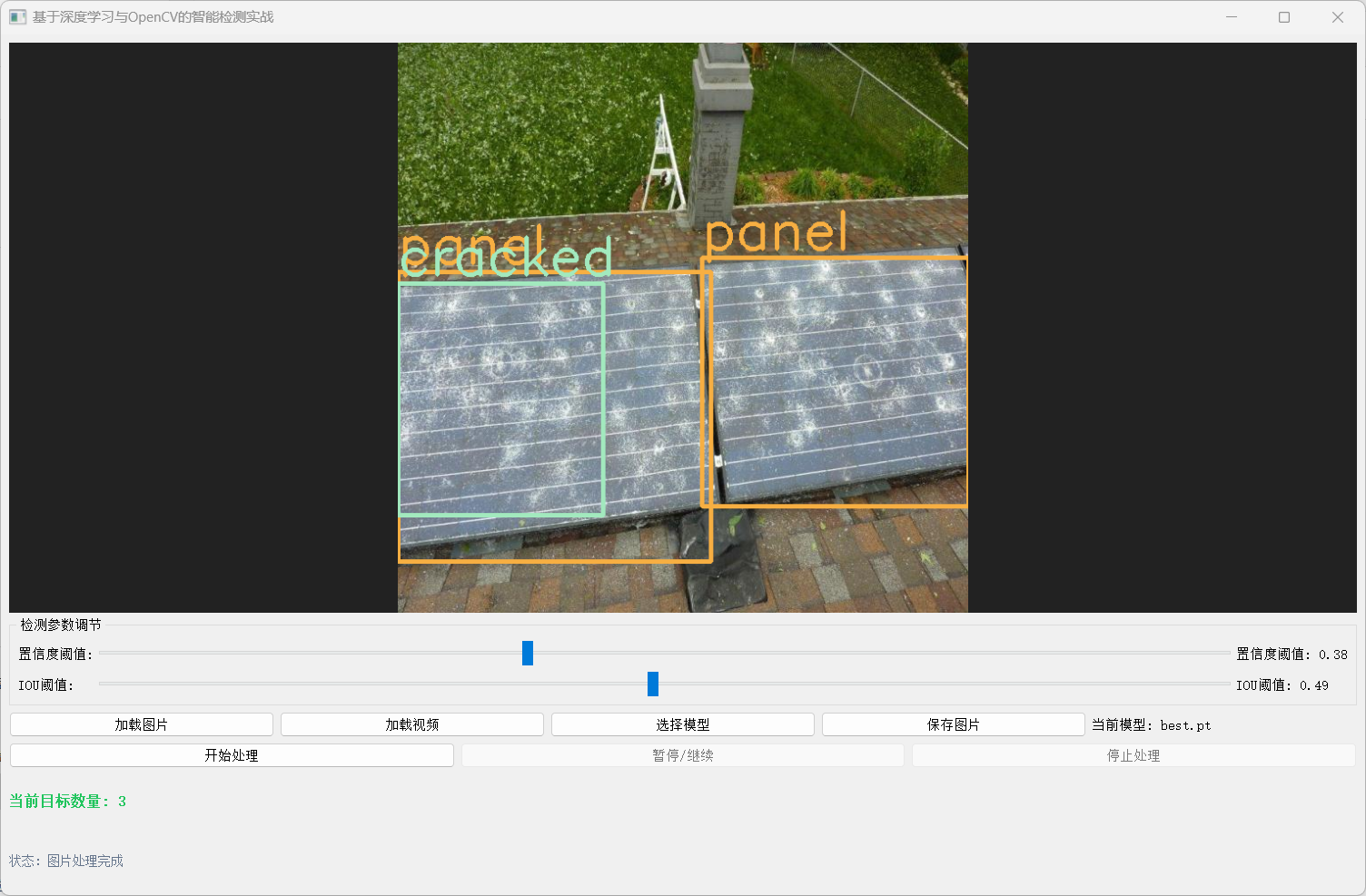
5. 推理与应用:OpenCV 实现太阳能板缺陷检测
python
import cv2
from ultralytics import YOLO
model = YOLO('runs/detect/solar_yolo12s_v1/weights/best.pt')
# 类别颜色映射(BGR)
colors = {
'bird_drop': (0, 0, 255), # 红:隐裂
'cracked': (0, 255, 255), # 青:热斑
'dusty': (255, 0, 255), # 品红:划伤
'panel': (255, 165, 0) # 橙:腐蚀
}
# 读取图像并检测
img = cv2.imread('solar_panel.jpg')
results = model(img)
# 可视化结果
for result in results:
boxes = result.boxes
for box in boxes:
x1, y1, x2, y2 = map(int, box.xyxy[0])
cls_id = int(box.cls[0])
conf = float(box.conf[0])
cls_name = result.names[cls_id]
color = colors.get(cls_name, (255, 255, 255))
cv2.rectangle(img, (x1, y1), (x2, y2), color, 2)
cv2.putText(img, f"{cls_name} {conf:.2f}", (x1, y1 - 10),
cv2.FONT_HERSHEY_SIMPLEX, 0.6, color, 2)
cv2.imshow('Solar Panel Defect Detection', img)
cv2.waitKey(0)
cv2.destroyAllWindows()6. 挑战与解决方案
| 挑战 | 解决方案 |
|---|---|
| 隐裂对比度低 | 采用红外图像 + CLAHE 增强 + YOLOv12 小目标优化头 |
| 光照变化大(晴/阴/早晚) | 数据增强(HSV 调整)+ 多时段数据采集 |
| 缺陷尺度差异大 | 多尺度训练(imgsz=640/1024)+ FPN 特征融合 |
| 无人机图像畸变 | 预处理阶段进行镜头校正 |
| 实时性要求(巡检机器人) | 模型量化(FP16/INT8)+ TensorRT 加速 |
7. 展望
- 多模态融合:可见光 + 红外 + EL(电致发光)图像联合分析
- 时序分析:对比历史图像,识别缺陷演化趋势
- 边缘部署:模型部署至 Jetson Orin,实现无人机端侧实时检测
- 数字孪生集成:将检测结果映射至电站三维模型,可视化缺陷分布
- 预测性维护:结合气象、发电数据,预测组件寿命衰减
8. 总结
本文系统介绍了基于 YOLOv12 与 OpenCV 的太阳能板缺陷检测技术方案。该系统能够有效识别隐裂、热斑、划伤等常见缺陷,具备部署灵活、检测高效、扩展性强等优势,可广泛应用于光伏电站巡检、出厂质检、保险定损等场景。通过深度学习赋能绿色能源,我们正迈向更智能、更可靠的可持续未来。