目录
[2.2 应用](#2.2 应用)
1.背景
1)在位移控制中,电机采用编码器进行第一层速度-位移闭环;后安装在机械设备采用磁栅尺进行第二层位移闭环,以消除传动机构的间隙。
2)磁栅尺的更新速度远小于编码器更新速度;磁栅尺可以解决机械间隙导致编码器换算位移不准确的问题;
解决双反馈问题的办法:
1)第一种:保证编码器的速度-位移闭环不动;在此次基础上,再增加一个PID外环,用于磁栅尺的位移闭环;
缺点:磁栅尺的更新速度比较慢,导致pid的调节周期会变长,调节力度会变大,在接近目标的时候可能会引起震荡,pid的参数会特别难调整;
第二种:保证编码器的速度-位移闭环不动;在电机停止运行期间,用磁栅尺校准编码器的位置;
缺点:在控制过程中一直使用编码器数据,由于间隙及传动过程中的其他误差,会导致最后更新磁栅尺数据的时候产生数据跳动;
第三种:将编码器和磁栅尺的数据,采用融合算法,将二者数据融合,形成新的速度-位移闭环;
优点:在高速时采用编码器数据;低速时采用磁栅尺数据;统筹考虑了速度和精度;
2.互补滤波算法
2.1简介
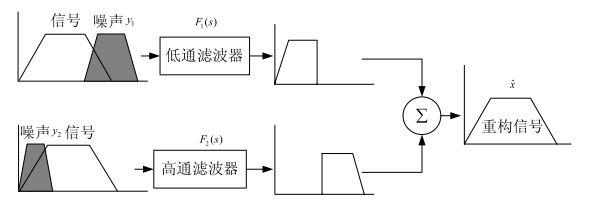
通过两路信号采集一组数据:
1)第一路信号有高频噪声,于是,采用低通滤波器过滤掉噪声形成数据a;
2)第二路信号有低频噪声,于是,采用高通滤波器过滤掉噪声形成数据b;
将数据a和b重新组合到一起,就获得了最准确的数据。这就是互补滤波。
2.2 应用
1)获取磁栅尺位移数据
2)获取编码器位移数据
3)融合二者数据
核心公式 fusion = α * encoder +(1 - α)*ruler
解释:α的值越小,越信任磁栅尺数据;α的值越大,越信任编码器的数据
4)利用磁栅尺更新修正编码器位移数据