更多机器人本体控制总线分析,请关注系列文章:
我们知道灵犀X1本体CANFD通讯的几个关键信息
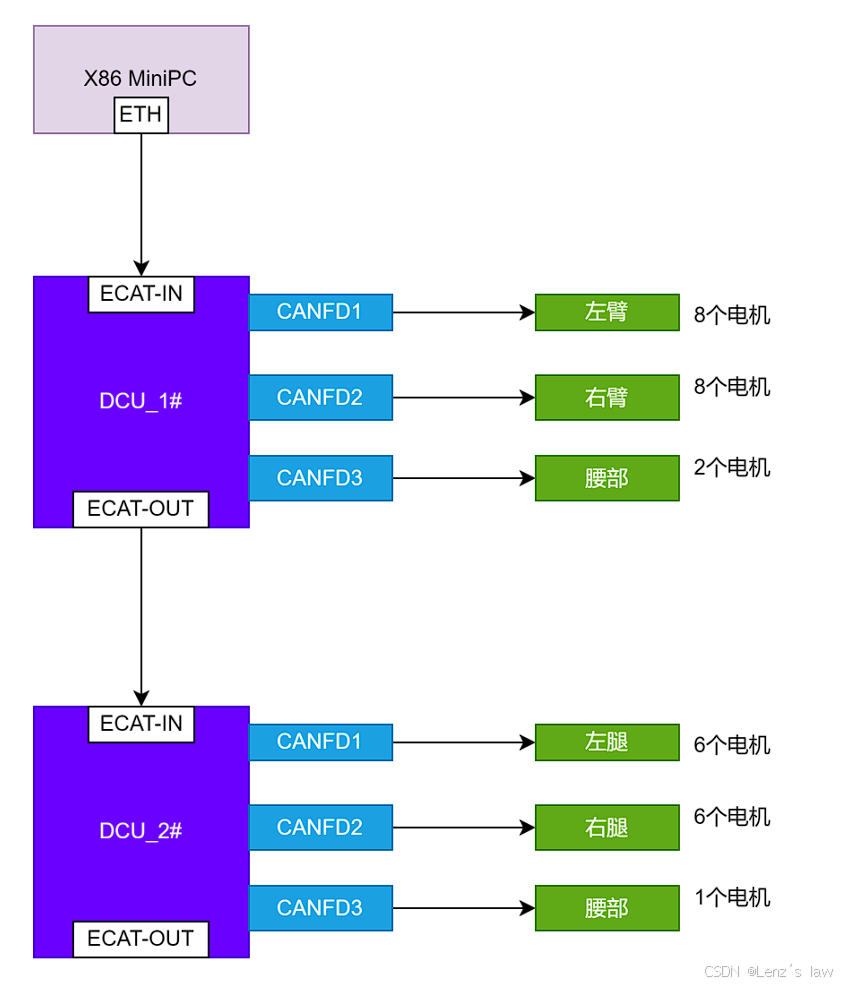
- 整机总共使用6路CANFD,波特率1M/5M
- 电机CANFD命令控制频率1KHz
- 一路CANFD总线最多的控制8个电机
本篇深入分析灵犀X2的CAN/FD通讯细节设计,并做详细性能分析。
CAN/FD通讯帧率和负载率
灵犀X1电机数量最多的是2两条手臂的CANFD总线-各挂了8个电机。
按1KHz控制频率计算,每秒钟需要发送8*1000条命令控制电机,再加8*1000条命令电机回复状态。
总计每秒帧数 = 发送8*1000 + 接收8*1000 = 1.6万帧/秒
但是,PowerFlow R系列电机支持广播命令,可以通过单个64字节的CANFD数据帧发送8个电机的控制参数来减少帧率,提高总线通讯效率。
实际上通讯帧率是:
发送64字节控制命令帧:1*1000 = 1000帧/秒
接收8字节电机状态帧:8*1000 = 8000帧/秒
总计9000帧/秒
CAN/FD总线通讯负载率计算
得到不同字节帧的帧率后,继续计算1M/5M 波特率下CANFD总线负载率
采用64字节广播命令
先计算1秒钟时长中所有CANFD帧通讯总时间开销。
|---------------|----------|----------|-------------|
| CANFD数据长度 | 单帧耗时 | 帧/每秒 | 总耗时 |
| 64字控制命令 | ~140us | 1000 | 140ms |
| 8字节电机回复 | ~50us | 8000 | 400ms |
| 合计 ||| ~540ms |
CANFD总线负载率就等于所有帧时间开销比计算周期1秒
总线负载率 : 540ms/1000ms = 54%
也就是说灵犀X1负载最大的手臂CANFD总线负载率为54%, 这个负载率不算高。这是通过CANFD的64字节帧优化通讯协议,尽可能利用了CANFD数据段高波特率的特性的结果。
如果不采用64字节协议,电机命令也使用8字节帧分别传输
|---------------|----------|----------|-------------|
| CANFD数据长度 | 单帧耗时 | 帧/每秒 | 总耗时 |
| 8字节电机命令 | ~50us | 8000 | 400ms |
| 8字节电机回复 | ~50us | 8000 | 400ms |
| 合计 ||| ~800ms |
若不采用64字节广播协议,负载率加重到了800ms/1000ms = 80%。
CANFD协议负载率优化关键
可以看出在控制频率和电机数量不变的情况下,提升CANFD单帧字节数来合并单帧传输更多命令,可以有效提高总线通讯效率。
核心原理解析
核心原因就在:CANFD总线超过1M的高速波特率仅使用在数据段
对于灵犀X1使用CANFD总线1M/5M来说,只有传输数据时才用到的5M的波特率加速传输,而ID(仲裁段)还是使用1M的波特率。
提升CANFD通讯效率的关键,就在于:尽可能的有效使用CANFD长数据帧进行传输
总结
灵犀X1 CANFD总线使用非常合理,值得参考学习:
- 通过5M高速波特率,单路CANFD总线可1KHz控制8个电机,保证关节流畅运行
- 通过合并多个电机的控制命令到单条CANFD 64字节报文,有效降低了约26%的总线负载率
- CANFD总线最大负载率54%左右,留有通讯余量,避免高负载率下的总线竞争,保证了通讯的实时性