1.1 数据结构
扩展 RTCM 消息输出格式参见下表。
表 1-1 二进制格式说明
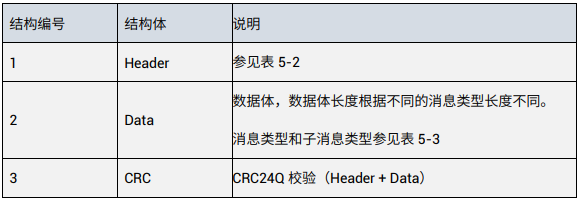
表 1-2 二进制格式数据头说明
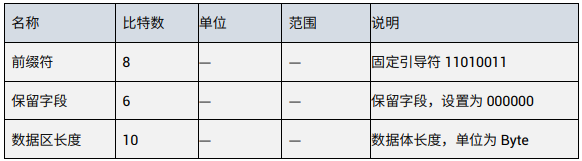
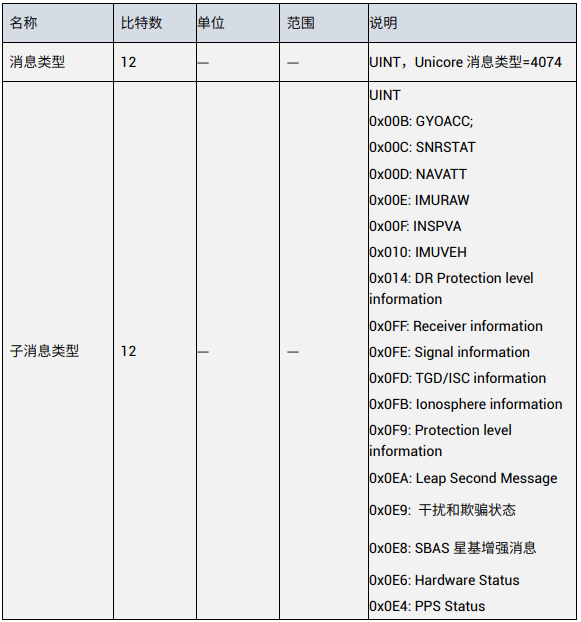
表 1-3 消息类型/子消息类型说明
二进制格式校验和采用 CRC24Q 校验,下面提供 C 语言示例:
U32 Crc24Q_U8(U8 *src, int len)
{
int i;
U32 crc = 0;
for (i = 0; i < len; i++)
crc = (crc << 8) ^ CRC24Q_Tablesrc\[i ^ (U8)(crc >> 16)];
return crc & 0xFFFFFF;
}
1.2 消息定义
1.2.1传感器融合消息
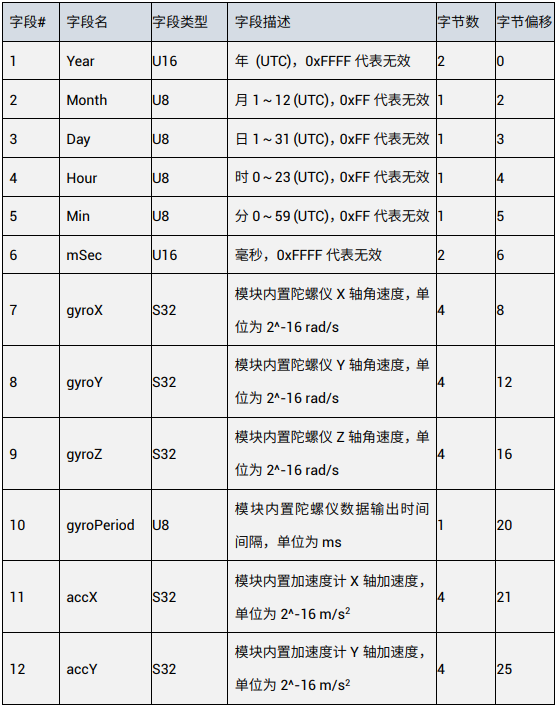
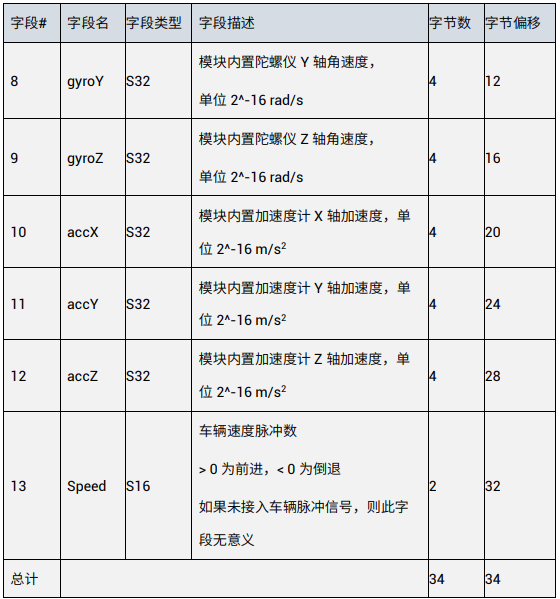
1.2.1.1 GYOACC (Sub ID 0x00B)
适用产品:UM621 系列、UM681A
表 1-4 输出 MEMS、里程计等传感器数据
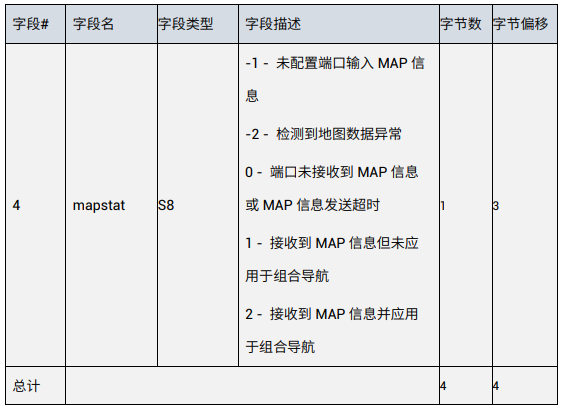
1.2.1.2 SNRSTAT (Sub ID 0x00C)
适用产品:UM621 系列、UM681A
表 1-5 输出初始化状态


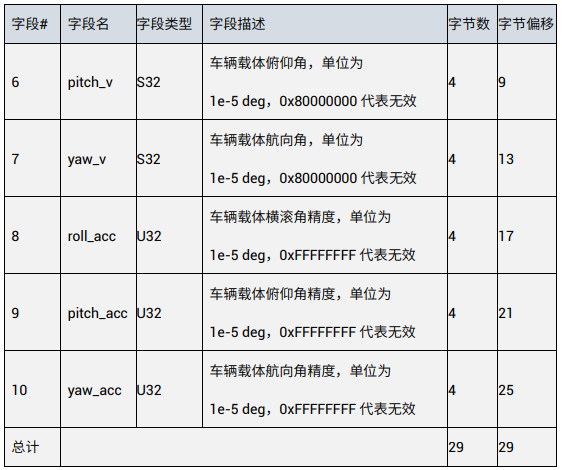
1.2.1.3 NAVATT (Sub ID 0x00D)
适用产品:UM621 系列、UM681A
表1-6 输出车辆载体的姿态航向信息

1.2.1.4 IMURAW (Sub ID 0x00E)
适用产品:UM621 系列、UM681A
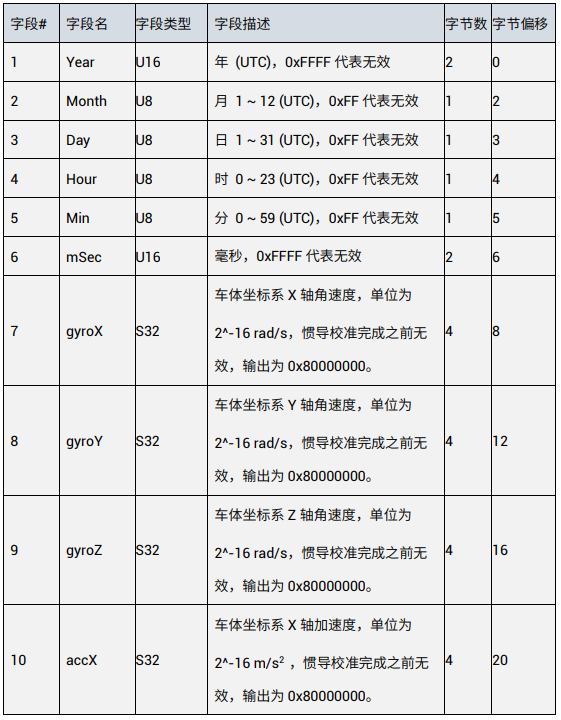
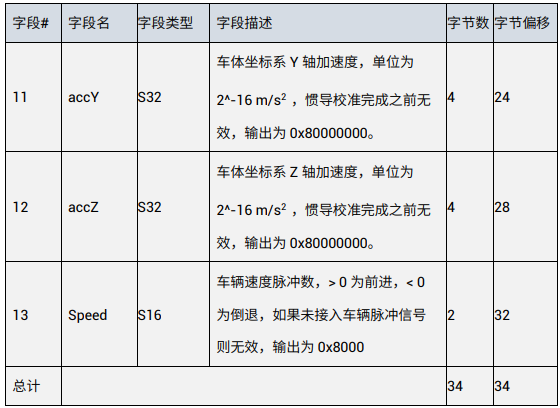
表 1-7 输出 MEMS 传感器原始数据

1.2.1.5INSPVA (Sub ID 0x00F)
适用产品:UM621 系列、UM681A
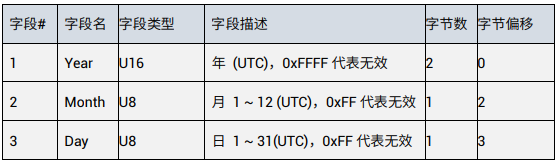
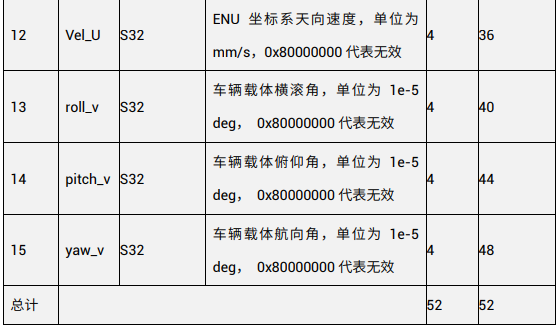
表 1-8 输出车辆载体 DR 推算的位置、速度和姿态信息

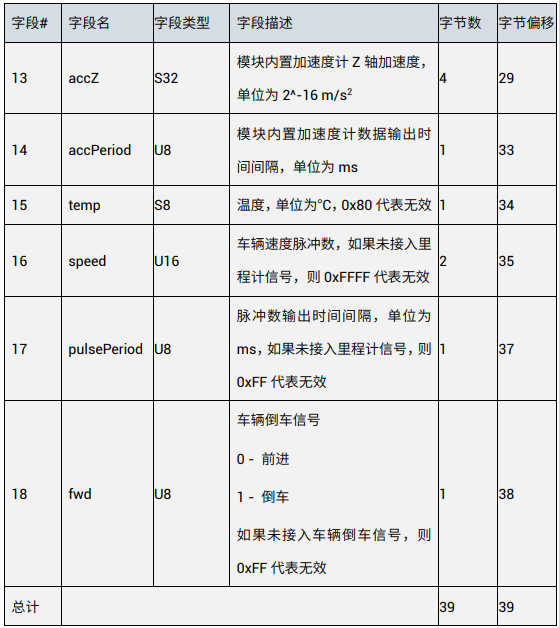
1.2.1.6 IMUVEH (Sub ID 0x010)
适用产品:UM621 系列、UM681A
表 1-9 输出补偿之后的车辆坐标系下 MEMS 传感器数据
1.2.1.7 DR Protection level Information (Sub ID 0x014)
适用产品:UM621 系列、UM681A
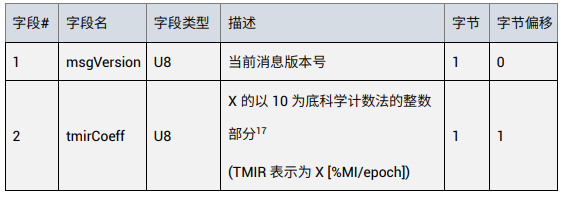
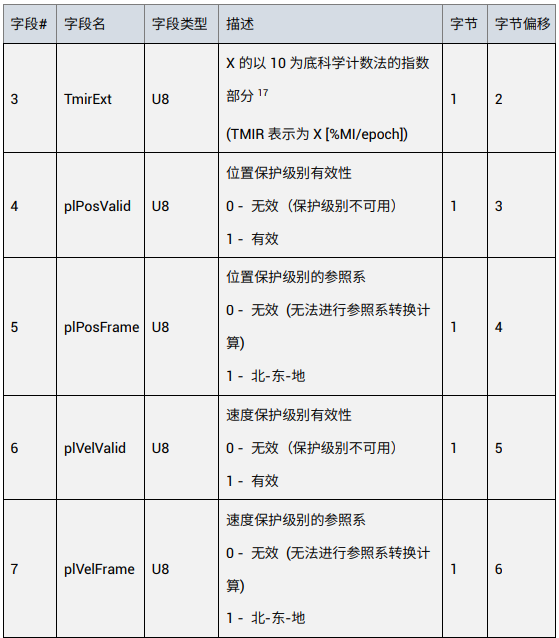
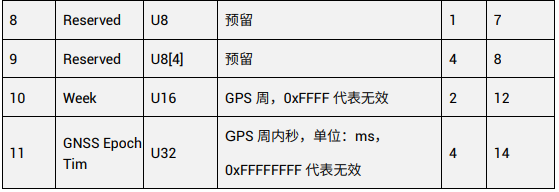
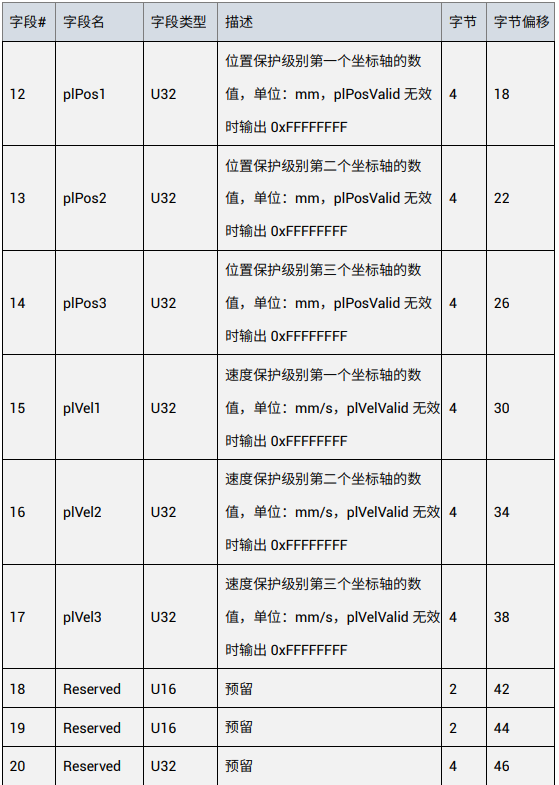
该消息提供接收机的组合导航保护级别(Protection Level, PL)信息,以及针对每个坐标轴 给定的目标误导信息风险(target misleading information risk ,TMIR)。当保护级别数值低 于实际误差值时将产生误导信息。TMIR 表示为 X %MI/epoch,即每个 Epoch 误导信息发 生的概率为 X%,X 以科学计数法表示,X= tmirCoeff*(10^TmirExt)。也就是说通过该消息可 得到当前定位信息的置信度,以及定位误差预估。消息定义参见表 5-10。
表 1-10 DR 保护级别消息

1.2.2 PVT消息
1.2.2.1Receiver Information(Sub ID 0x0FF)
适用产品:UC6580、UM670A、UM680A、UM681A、UM621 系列、UM620 系列
Receiver Information 协议内容主要为接收机状态相关信息,包括位置、速度、定位质量、 Dop 值、时钟信息等,数据传输采用大端格式。
1.2.2.2 Signal Information(Sub ID 0x0FE)
适用产品:UC6580、UM670A、UM680A、UM681A、UM621 系列、UM620 系列
Signal Information 协议内容主要为可用卫星的状态信息,包括 PRN、CN0、高度角、方位角、伪距残差等。无卫星信号时,Signal Information 语句输出 header 和 SatNum 字段,SatNum 字段置 0。数据传输采用大端格式。
1.2.2.3 TGD/ISC Information(Sub ID 0x0FD)
适用产品:UC6580、UM670A
TGD/ISC Information 协议内容主要为输出解析出每颗星的 TGD、ISC 信息,数据传输采用大端格式。
1.2.2.4 Ionosphere Information(Sub ID 0x0FB)
适用产品:UC6580、UM670A、UM680A、UM681A
数据类型播发的是 GPS、BDS 系统由广播星历解出的电离层参数,数据传输采用大端格式。
1.2.2.5 Protection level Information (Sub ID 0x0F9)
适用产品:UC6580、UM670A、UM621 系列、UM620 系列
该消息提供接收机的 GNSS 保护级别(Protection Level, PL)信息,以及针对每个坐标轴给 定的目标误导信息风险(target misleading information risk ,TMIR)。当保护级别数值低于 实际误差值时将产生误导信息。TMIR 表示为 X %MI/epoch,即每个 Epoch 误导信息发生 的概率为 X%,X 以科学计数法表示,X= tmirCoeff*(10^TmirExt)。也就是说通过该消息可得 到当前定位信息的置信度,以及定位误差预估。
1.2.2.6 Leap Second Message (Sub ID 0x0EA)
适用产品:UC6580、UM670A、UM621 系列、UM620 系列
Leap second message 协议输出闰秒及闰秒预报信息。
1.2.2.7 干扰和欺骗状态(SUB ID 0x0E9)
适用产品:UC6580、UM670A、UM621 系列、UM620 系列
此条协议输出干扰和欺骗信号状态,周期性输出。
1.2.2.8 SBAS 星基增强消息(Sub ID 0x0E8)
适用产品:UC6580、UM670A
此条协议输出星基增强信息。
1.2.2.9 Hardware Status (Sub ID 0x0E6)
适用产品:UM621 系列、UM620 系列
标识硬件状态。
1.2.2.10 PPS Status(Sub ID 0x0E4)
适用产品: UM621 系列、UM620 系列
此条协议输出 PPS 状态,包括输出频度、脉冲宽度、极性、延迟等信息。 该语句仅支持 1Hz 输出。
注:如有更新,请以和芯星通官网发布最新文件为准。