视频:第16.1讲 platform设备驱动实验-驱动的分离与分层_哔哩哔哩_bilibili
文档:《【正点原子】I.MX6U嵌入式Linux驱动开发指南V1.81.pdf》五十四章
一、驱动的分离与分层
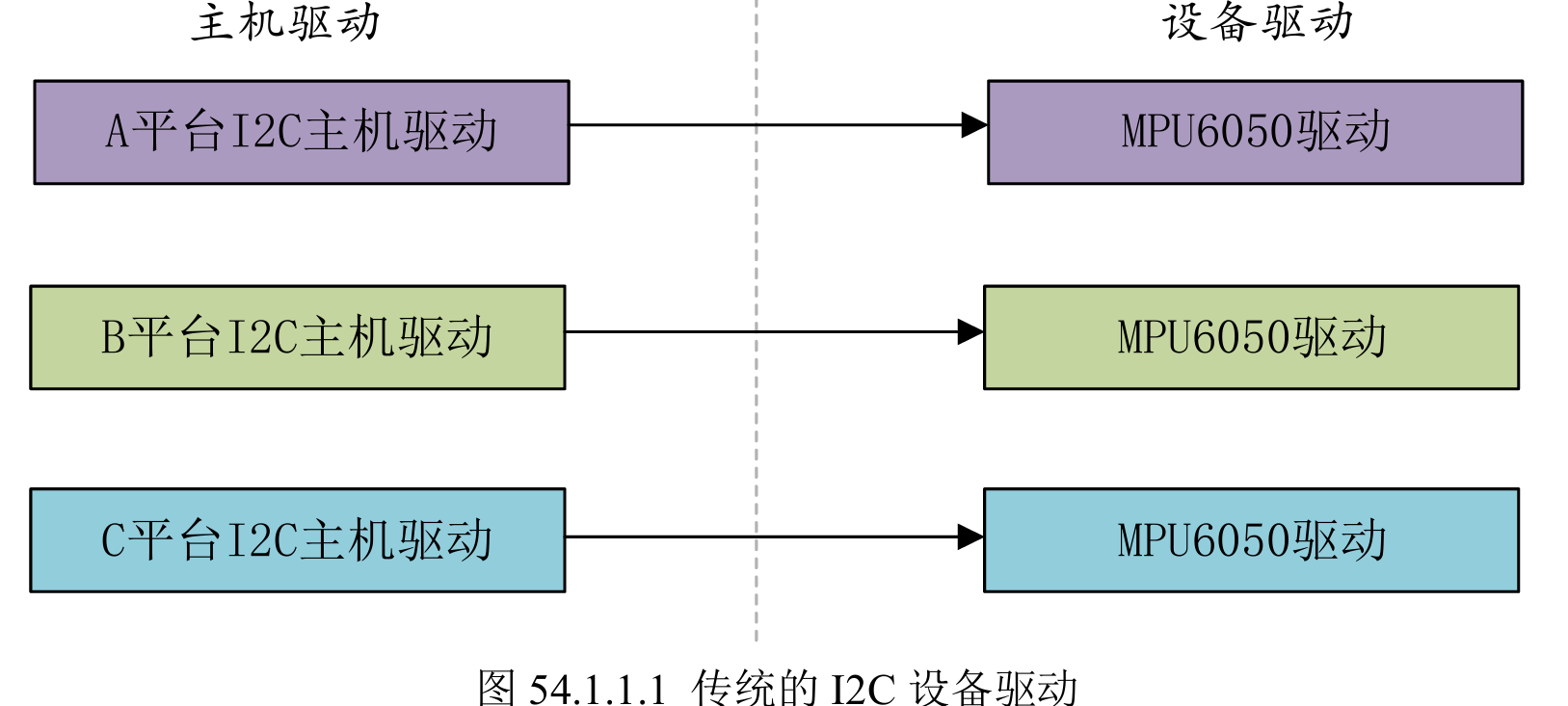
如果把传感器的驱动都写到一个.c文件里面,里面有传感器初始化、对某些开发板的IIC初始化巴拉巴拉,这时候想要将这个代码移植到另一个板子上 就需要很多修改。
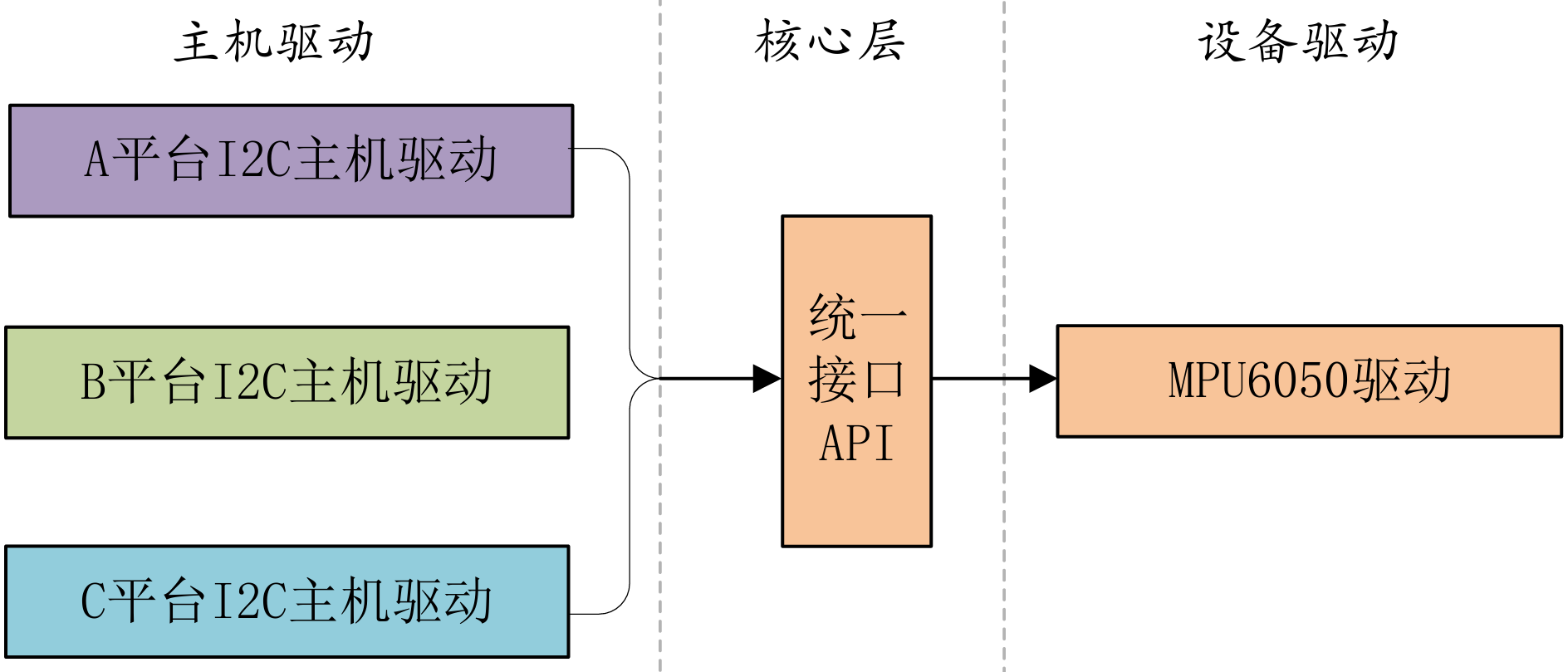
进行了分离后,就会有专门进行IIC初始化的文件,对外提供统一的接口,传感器初始化文件直接调用这个接口。移植时,只需要换成对应开发板的IIC文件即可。即主机控制器驱动和设备驱动分离。
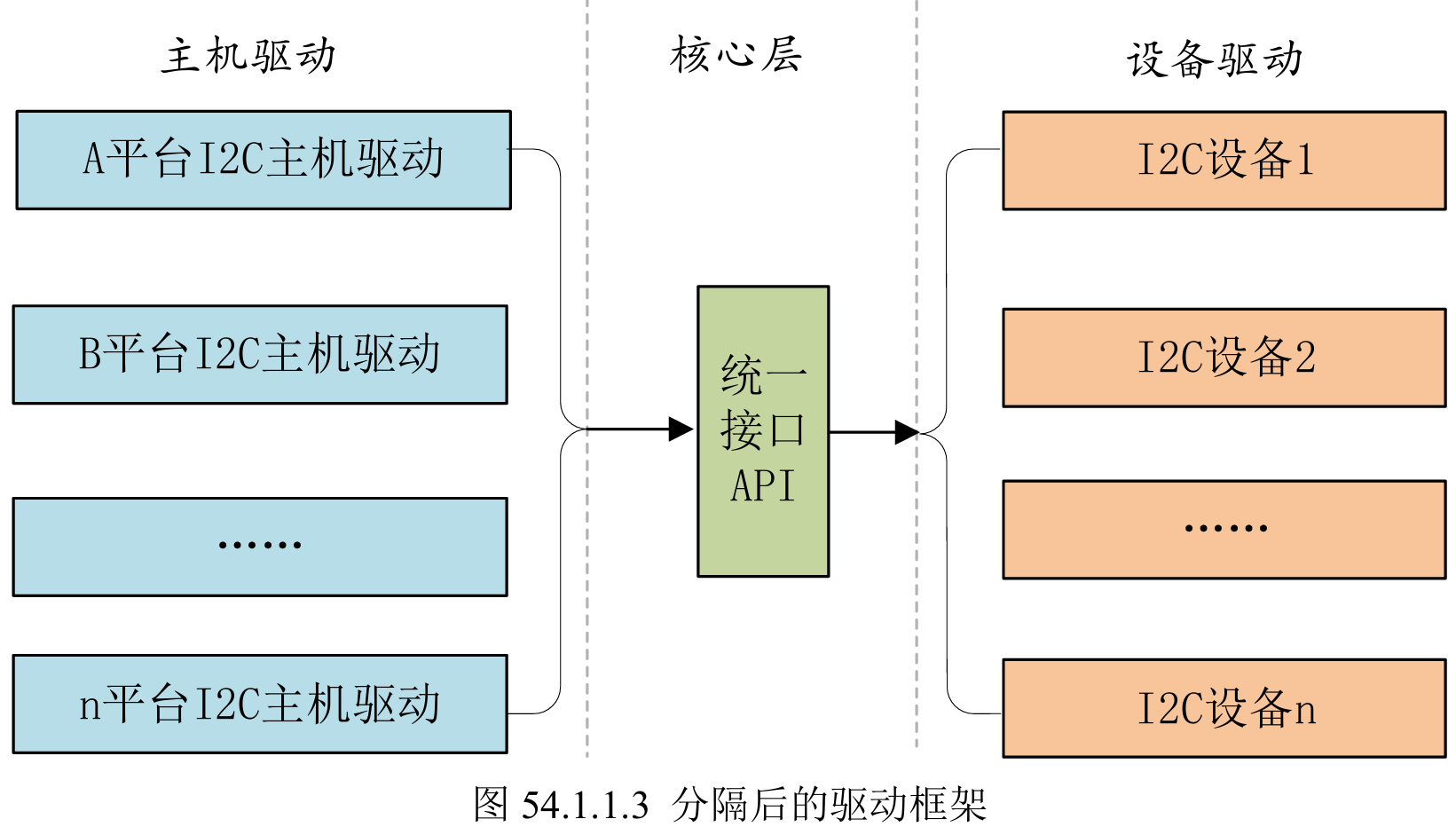
也就是《开发指南》中的三张图:
↓
在实际的驱动开发中,主机控制器驱动和设备驱动一般都已经由各自的厂家写好,我们只需要提供设备信息即可,比如设备连接到了哪个I2C接口上,I2C的速度是多少等等。相当于将设备信息从设备驱动中剥离,驱动使用标准方法去获取到设备信息(比如从设备树中获取),然后根据获取到的设备信息来初始化设备。
而总线则负责将两者联系起来。当向系统注册驱动 时,总线就会在右侧的设备中查找有没有匹配的设备;当向系统中注册设备时,总线就会在左侧的驱动中查找看有没有匹配的设备。
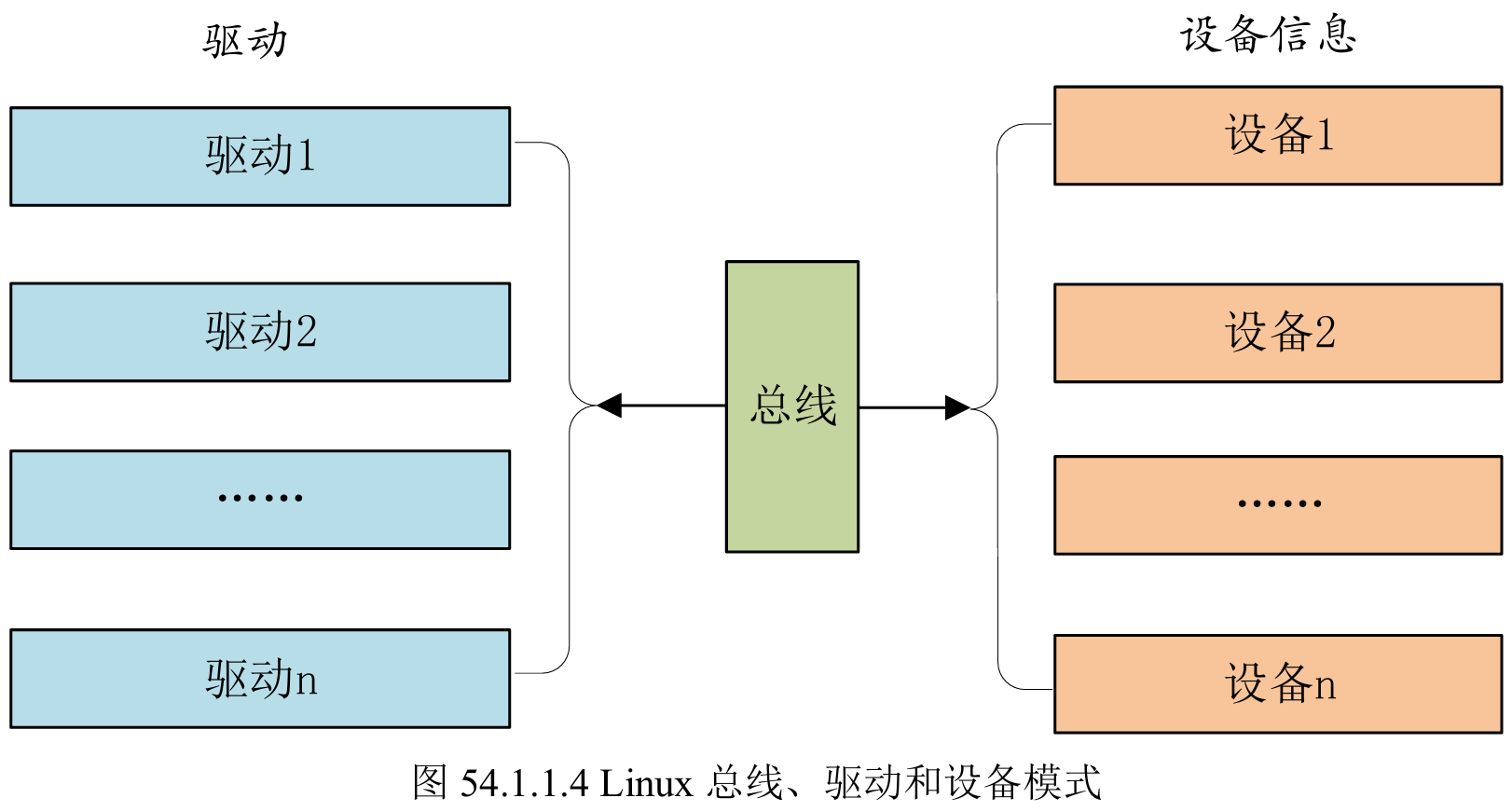
二、总线-驱动-设备
视频:第16.2讲 platform设备驱动实验-驱动、总线和设备
驱动的分离与分层衍生出 "总线-驱动-设备" 框架。
总线部分代码已由内核提供,我们需要编写驱动和设备 部分。驱动 指设备的驱动,设备指的是设备属性,如地址范围、IIC器件地址和速度等。
2.1 总线
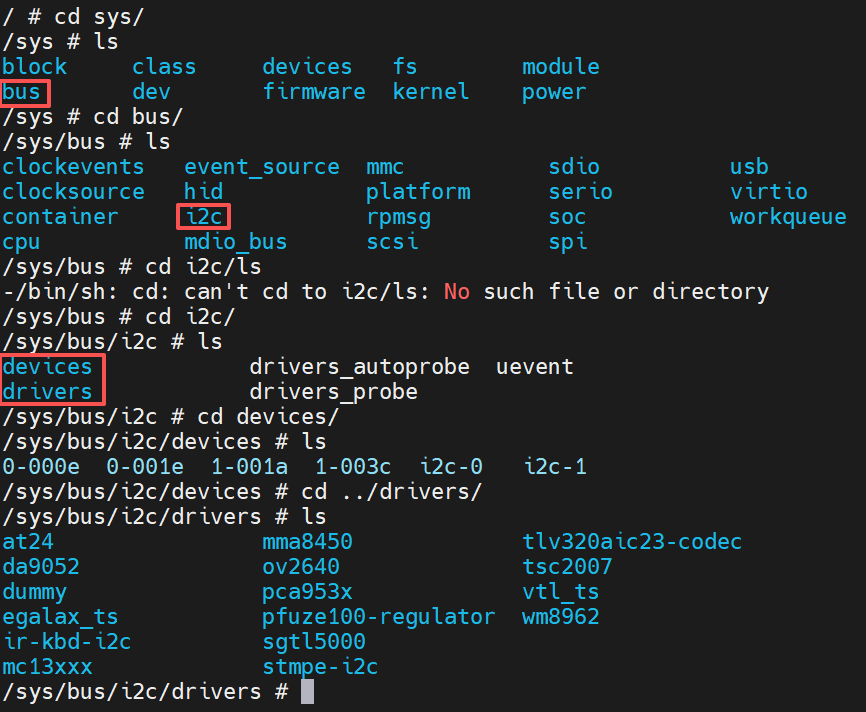
总线主要用于匹配总线下的设备和驱动。
开发板的/sys/bus里面存储了许多总线。进入i2c总线文件夹/sys/bus/i2c/,里面有devices和drivers文件夹,对应i2c总线的设备和驱动。
2.1.1 总线的数据类型
cpp
// 定义在include\linux\device.h
struct bus_type {
const char *name; // 总线名
const char *dev_name; // 总线上设备的默认名字前缀
struct device *dev_root;// 总线下所有设备的根目录设备指针(可选)
struct device_attribute *dev_attrs; /* use dev_groups instead */
const struct attribute_group **bus_groups; // 总线的属性集合
const struct attribute_group **dev_groups; // 总线上设备的属性集合
const struct attribute_group **drv_groups; // 总线上驱动的属性集合
int (*match)(struct device *dev, struct device_driver *drv);
// 非常重要。每个总线都必须实现。
// 此函数用于进行设备和驱动之间的匹配,总线就是使用match函数来根据注册的设备 /
// 来查找对应的驱动,或者根据注册的驱动来查找相应的设备,因此每一条总线都必须实现此函数
// match函数的两个参数:dev和drv分别为device和device_driver类型,即设备和驱动
int (*uevent)(struct device *dev, struct kobj_uevent_env *env); //向用户空间发送热插拔事件
int (*probe)(struct device *dev); // 找到匹配驱动时会被调用,用于设备初始化
int (*remove)(struct device *dev); // 设备移除或驱动卸载时会被调用,用于清理操作
void (*shutdown)(struct device *dev);// 系统关机或重启时调用
int (*online)(struct device *dev); // 标记设备上线
int (*offline)(struct device *dev); // 标记设备下线
int (*suspend)(struct device *dev, pm_message_t state); // 挂起时调用
int (*resume)(struct device *dev); // 恢复时调用
const struct dev_pm_ops *pm; // 电源管理操作集合,可以取代上面的suspend和resume
const struct iommu_ops *iommu_ops;
struct subsys_private *p;
struct lock_class_key lock_key;
};2.1.2 注册、卸载总线
cpp
int bus_register(struct bus_type *bus)
void bus_unregister(struct bus_type *bus)2.2 驱动
2.2.1 驱动的数据类型
cpp
// 定义在include\linux\device.h
struct device_driver {
const char *name;
struct bus_type *bus;
struct module *owner;
const char *mod_name; /* used for built-in modules */
bool suppress_bind_attrs; /* disables bind/unbind via sysfs */
const struct of_device_id *of_match_table;
const struct acpi_device_id *acpi_match_table;
int (*probe) (struct device *dev);
int (*remove) (struct device *dev);
void (*shutdown) (struct device *dev);
int (*suspend) (struct device *dev, pm_message_t state);
int (*resume) (struct device *dev);
const struct attribute_group **groups;
const struct dev_pm_ops *pm;
struct driver_private *p;
};2.2.2 注册、卸载驱动
cpp
// 定义在drivers\base\driver.c
int driver_register(struct device_driver *drv)
void driver_unregister(struct device_driver *drv)2.2.3 调用关系/执行顺序
调用太多,这里就不放完整代码了,看看就行。调用关系如下:
cpp
// 注册驱动→挂载到总线→遍历总线设备→匹配设备和驱动→绑定关系→调用probe
int driver_register(struct device_driver *drv)
// 注册驱动入口函数
└──int bus_add_driver(struct device_driver *drv)
// 把驱动添加到它所属总线的驱动链表中
└──int driver_attach(struct decive_driver *drv)
// 查找bus上的所有设备
└──int bus_for_each_dev(............)
// 遍历总线上所有已注册的设备
└──static int __driver_attach(struct device *dev, void *data)
// 尝试把一个设备和驱动绑定
└──static inline int driver_match_device(struct device_driver *drv, struct device *dev)
// 检查驱动和设备是否匹配
└──static int really_probe(struct device *dev, struct device_driver *drv)
// 真正的探测函数,一旦匹配成功就会调用
└──若匹配,则执行dev_probe // 最终要执行的probe函数2.3 设备
2.3.1 设备的数据类型
cpp
// 定义在include\linux\device.h
struct device {
struct device *parent;
struct device_private *p;
struct kobject kobj;
const char *init_name; /* initial name of the device */
const struct device_type *type;
struct mutex mutex; /* mutex to synchronize calls to its driver. */
struct bus_type *bus; /* type of bus device is on */
struct device_driver *driver; /* which driver has allocated this device */
............
};2.3.2 注册、卸载设备
cpp
// 定义在drivers\base\core.c
int device_register(struct device *dev)
void device_unregister(struct device *dev)三、platform平台驱动模型
视频:第16.3讲 platform设备驱动实验-platform总线简介1
IIC、SPI、USB是有具体的总线的,但是定时器、LCD等没有具体的总线,为此内核提供了一个虚拟的总线:platform总线,以及对应的platform驱动、platform设备。
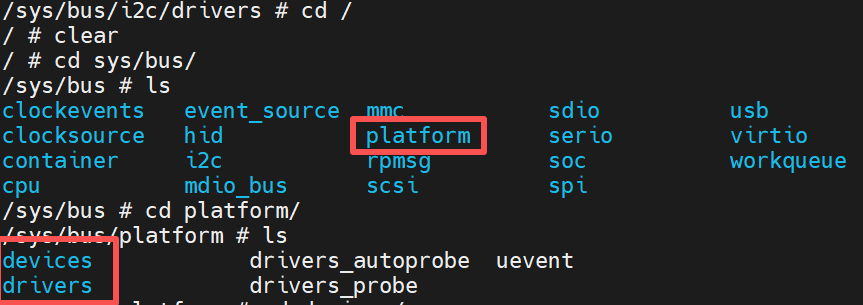
3.1 platform总线
3.1.1 注册
cpp
int __init platform_bus_init(void) //其核心就是调用了bus_register,注册的内容就是platform_bus_type3.1.2 数据类型------platform_bus_type
cpp
// 定义在drivers/base/platform.c
struct bus_type platform_bus_type = {
.name = "platform", // 总线名
.dev_groups = platform_dev_groups,// 设备属性集合
.match = platform_match, // 匹配函数,匹配设备和驱动。详见3.4
.uevent = platform_uevent,
.pm = &platform_dev_pm_ops,
// 总线级的.probe是可选的。如果总线没有提供.probe,
// 设备模型会回退调用驱动自己的.probe(也就是3.2.1中platform_driver中的probe)
};3.2 platform驱动
3.2.1 数据类型------platform_driver
(本次实验只需要定义probe和remove就够了)
cpp
// 定义在include/linux/platform_device.h
struct platform_driver {
int (*probe)(struct platform_device *); // 匹配成功就会调用
int (*remove)(struct platform_device *); // 设备移除或驱动卸载时会被调用,用于清理操作
void (*shutdown)(struct platform_device *);// 系统关机或重启时调用
int (*suspend)(struct platform_device *, pm_message_t state);// 挂起时调用
int (*resume)(struct platform_device *); // 恢复时调用
struct device_driver driver; // 基类
const struct platform_device_id *id_table; // 第三种匹配方式用到的id_table。具体结构体定义在include\linux\mod_devicetable.h
bool prevent_deferred_probe;
};其中:
3.2.1.1 成员device_driver的定义
(本次实验只需要用到name和of_match_table)
cpp
// 定义在include/linux/device.h
struct device_driver {
const char *name; // 驱动名,在没有设备树的情况下用于和设备匹配。
struct bus_type *bus;
struct module *owner;
const char *mod_name; /* used for built-in modules */
bool suppress_bind_attrs; /* disables bind/unbind via sysfs */
const struct of_device_id *of_match_table; // 用于有设备树时的匹配
const struct acpi_device_id *acpi_match_table;
int (*probe) (struct device *dev);
int (*remove) (struct device *dev);
void (*shutdown) (struct device *dev);
int (*suspend) (struct device *dev, pm_message_t state);
int (*resume) (struct device *dev);
const struct attribute_group **groups;
const struct dev_pm_ops *pm;
struct driver_private *p;
};3.2.1.2 成员of_match_table的定义
cpp
// 定义在include/linux/mod_devicetable.h
struct of_device_id {
char name[32];
char type[32];
char compatible[128]; // 用于和设备树中的节点的compatible属性进行匹配
const void *data;
};3.2.2 注册和卸载
cpp
// 定义在include\linux\platform_device.h
// 在向内核注册驱动时,如果匹配成功,会直接调用probe函数
#define platform_driver_register(drv) \
__platform_driver_register(drv, THIS_MODULE)
// 定义在drivers\base\platform.c
void platform_driver_unregister(struct platform_driver *drv)
// drv:要卸载的platform驱动3.3 platform设备
3.3.1 数据类型------platform_device
cpp
// 定义在include/linux/platform_device.h
struct platform_device {
const char *name; // 设备名,用于和驱动匹配
int id; //
bool id_auto;
struct device dev;//
u32 num_resources; // 资源数量,表示下一行resource资源的大小
struct resource *resource;// 设备信息,如外设寄存器等
const struct platform_device_id *id_entry;
char *driver_override; /* Driver name to force a match */
/* MFD cell pointer */
struct mfd_cell *mfd_cell;
/* arch specific additions */
struct pdev_archdata archdata;
};
// 实际编写代码时,并不是所有成员都需要配置,可以根据具体需要配置其中:
3.3.1.1 成员struct device的定义
cpp
// 定义在include/linux/device.h
struct device {
struct device *parent;
struct device_private *p;
struct kobject kobj;
const char *init_name; /* initial name of the device */
const struct device_type *type;
struct mutex mutex; /* mutex to synchronize calls to
* its driver.
*/
struct bus_type *bus; /* type of bus device is on */
struct device_driver *driver; /* which driver has allocated this
device */
void *platform_data; /* Platform specific data, device
core doesn't touch it */
void *driver_data; /* Driver data, set and get with
dev_set/get_drvdata */
struct dev_pm_info power;
struct dev_pm_domain *pm_domain;
#ifdef CONFIG_PINCTRL
struct dev_pin_info *pins;
#endif
#ifdef CONFIG_NUMA
int numa_node; /* NUMA node this device is close to */
#endif
u64 *dma_mask; /* dma mask (if dma'able device) */
u64 coherent_dma_mask;/* Like dma_mask, but for
alloc_coherent mappings as
not all hardware supports
64 bit addresses for consistent
allocations such descriptors. */
unsigned long dma_pfn_offset;
struct device_dma_parameters *dma_parms;
struct list_head dma_pools; /* dma pools (if dma'ble) */
struct dma_coherent_mem *dma_mem; /* internal for coherent mem
override */
#ifdef CONFIG_DMA_CMA
struct cma *cma_area; /* contiguous memory area for dma
allocations */
#endif
/* arch specific additions */
struct dev_archdata archdata;
struct device_node *of_node; /* associated device tree node */
struct fwnode_handle *fwnode; /* firmware device node */
dev_t devt; /* dev_t, creates the sysfs "dev" */
u32 id; /* device instance */
spinlock_t devres_lock;
struct list_head devres_head;
struct klist_node knode_class;
struct class *class;
const struct attribute_group **groups; /* optional groups */
void (*release)(struct device *dev);
struct iommu_group *iommu_group;
bool offline_disabled:1;
bool offline:1;
};3.3.1.2 成员resource的定义
cpp
struct resource {
resource_size_t start; // 起始地址
resource_size_t end; // 终止地址
const char *name;
unsigned long flags; // 标志该resource是什么类型的资源。资源类型定义在include/linux/ioport.h
struct resource *parent, *sibling, *child;
};3.3.2 注册和卸载
cpp
无设备树时,需要编写设备注册文件,并使用platform_device_register注册设备
有设备树时,直接修改设备树的设备节点即可。系统启动时会解析设备树并自动将其还原为platform_device结构体
// 定义在drivers\base\platform.c
int platform_device_register(struct platform_device *pdev)
// 当设备与platform驱动匹配时,就会执行platform_driver->probe函数
// 定义在drivers\base\platform.c
void platform_device_unregister(struct platform_device *pdev)
// pdev:要注销的platform设备3.4 match匹配函数和几种匹配方式
视频:第16.4讲 platform设备驱动实验-platform总线简介2
上面3.1.2 platform_bus_type例子中的platform_match就是匹配函数。具体的定义如下,提供了四种匹配方式:
cpp
// 定义在drivers/base/platform.c
static int platform_match(struct device *dev, struct device_driver *drv)
{
struct platform_device *pdev = to_platform_device(dev);
struct platform_driver *pdrv = to_platform_driver(drv);
/* When driver_override is set, only bind to the matching driver */
if (pdev->driver_override)
return !strcmp(pdev->driver_override, drv->name);
/* Attempt an OF style match first */
// OF类型匹配,即设备树采用的匹配方式
if (of_driver_match_device(dev, drv)) // 这个函数定义在include/linux/of_device.h
return 1;
// 设备驱动结构体device_driver中有个of_match_table成员变量,保存着驱动的compatible匹配表
// 设备树中的每个设备节点的compatible属性会和of_match_table表中的所有成员比较
// 如果有相同的条目就表示设备和此驱动匹配
// 设备和驱动匹配成功以后,就会调用bus_type中的probe函数
// device_driver结构体定义在include/linux/device.h
// of_match_table则是of_device_id类型的(定义在include\linux\mod_devicetable.h)
// 匹配表compatible就是of_device_id的成员,是一个char[128]数组
/* Then try ACPI style match */
// ACPI匹配
if (acpi_driver_match_device(dev, drv))
return 1;
// 每个ACPI设备在ACPI表中都会有硬件ID等属性,驱动程序会列出驱动支持的ID,以此判断是否匹配
/* Then try to match against the id table */
// id列表匹配
if (pdrv->id_table)
return platform_match_id(pdrv->id_table, pdev) != NULL;
// 设备驱动结构体platform_driver有个成员变量id_table,保存了很多id信息
// 存放着这个驱动所支持的设备类型
/* fall-back to driver name match */
// name字段匹配
return (strcmp(pdev->name, drv->name) == 0);
// 如果第三种匹配方式的id_table不存在的话,直接比较驱动和设备的name字段
// 如果相等的话就匹配成功
}3.5 platform_get_resource
在没有设备树的情况下,设备信息都保存在platform_device。platform_driver需要获取设备信息,就要用到platform_get_resource函数
cpp
// 定义在drivers/base/platform.c
struct resource *platform_get_resource(struct platform_device *dev, unsigned int type, unsigned int num)
// 类型resource:这个resource和3.3.1中的resource一样
// dev: 获取哪一个设备的信息
// type: 资源类型,与resource结构体中的flag一样,表示是什么类型的资源。资源类型定义在include/linux/ioport.h
// index:resource下标索引。目标resource可能是数组组成的多个设备,由index指定具体哪个设备。
// 如果只有一个设备就填0四、实验代码
4.1 无设备树
主要写platform_driver和platform_device
4.1.1 文件结构
cpp
18_PLATFORM(工作区)
└── 18_platform
├── .vscode
│ ├── c_cpp_properties.json
│ └── settings.json
├── leddevice.c
├── leddriver.c
├── 18_platform.code-workspace
├── newchrledAPP.c
└── Makefile4.1.2 Makefile
bash
CFLAGS_MODULE += -w
KERNELDIR := /home/for/linux/imx6ull/linux/linux-imx-rel_imx_4.1.15_2.1.0_ga_alientek # 内核路径
# KERNELDIR改成自己的 linux-imx-rel_imx_4.1.15_2.1.0_ga_alientek文件路径(这个文件从正点原子"01、例程源码"中直接搜,cp到虚拟机里面)
CURRENT_PATH := $(shell pwd) # 当前路径
obj-m := leddevice.o # 编译文件
obj-m += leddriver.o
build: kernel_modules # 编译模块
kernel_modules:
$(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) modules
clean:
$(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) clean 4.1.3 设备部分 leddevice.c
这个文件的功能相当于替代设备树。
cpp
#include <linux/module.h>
#include <linux/kernel.h>
#include <linux/init.h>
#include <linux/platform_device.h>
/* 寄存器物理地址 */
#define CCM_CCGR1_BASE (0x020C406C)
#define SW_MUX_GPIO1_IO03_BASE (0x020E0068)
#define SW_PAD_GPIO1_IO03_BASE (0x020E02F4)
#define GPIO1_DR_BASE (0x0209C000)
#define GPIO1_GDIR_BASE (0x0209C004)
#define REGISTER_LENGTH 4 // 地址长度
// 释放
void leddevice_release(struct device * dev){
printk("leddevice release\r\n");
}
//
// 5个寄存器,需要设置5个resource
static struct resource led_resources[] = {
[0] = {
.start = CCM_CCGR1_BASE, // 起始地址
.end = CCM_CCGR1_BASE + REGISTER_LENGTH - 1, // 终止地址
.flags = IORESOURCE_MEM, // 寄存器类型
},
[1] = {
.start = SW_MUX_GPIO1_IO03_BASE,
.end = SW_MUX_GPIO1_IO03_BASE + REGISTER_LENGTH - 1,
.flags = IORESOURCE_MEM,
},
[2] = {
.start = SW_PAD_GPIO1_IO03_BASE,
.end = SW_PAD_GPIO1_IO03_BASE + REGISTER_LENGTH - 1,
.flags = IORESOURCE_MEM,
},
[3] = {
.start = GPIO1_DR_BASE,
.end = GPIO1_DR_BASE + REGISTER_LENGTH - 1,
.flags = IORESOURCE_MEM,
},
[4] = {
.start = GPIO1_GDIR_BASE,
.end = GPIO1_GDIR_BASE + REGISTER_LENGTH - 1,
.flags = IORESOURCE_MEM,
},
};
static struct platform_device leddevice={
.name = "imx6ull_led", // 设备名,用于和驱动进行匹配
.id = -1, // 表示设备没有id号
.dev = {
.release = &leddevice_release, //释放该platform device时执行
},
.num_resources = ARRAY_SIZE(led_resources),
.resource = led_resources,
};
// 加载设备
static int __init leddevice_init(void){
platform_device_register(&leddevice);
return 0;
}
// 卸载设备
static void __exit leddevice_exit(void){
platform_device_unregister(&leddevice);
}
module_init(leddevice_init);
module_exit(leddevice_exit);
MODULE_LICENSE("GPL");4.1.4 驱动部分 leddriver.c
驱动部分基本Linux驱动开发笔记(四)的实验代码修改
更新了:
修改了部分设备变量的命名
增加了platform_driver结构体及其remove、probe函数
将原来驱动入口/驱动注册函数的功能移到probe函数中。驱动入口函数只负责调用platform驱动注册函数platform_driver_register
将原来驱动出口/驱动卸载函数的功能移到remove函数中。驱动出口函数只负责调用platform驱动卸载函数platform_driver_unregister
cpp
#include <linux/module.h>
#include <linux/kernel.h>
#include <linux/init.h>
#include <linux/platform_device.h>
#include <linux/fs.h>
#include <linux/uaccess.h>
#include <linux/io.h>
#include <linux/cdev.h>
#include <linux/kdev_t.h>
#include <linux/stat.h>
#include <linux/device.h>
/* 地址映射后的虚拟地址指针 */
static void __iomem *IMX6U_CCM_CCGR1;
static void __iomem *SW_MUX_GPIO1_IO03;
static void __iomem *SW_PAD_GPIO1_IO03;
static void __iomem *GPIO1_DR;
static void __iomem *GPIO1_GDIR;
/* LED状态 */
#define LEDOFF 0
#define LEDON 1
#define PLATFORM_NAME "platled" // 设备名
#define PLATFORM_COUNT 1 // led设备数量
/////////////////////////////////////////////////////
/* 设备结构体 */
struct newchrled_dev{
struct cdev cdev;
dev_t devid; /* 设备号 */
int major; /* 主设备号 */
int minor; /* 此设备号 */
struct class *class; /* 类 */
struct device *device; /* 设备 */
};
struct newchrled_dev newchrled; /* led设备 */
/////////////////////////////////////////////////////
// LED状态翻转
static void led_swtich(u8 sta){
u32 val = 0;
if(sta == LEDOFF){
/* 关灯 */
printk("turn off\r\n");
val = readl(GPIO1_DR); // 32bit读取函数
val |= (1 << 3); // 将bit3置为高电平,关闭LED
writel(val, GPIO1_DR);
}
else if(sta == LEDON){
/* 开灯 */
val = readl(GPIO1_DR); // 32bit读取函数
val &= ~(1 << 3); // 将bit3置为低电平,打开LED
writel(val, GPIO1_DR);
printk("turn on\r\n");
}
}
static int newchrled_open(struct inode *inode, struct file *filp){
return 0;
}
static int newchrled_release(struct inode *inode, struct file *filp){
return 0;
}
static ssize_t newchrled_write(struct file *filp, const char __user *buf, size_t count, loff_t *ppos){
int retvalue;
unsigned char databuf[1];
retvalue = copy_from_user(databuf, buf, count);
if(retvalue < 0){
printk("kernel write fauled!\r\n");
return -EFAULT;
}
led_swtich(databuf[0]);
return 0;
}
/* 字符设备操作集合 */
static const struct file_operations newchrled_fops = {
.owner = THIS_MODULE,
.write = newchrled_write,
.open = newchrled_open,
.release = newchrled_release,
};
///////////////////////////////////////////////////////
// 匹配成功就会执行probe
static int led_probe(struct platform_device *dev){
unsigned int val = 0;
int i = 0, ret = 0;
printk("led driver prob\r\n");
struct resource *ledsource[5];
for(i=0; i<5; i++){
ledsource[i] = platform_get_resource(dev, IORESOURCE_MEM, i);
if(ledsource[i] == NULL)return -EINVAL;
// resource_size
}
// 地址映射
IMX6U_CCM_CCGR1 = ioremap(ledsource[0]->start, resource_size(ledsource[0])); // 这里resource_size(ledsource[0]=4
SW_MUX_GPIO1_IO03 = ioremap(ledsource[1]->start, resource_size(ledsource[1]));
SW_PAD_GPIO1_IO03 = ioremap(ledsource[2]->start, resource_size(ledsource[2]));
GPIO1_DR = ioremap(ledsource[3]->start, resource_size(ledsource[3]));
GPIO1_GDIR = ioremap(ledsource[4]->start, resource_size(ledsource[4]));
// 初始化
val = readl(IMX6U_CCM_CCGR1); // 32bit读取函数
val &= ~(3 << 26); // 清除26、27位的数据为0,其余位保持不变。 其中3的二进制为11,~为取反操作。
val |= 3 << 26; // 将26、27位置为1
writel(val, IMX6U_CCM_CCGR1); // 将 val 写入 IMX6U_CCM_CCGR1,使能CCM_CCGR1的gpio1时钟。
writel(0x5, SW_MUX_GPIO1_IO03); // 复用GPIO1------IO03
writel(0x10B0, SW_PAD_GPIO1_IO03); //设置GPIO1_IO03电气属性
val = readl(GPIO1_GDIR); // 32bit读取函数
val |= 1 << 3; // 设置PIO1_IO03为output。 将GPIO1_GDIR第3位 置为1
writel(val, GPIO1_GDIR);
// 关灯
val = readl(GPIO1_DR); // 32bit读取函数
val |= (1 << 3); // 将bit3置为高电平,关闭LED
writel(val, GPIO1_DR);
// 分配设备号
if (newchrled.major){ // 如果已经给定主设备号
newchrled.devid = MKDEV(newchrled.major, 0);
ret = register_chrdev_region(newchrled.devid, PLATFORM_COUNT, PLATFORM_NAME);
}
else{ // 没有给定主设备号
ret = alloc_chrdev_region(&newchrled.devid, 0, PLATFORM_COUNT, PLATFORM_NAME);
newchrled.major = MAJOR(newchrled.devid);
newchrled.minor = MINOR(newchrled.devid);
}
if (ret < 0)
{
printk("newchrled chrdev_region error!\r\n");
return -1;
}
printk("devid = %d:%d\r\n", newchrled.major, newchrled.minor);
// 注册字符设备
newchrled.cdev.owner = THIS_MODULE;
cdev_init(&newchrled.cdev, &newchrled_fops);
ret = cdev_add(&newchrled.cdev, newchrled.devid, PLATFORM_COUNT);
// 自动创建设备节点
newchrled.class = class_create(THIS_MODULE, PLATFORM_NAME); // 创建类
if(IS_ERR(newchrled.class)){
return PTR_ERR(newchrled.class);
}
newchrled.device = device_create(newchrled.class, NULL, newchrled.devid, NULL, PLATFORM_NAME); // 创建设备
if(IS_ERR(newchrled.device)){
return PTR_ERR(newchrled.device);
}
return 0;
}
static int led_remove(struct platform_device * dev){
printk("led driver remove\r\n");
// 删除字符设备
cdev_del(&newchrled.cdev);
// 注销设备号
unregister_chrdev_region(newchrled.devid, PLATFORM_COUNT);
// 删除类
device_destroy(newchrled.class,newchrled.devid);
class_destroy(newchrled.class);
return 0;
}
// platform驱动结构体
static struct platform_driver led_driver = {
.driver = {
.name = "imx6ull_led", // 驱动名,用于和设别匹配
},
.remove = led_remove,
.probe = led_probe,
};
///////////////////////////////////////////////////////////////////
// 加载驱动
static int __init leddriver_init(void){
return platform_driver_register(&led_driver);
}
// 卸载驱动
static void __exit leddriver_exit(void){
platform_driver_unregister(&led_driver);
}
module_init(leddriver_init);
module_exit(leddriver_exit);
MODULE_LICENSE("GPL");4.1.5 应用程序
应用程序直接把Linux驱动开发笔记(四)实验的应用程序搬过来。只有调用方式发生改变。
cpp
#include<stdio.h>
#include<unistd.h>
#include<sys/types.h>
#include<sys/stat.h>
#include<fcntl.h>
#include<stdlib.h>
#include<string.h>
/*
* @description : main主程序
* @param - argc : argv数组元素个数
* @param - argv : 具体参数
* @return : 0 成功; else失败
* 调用 ./newchrledAPP <filename> <0:1> 0关灯,1开灯
* ./newchrledAPP /dev/platled 0 关灯
* ./newchrledAPP /dev/platled 1 开灯
*/
#define LEDOFF 0
#define LEDON 1
int main(int argc, char *argv[]){
if(argc != 3){ // 判断用法是否错误
printf("Error Usage!\r\n");
return -1;
}
char *filename;
int fd = 0;
unsigned char databuf[1];
int retvalue = 0;
filename = argv[1];
fd = open(filename, O_RDWR); // 读写模式打开驱动文件filename
if(fd <0){
printf("file %s open failed!\r\n");
return -1;
}
databuf[0] = atoi(argv[2]); // char 2 int
retvalue = write(fd, databuf, sizeof(databuf)); // 缓冲区数据写入fd
if(retvalue <0){
printf("LED Control Failed!\r\n");
close(fd);
return -1;
}
close(fd);
return 0;
}4.1.6 测试
bash
# VSCODE终端
make
arm-linux-gnueabihf-gcc newchrledAPP.c -o newchrledAPP
sudo cp leddevice.ko leddriver.ko newchrledAPP /.../linux/nfs/rootfs/lib/modules/4.1.15/
# 串口
cd /lib/modules/4.1.15/
depmod
modprobe leddevice.ko
modprobe leddriver.ko # 此时应当能看到输出led driver prob
# 说明执行了platform_driver的prob函数,匹配成功
ls /sys/bus/platform/devices/ # 此时应当能看到设备imx6ull_led
ls /sys/bus/platform/drivers/ # 此时应当能看到驱动imx6ull_led
./newchrledAPP /dev/platled 1 # 此时开发板红灯亮起
./newchrledAPP /dev/platled 0 # 此时开发板红灯熄灭
rmmod leddriver.ko # 此时应能看到输出"led driver remove",说明执行了platform_driver的remove函数
rmmod leddevice.ko # 此时应能看到输出"leddevice release",说明执行了platform_device的release函数可以看到

4.2 有设备树
有设备树以后就不需要向总线注册设备了,直接修改设备树即可。
设备和驱动匹配成功后,就会把设备树对应节点的信息直接转为platform_device结构体的信息,不需要手动传。
4.2.1 文件结构
有了设备树,可以直接删掉leddevice.c了。
bash
19_DTSPLATFORM(工作区)
└── 19_dtsplatform
├── .vscode
│ ├── c_cpp_properties.json
│ └── settings.json
├── leddriver.c
├── 19_dtsplatform.code-workspace
├── newchrledAPP.c
└── Makefile4.2.2 Makefile
bash
CFLAGS_MODULE += -w
KERNELDIR := /.../linux/imx6ull/linux/linux-imx-rel_imx_4.1.15_2.1.0_ga_alientek # 内核路径
# KERNELDIR改成自己的 linux-imx-rel_imx_4.1.15_2.1.0_ga_alientek文件路径(这个文件从正点原子"01、例程源码"中直接搜,cp到虚拟机里面)
CURRENT_PATH := $(shell pwd) # 当前路径
obj-m := leddriver.o # 编译文件
build: kernel_modules # 编译模块
kernel_modules:
$(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) modules
clean:
$(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) clean 4.2.3 修改设备树
修改内容与Linux驱动开发笔记(六)3.1部分一致:
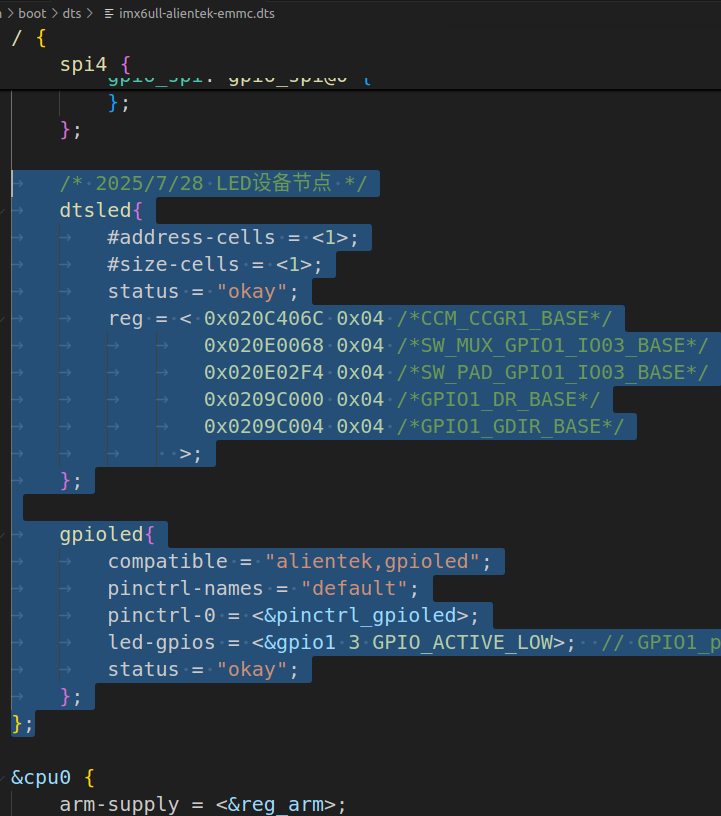
①在arch/arm/boot/dts/imx6ull-alientek-emmc.dts文件的设备树根节点最后添加LED设备节点:
bash
/* 2025/7/28 LED设备节点 */
dtsled{
#address-cells = <1>;
#size-cells = <1>;
status = "okay";
reg = < 0x020C406C 0x04 /*CCM_CCGR1_BASE*/
0x020E0068 0x04 /*SW_MUX_GPIO1_IO03_BASE*/
0x020E02F4 0x04 /*SW_PAD_GPIO1_IO03_BASE*/
0x0209C000 0x04 /*GPIO1_DR_BASE*/
0x0209C004 0x04 /*GPIO1_GDIR_BASE*/
>;
};
gpioled{
compatible = "alientek,gpioled";
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_gpioled>;
led-gpios = <&gpio1 3 GPIO_ACTIVE_LOW>; // GPIO1_pin3 低电平有效
status = "okay";
};
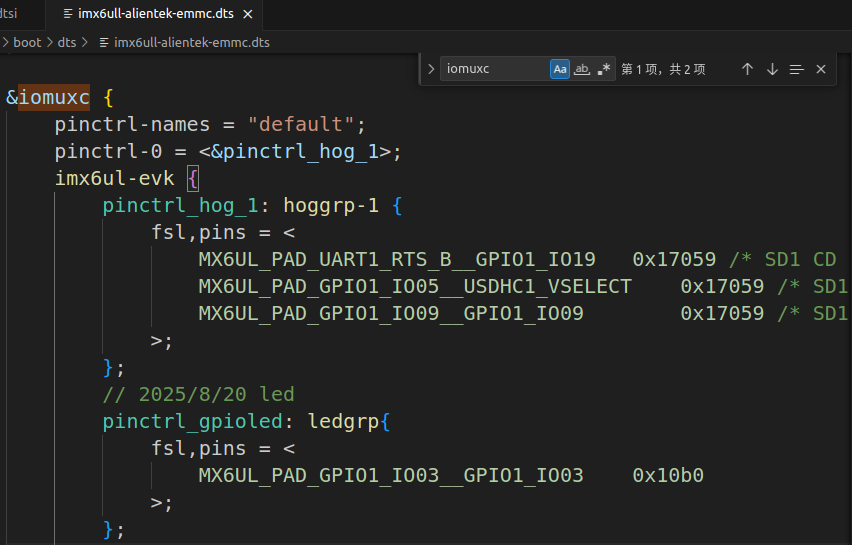
② 在imx6ull-alientek-emmc.dts文件中找到&iomuxc节点,在里面的imx6ul-evk里加入新的pinctrl:
bash
pinctrl_gpioled: ledgrp{
fsl,pins = <
MX6UL_PAD_GPIO1_IO03__GPIO1_IO03 0x10b0
>;
};
③ 编译、复制到tftproot,然后重启开发板:
bash
make dtbs
sudo cp arch/arm/boot/dts/imx6ull-alientek-emmc.dtb /.../tftpboot/ -f4.2.4 驱动 leddriver.c
代码内容基本与Linux驱动开发笔记(六)3.2.2一致,只是添加了platform_driver相关代码。并将驱动入口函数的内容移到probe函数中、将驱动出口函数的内容移到remove函数中。
cpp
#include <linux/module.h>
#include <linux/platform_device.h>
#include <linux/of.h>
#include <linux/of_device.h>
#include <linux/mod_devicetable.h>
#include <linux/kernel.h>
#include <linux/init.h>
#include <linux/fs.h>
#include <linux/uaccess.h>
#include <linux/cdev.h>
#include <linux/device.h>
#include <linux/of_gpio.h>
/* LED状态 */
#define LEDOFF 0
#define LEDON 1
#define PLATFORM_NAME "platled" // 设备名
#define PLATFORM_COUNT 1 // led设备数量
/////////////////////////////////////////////////////
/* 设备结构体 */
struct newchrled_dev{
struct cdev cdev;
dev_t devid; /* 设备号 */
int major; /* 主设备号 */
int minor; /* 此设备号 */
struct class *class; /* 类 */
struct device *device; /* 设备 */
struct device_node *nd;
int led_gpio;
};
struct newchrled_dev newchrled; /* led设备 */
/////////////////////////////////////////////////////
static ssize_t newchrled_write(struct file *filp, const char __user *buf, size_t count, loff_t *ppos){
int ret;
unsigned char databuf[1];
struct newchrled_dev *dev = filp->private_data;
ret = copy_from_user(databuf, buf, count);
if(ret < 0){
return -EINVAL;
}
if(databuf[0] == LEDON){ //开灯
gpio_set_value(dev->led_gpio, 0); // 低电平开灯
} else if(databuf[0] == LEDOFF){
gpio_set_value(dev->led_gpio, 1); // 高电平关灯
}
return 0;
}
static int newchrled_open(struct inode *inode, struct file *filp){
filp->private_data = &newchrled;
return 0;
}
static int newchrled_release(struct inode *inode, struct file *filp){
return 0;
}
/* 字符设备操作集合 */
static const struct file_operations newchrled_fops = {
.owner = THIS_MODULE,
.write = newchrled_write,
.open = newchrled_open,
.release = newchrled_release,
};
///////////////////////////////////////////////////////
// 匹配成功就会执行probe
static int led_probe(struct platform_device *dev){
printk("led probe\r\n");
int ret = 0;
/* 1.注册字符设备驱动 */
newchrled.devid = 0;
if(newchrled.devid){
newchrled.devid = MKDEV(newchrled.devid, 0);
register_chrdev_region(newchrled.devid, PLATFORM_COUNT, PLATFORM_NAME);
} else {
alloc_chrdev_region(&newchrled.devid, 0, PLATFORM_COUNT, PLATFORM_NAME);
newchrled.major = MAJOR(newchrled.devid);
newchrled.minor = MINOR(newchrled.devid);
}
/* 2.初始化cdev */
newchrled.cdev.owner = THIS_MODULE;
cdev_init(&newchrled.cdev, &newchrled_fops);
/* 3.添加cdev */
cdev_add(&newchrled.cdev, newchrled.devid, PLATFORM_COUNT); // 错误处理先略过了
/* 4.创建类 */
newchrled.class = class_create(THIS_MODULE, PLATFORM_NAME);
if(IS_ERR(newchrled.class)){
return PTR_ERR(newchrled.class);
}
/* 5.创建设备 */
newchrled.device = device_create(newchrled.class, NULL, newchrled.devid, NULL, PLATFORM_NAME);
if(IS_ERR(newchrled.device)){
return PTR_ERR(newchrled.device);
}
/* 1.获取设备节点 */
// newchrled.nd = of_find_node_by_path("/gpioled"); // 找到刚才在imx6ull-alientek-emmc.dts根节点下加入的gpioled节点
// if(newchrled.nd == NULL){
// ret = -EINVAL;
// goto fail_findnode;
// }
newchrled.nd = dev->dev.of_node;
// platform_device类型中的device结构体成员中已经包括了of_node(device_node类型)
// 可以直接读取,不需要再手动寻找of_find_node_by_path
/* 2.获取LED对应的GPIO */ // 也就是节点中led-gpios那一行内容
newchrled.led_gpio = of_get_named_gpio(newchrled.nd, "led-gpios", 0);
if(newchrled.led_gpio < 0){
printk("can't find led_gpio\r\n");
ret = -EINVAL;
goto fail_findnode;
}
printk("led_gpio num = %d\r\n",newchrled.led_gpio);
/* 3.申请IO */
ret = gpio_request(newchrled.led_gpio, "led-gpios");
if(ret){
printk("Failed to request the led gpio\r\n");
ret = -EINVAL;
goto fail_findnode;
}
/* 4.使用IO,设置为输出 */
ret = gpio_direction_output(newchrled.led_gpio, 1);
if(ret){
goto fail_setoutput; // 如果代码走到这一步,一定已经成功进行了IO申请,因此这里错误处理时需要释放IO
}
/* 5.输出高电平,关灯 */
gpio_set_value(newchrled.led_gpio, 1);
return 0;
fail_setoutput:
gpio_free(newchrled.led_gpio);
fail_findnode:
return ret;
}
static int led_remove(struct platform_device * dev){
printk("led remove\r\n");
gpio_set_value(newchrled.led_gpio, 1); // 高电平 关灯
/* 注销字符设备驱动 */
cdev_del(&newchrled.cdev);
unregister_chrdev_region(newchrled.devid, PLATFORM_COUNT);
device_destroy(newchrled.class, newchrled.devid);
class_destroy(newchrled.class);
gpio_free(newchrled.led_gpio);
return 0;
}
static const struct of_device_id led_of_match[] = {
{.compatible = "alientek,gpioled"}, // 要和新增的设备数节点gpio中的compatible匹配
{ /* sentinel */ }, // 哨兵元素
// 后面可以接更多的{.compatible = "............"}
};
// platform驱动结构体
static struct platform_driver led_driver = {
.driver = {
.name = "imx6ull_led", // 无设备树时使用name与设备进行匹配
.of_match_table = led_of_match, // 有设备树时进行匹配
},
.probe = led_probe,
.remove = led_remove,
};
///////////////////////////////////////////////////////////////////
// 加载驱动
static int __init leddriver_init(void){
return platform_driver_register(&led_driver);
}
// 卸载驱动
static void __exit leddriver_exit(void){
platform_driver_unregister(&led_driver);
}
module_init(leddriver_init);
module_exit(leddriver_exit);
MODULE_LICENSE("GPL");4.2.5 应用程序newchrledAPP.c
newchrledAPP.c与4.1.5完全一致。
cpp
#include<stdio.h>
#include<unistd.h>
#include<sys/types.h>
#include<sys/stat.h>
#include<fcntl.h>
#include<stdlib.h>
#include<string.h>
/*
* @description : main主程序
* @param - argc : argv数组元素个数
* @param - argv : 具体参数
* @return : 0 成功; else失败
* 调用 ./newchrledAPP <filename> <0:1> 0关灯,1开灯
* ./newchrledAPP /dev/platled 0 关灯
* ./newchrledAPP /dev/platled 1 开灯
*/
#define LEDOFF 0
#define LEDON 1
int main(int argc, char *argv[]){
if(argc != 3){ // 判断用法是否错误
printf("Error Usage!\r\n");
return -1;
}
char *filename;
int fd = 0;
unsigned char databuf[1];
int retvalue = 0;
filename = argv[1];
fd = open(filename, O_RDWR); // 读写模式打开驱动文件filename
if(fd <0){
printf("file %s open failed!\r\n");
return -1;
}
databuf[0] = atoi(argv[2]); // char 2 int
retvalue = write(fd, databuf, sizeof(databuf)); // 缓冲区数据写入fd
if(retvalue <0){
printf("LED Control Failed!\r\n");
close(fd);
return -1;
}
close(fd);
return 0;
}4.6.测试
首先检查设备树中是否有我们新增的goioled节点,并查看其compatible信息:
bash
ls /sys/firmware/devicetree/base/ # 应当能找到gpioled节点
cat /sys/firmware/devicetree/base/gpioled/compatible # 应当显示alientek,gpioled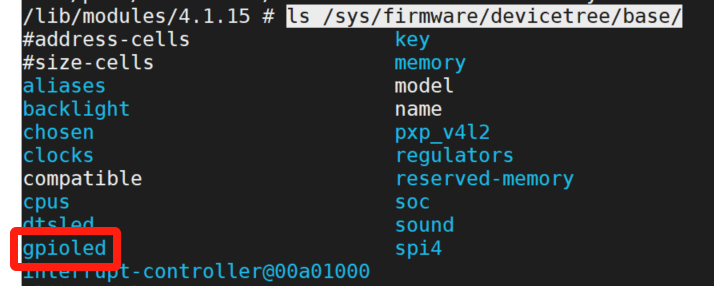

bash
# VSCODE终端
make
arm-linux-gnueabihf-gcc newchrledAPP.c -o newchrledAPP
sudo cp leddriver.ko newchrledAPP /.../linux/nfs/rootfs/lib/modules/4.1.15/
# 串口
cd /lib/modules/4.1.15/
depmod
modprobe leddriver.ko # 此时应输出led probe,说明匹配成功
./newchrledAPP /dev/platled 1 # 开灯
./newchrledAPP /dev/platled 0 # 关灯
rmmod leddriver.ko # 此时应输出led remove