基于方向谱与雷达信号处理的海杂波机理解析
前言
海杂波(sea clutter)指雷达在海面掠射或俯视条件下接收到的由海浪/涌浪产生的强散射回波。它不仅决定了海上探测的可探测性、虚警概率与恒虚警算法(CFAR)的门限设置,也直接影响弱小目标(小艇、海面低慢小无人机的海面散射分量、海鸟等)的检测性能。
1 海面起伏与方向谱建模
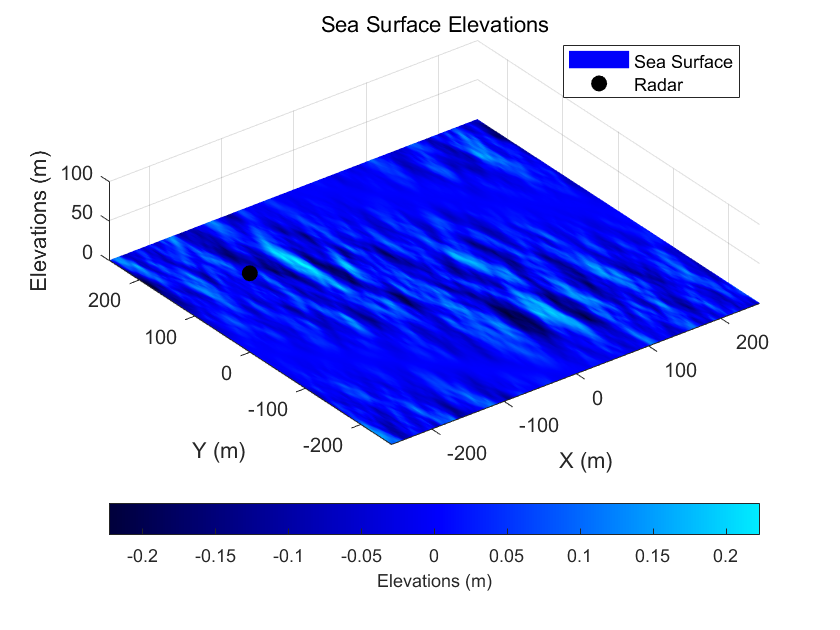
1.1 海面高度场的随机叠加模型
在频域合成思想下,海面高度场 z(x,y,t)z(x,y,t)z(x,y,t) 可表示为各个空间波数分量的叠加:
z(x,y,t)=∑kx,ky2,Φ(kx,ky)ΔkxΔkycos(k⋅r−ω(∣∣k∣∣)t+φk). z(x,y,t)=\sum_{k_x,k_y}\sqrt{2,\Phi(k_x,k_y)\Delta k_x\Delta k_y} \cos\big(\mathbf{k}\cdot\mathbf{r}-\omega(||\mathbf{k}||)t+\varphi_{\mathbf{k}}\big). z(x,y,t)=kx,ky∑2,Φ(kx,ky)ΔkxΔky cos(k⋅r−ω(∣∣k∣∣)t+φk).
-
x,yx,yx,y:水平坐标(m)。
-
ttt:时间(s)。
-
r=x,yT\mathbf{r}=x,y^{\mathrm T}r=x,yT:位置向量。
-
k=kx,kyT\mathbf{k}=k_x,k_y^{\mathrm T}k=kx,kyT,∣k∣=K=kx2+ky2|\mathbf{k}|=K=\sqrt{k_x^2+k_y^2}∣k∣=K=kx2+ky2 :二维波数与其模长(rad/m)。
-
Φ(kx,ky)\Phi(k_x,k_y)Φ(kx,ky):二维方向谱 (单位:m3/rad2m^3/rad^2m3/rad2),刻画各波数方向上的能量分布。
-
Δkx,Δky\Delta k_x,\Delta k_yΔkx,Δky:波数格点间隔(rad/m)。
-
ω(K)\omega(K)ω(K):角频率(rad/s),由色散关系确定。
-
φk\varphi_{\mathbf{k}}φk:随机相位,均匀分布于 [0,2π)[0,2\pi)[0,2π)。
该模型保证在适当的谱与色散关系下,海面是 平稳、各向不均匀(随风向) 的随机过程。
1.2 重力---毛细波色散关系
深水条件下,重力---毛细波的角频率与波数满足
ω(K)=gK+γK3. \omega(K)=\sqrt{gK+\gamma K^3}. ω(K)=gK+γK3 .
-
ggg:重力加速度m/s2m/s^2m/s2,通常取 (9.81)。
-
γ=σ/ρ\gamma=\sigma/\rhoγ=σ/ρ:毛细项系数m3/s2m^3/s^2m3/s2,σ\sigmaσ 为水的表面张力N/mN/mN/m,ρ\rhoρ 为水密度kg/m3kg/m^3kg/m3。
-
KKK:波数模长(rad/m)。
式中前项gKgKgK 主导长波(重力波),后项 γK3\gamma K^3γK3 主导短波(毛细波)。
1.3 方向谱:Phillips 型与方向展布
为简洁起见,常用经验证有效的 Phillips 型基谱并叠加方向展布与高波数衰减:
Φ(kx,ky)=S0(K)D(θ)T(K), \Phi(k_x,k_y)=S_0(K)D(\theta)T(K), Φ(kx,ky)=S0(K)D(θ)T(K),
其中
S0(K)=Aexp(−1K2L2)K4,D(θ)=cossθI(cosθ≥0),T(K)=exp(−(KKh)2). S_0(K)=A\frac{\exp\big(-\tfrac{1}{K^2L^2}\big)}{K^4},\quad D(\theta)=\cos^s\theta\mathbb{I}({\cos\theta\ge 0}),\quad T(K)=\exp\big(-(\tfrac{K}{K_h})^2\big). S0(K)=AK4exp(−K2L21),D(θ)=cossθI(cosθ≥0),T(K)=exp(−(KhK)2).
-
AAA:谱强度常数(与风速/海况相关)。
-
LLL:与10 m高度风速 U10U_{10}U10 相关的尺度(m),经验地 L∼U102/gL\sim U_{10}^2/gL∼U102/g。
-
KhK_hKh:高波数截断(rad/m),抑制过多的短波能量。
-
θ\thetaθ:波数方向与风向夹角(rad)。
-
sss:方向展布指数(无量纲),风速越大,取值可越大(指向性越强)。
-
I⋅\mathbb{I}{\cdot}I⋅:指示函数,限定顺风半空间(避免与风向相反的波)。
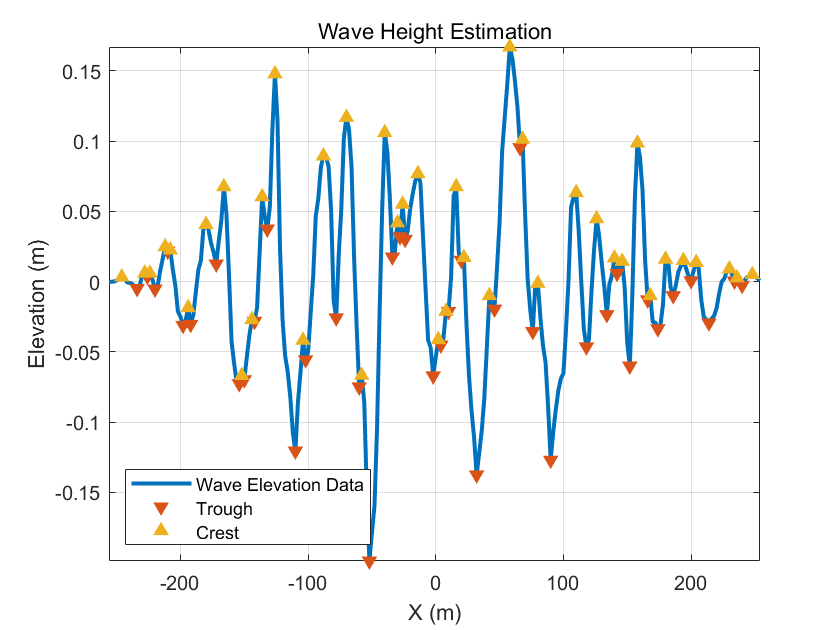
1.4 显著波高与谱矩
显著波高(Significant Wave Height, SWH) 在谱表示中常近似为
Hs≈4m0,m0=∬Φ(kx,ky)dkxdky, H_s \approx 4\sqrt{m_0},\qquad m_0=\iint \Phi(k_x,k_y)\mathrm{d}k_x\mathrm{d}k_y, Hs≈4m0 ,m0=∬Φ(kx,ky)dkxdky,
-
HsH_sHs:显著波高mmm。
-
m0m_0m0:零阶谱矩m2m^2m2。
该式将方向谱能量与"宏观海况强度"建立联系。
2 雷达---海面几何与回波形成
2.1 俯视几何与主瓣脚印
雷达高度为 (h),俯仰俯角为 (\psi)(相对水平面向下为正),主瓣方位 3 dB 波束宽度为 (\beta)。则波束中心斜距 近似
R0=hsinψ, R_0=\frac{h}{\sin\psi}, R0=sinψh,
-
R0R_0R0:波束中心到海面交会处的斜距(m)。
-
hhh:雷达高程(m)。
-
ψ\psiψ:俯角(rad)。
主瓣在该斜距处的横向(方位)宽度近似
Waz≈R0tanβ2. W_{\text{az}}\approx R_0 \tan\frac{\beta}{2}. Waz≈R0tan2β.
-
WazW_{\text{az}}Waz:主瓣横向 3 dB 宽度(m)。
-
β\betaβ:方位波束宽度(rad)。
2.2 雷达方程与散射单元
将海面离散为面积 ΔA\Delta AΔA 的小面元,采用等效雷达散射截面密度 (NRCS)σ0\sigma_0σ0 模型,则第 kkk 个面元对接收端的复包络贡献可写为
ak=σ0ΔARk2ejϕk,τk=2Rkc. a_k=\frac{\sqrt{\sigma_0\Delta A}}{R_k^{2}}e^{j\phi_k}, \qquad \tau_k=\frac{2R_k}{c}. ak=Rk2σ0ΔA ejϕk,τk=c2Rk.
-
aka_kak:第 kkk 面元的复散射幅度(线性幅值)。
-
σ0\sigma_0σ0:NRCS(无量纲,线性域)。
-
ΔA\Delta AΔA:面元面积m2m^2m2。
-
RkR_kRk:雷达到该面元的斜距mmm。
-
ϕk\phi_kϕk:随机相位radradrad。
-
τk\tau_kτk:往返传播时延sss。
-
ccc:光速m/sm/sm/s。
总回波(基带) 是所有面元经传播时延后的叠加:
r(t)=∑kakstx(t−τk), r(t)=\sum_k a_ks_{\text{tx}}(t-\tau_k), r(t)=k∑akstx(t−τk),
-
r(t)r(t)r(t):接收端基带回波(复包络)。
-
stx(t)s_{\text{tx}}(t)stx(t):发射基带脉冲(复包络)。
2.3 线性调频脉冲与匹配滤波
发射端常用线性调频(LFM)脉冲
stx(t)=exp(jπμ(t−T2)2)I(0≤t<T), s_{\text{tx}}(t)=\exp\big(j\pi\mu (t-\tfrac{T}{2})^2\big)\mathbb{I}({0\le t<T}), stx(t)=exp(jπμ(t−2T)2)I(0≤t<T),
-
TTT:脉冲宽度(s)。
-
BBB:调频带宽(Hz)。
-
μ=B/T\mu=B/Tμ=B/T:调频率(Hz/s)。
-
I(⋅)\mathbb{I}({\cdot})I(⋅):脉冲门限函数。
其匹配滤波输出
y(τ)=∫r(t)stx∗(t−τ)dt, y(\tau)=\int r(t)s_{\text{tx}}^*(t-\tau)\mathrm{d}t, y(τ)=∫r(t)stx∗(t−τ)dt,
-
y(τ)y(\tau)y(τ):匹配滤波输出(复包络,延时 τ\tauτ 的函数)。
-
(⋅)∗(\cdot)^*(⋅)∗:复共轭。
匹配滤波后,距离分辨率近似为
ΔR=c2B. \Delta R=\frac{c}{2B}. ΔR=2Bc.
-
ΔR\Delta RΔR:距离向分辨率(m)。
-
BBB:带宽(Hz)。
3 海杂波的多普勒与时频表征
3.1 面元径向速度与多普勒
海面在重力---毛细波作用下产生轨道运动。每个散射面元的径向速度 vr,kv_{r,k}vr,k 使回波产生多普勒频移
fd,k=2vr,kλ, f_{d,k}=\frac{2 v_{r,k}}{\lambda}, fd,k=λ2vr,k,
-
fd,kf_{d,k}fd,k:第 kkk 面元的多普勒(Hz)。
-
vr,kv_{r,k}vr,k:径向速度(m/s)。
-
λ=c/fc\lambda=c/f_cλ=c/fc:波长(m),fcf_cfc 为载频(Hz)。
反之,常把频率映射为速度
v=λ2fd. v=\frac{\lambda}{2}f_d . v=2λfd.
-
vvv:等效径向速度m/sm/sm/s。
-
fdf_dfd:多普勒频率HzHzHz。
3.2 短时傅里叶变换(STFT)
序列 xnxnxn 的 STFT 定义为
X(m,n)=∑p=0L−1xn+pwpe−j2πmp/L, X(m,n)=\sum_{p=0}^{L-1} xn+pwp e^{-j2\pi m p/L}, X(m,n)=p=0∑L−1xn+pwpe−j2πmp/L,
-
X(m,n)X(m,n)X(m,n):第 nnn 个时间窗、第 mmm 个频率格点的 STFT 系数(复数)。
-
wpwpwp:长度为 LLL 的窗函数(如汉宁窗),0≤p<L0\le p<L0≤p<L。
-
LLL:窗长(点数)。
-
nnn:时间索引(以"跳步" HHH 递增,HHH 为步进)。
-
mmm:频率索引(0≤m<L−1)(0\le m<L-1)(0≤m<L−1)。
对匹配滤波输出某一距离单元随脉冲序号的序列做 STFT,可得到速度---时间谱图 ,常用于观察海杂波的缓慢起伏 与随机快变。
4 海杂波幅度统计模型
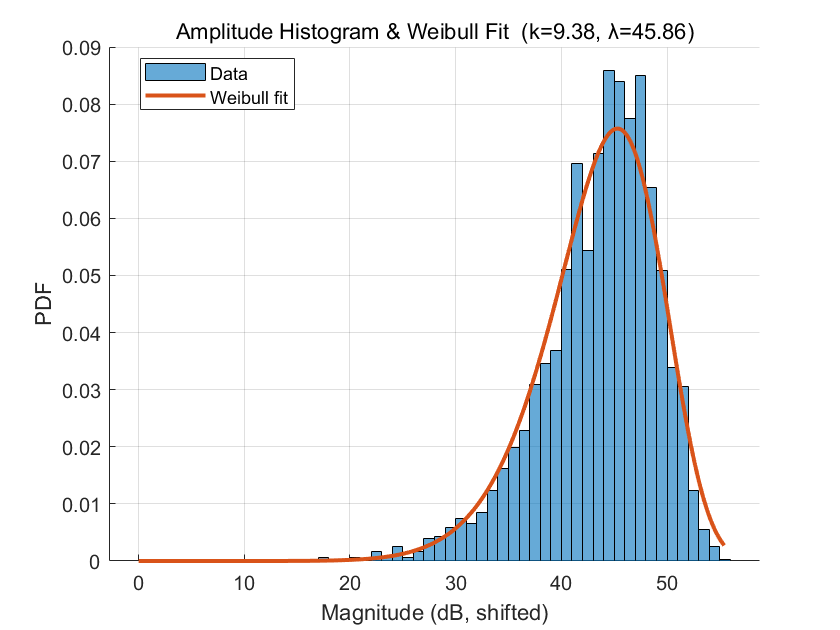
4.1 Weibull 分布(工程近似)
海杂波幅度(或强度)的边缘统计在中高分辨率下,常可用 Weibull 分布近似:
pA(a)=kλ(aλ)k−1exp−(aλ)k,a≥0. p_A(a)=\frac{k}{\lambda}\Big(\frac{a}{\lambda}\Big)^{k-1} \exp\Big-\\Big(\\frac{a}{\\lambda}\\Big)\^{k}\\Big,\quad a\ge 0 . pA(a)=λk(λa)k−1exp−(λa)k,a≥0.
-
pA(a)p_A(a)pA(a):幅度随机变量 AAA 的概率密度函数(1/幅度单位)。
-
k>0k>0k>0:形状参数(无量纲),控制尾部厚度。
-
λ>0\lambda>0λ>0:尺度参数(与均值/方差有关)。
-
aaa:幅度取值(线性域)。
对数域(dB)展示时,经
AdB=20log10A A_{\mathrm{dB}}=20\log_{10} A AdB=20log10A
-
AdBA_{\mathrm{dB}}AdB:幅度的 dB 值(dB)。
-
AAA:线性幅度(同上)。
4.2 其它常见模型(简述)
-
K 分布 :当回波为散斑_目标强度_慢变的乘性模型时适用,重尾更显著。
-
对数正态:在若干叠加与乘性效应下的经验近似。
-
复高斯:当散射面元数目很大且相位均匀、满足中心极限定理时,复包络趋于高斯。
不同雷达配置与海况下,经验上 Weibull/K/对数正态会呈现不同的拟合优劣,需要基于实测或高保真仿真进行模型选择与参数估计。
个人开源代码链接:https://github.com/hjHe-ee/Sea-clutter-simulation
总结
本文以"移动海面回波仿真"的典型处理链为参考,从方向谱建模 、重力---毛细波色散 、雷达---海面几何与回波形成 、匹配滤波与时频分析 到海杂波统计建模系统梳理了海杂波的关键机理。