导读
在放射治疗领域,毫米级的误差可能意味着健康组织受损或肿瘤漏照。随着放疗技术日益精进,对患者体位验证与实时监控的需求也达到了前所未有的高度。传统的光学表面成像系统在精度、抗干扰性及复杂曲面适应性方面面临挑战。本文将深入探讨基于高精度双目散斑3D相机的视觉定位系统如何革新放疗定位流程,提升治疗的安全性与有效性。
一、临床痛点:精准放疗的"最后一厘米"难题
放射治疗(放疗)的核心目标是将高剂量辐射精准投照至肿瘤区域,同时最大限度保护周围正常组织。精准放疗流程中,患者体位管理是关键瓶颈:
1)计划与执行的鸿沟
治疗计划基于CT/MRI影像制定,但治疗时患者实际体位难以与计划体位完美吻合。
2)分次治疗间的偏移
多次放疗间,患者体重变化、器官位移等因素导致体位不一致。
3)治疗过程中的移动
即使初始摆位精准,呼吸、无意识移动也会造成治疗中靶区位移。
4)传统方法的局限
激光灯、皮肤标记点依赖经验且精度有限;基于体表光学的系统易受环境光干扰,对复杂曲面适应性差。
后果: 体位偏差导致剂量分布偏离计划,降低肿瘤控制率或增加正常组织并发症风险。
二、技术利器: 高精度双目散斑3D相机核心优势
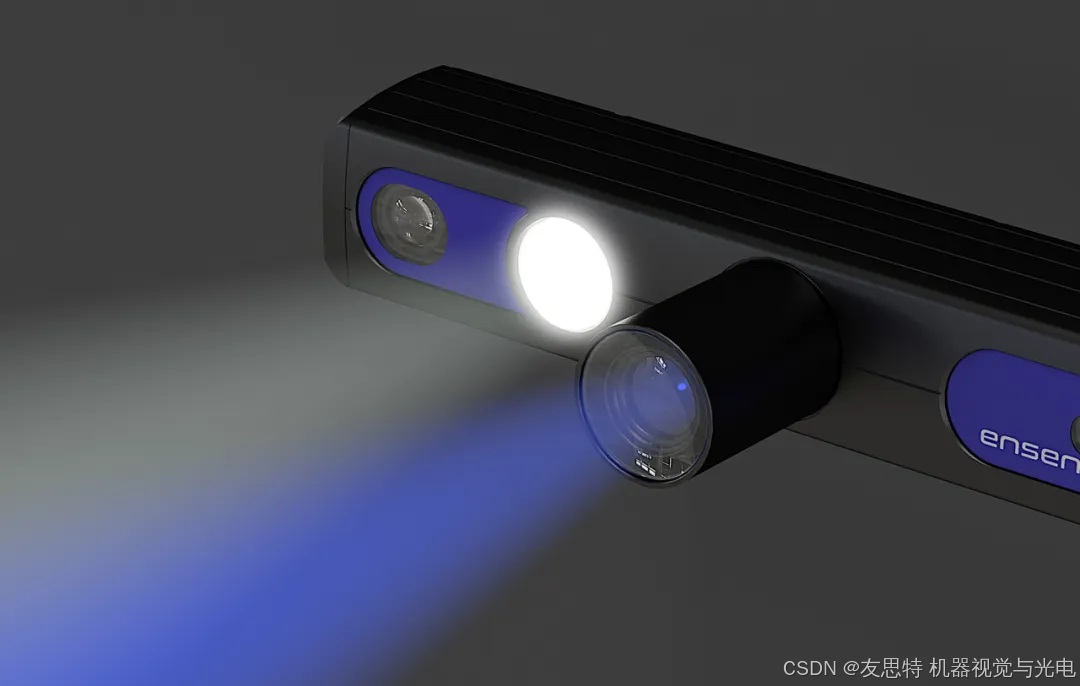
双目散斑3D相机技术凭借其独特原理,成为解决放疗定位痛点的理想选择。其核心工作流程是:主动向目标区域投射高密度、高对比度的激光散斑图案,两个经过高精度标定的相机从不同角度同步捕捉被物体表面调制后的散斑图像,最后基于三角测量原理及先进的立体匹配算法(利用散斑图案的唯一性特征),快速计算生成物体表面高密度的三维点云坐标。
该技术应用于放疗定位的显著优势
1)卓越精度与鲁棒性
其核心价值在于提供亚毫米级(通常优于0.1mm @1m) 的高精度表面点云,远超传统光学方法,满足放疗毫米级定位的严苛需求。同时,主动投射的特定散斑图案赋予其极强的抗干扰能力,能有效克服手术室/治疗室内复杂环境光(如无影灯、治疗室照明)的影响,确保在真实临床环境中可靠运行。
2)无标记、全场高速动态捕捉
系统采用非接触式测量,无需粘贴皮肤标记点,直接获取患者体表完整三维形貌,避免了额外操作带来的繁琐和患者不适。单次拍摄即可覆盖整个感兴趣区域(如胸腹部、头颈部),提供高分辨率(500万像素分辨率) 的丰富细节。最高帧率可达30fps,能够实时捕捉呼吸等动态运动,实时进行三维成像,为治疗中监控提供可能。
3)优异的曲面适应性
该技术对皮肤、体模等复杂非规则曲面具有出色的重建能力,能够真实、完整地反映患者体表形貌信息,克服了传统方法在此方面的局限。
4)提供免费SDK用于多台3D相机视野融合
对于需要大视野覆盖时,单相机视野不足以满足项目需求,可以通过软件UI界面所集成的多相机标定融合功能,将多台相机的视野统一到同一坐标系下,实现视野的扩展,为开发者应用提供了极大的便利性。
三、系统构建:从3D数据到精准定位
基于双目散斑3D相机的放射治疗视觉定位系统架构清晰。硬件核心是高精度双目散斑3D相机模组,通常安装在治疗床两侧或上方机架,其视野需覆盖患者治疗区域。关键性能指标包括精度、分辨率、视野范围(FOV)、工作距离和帧率。设备需具备防撞、抗辐射(或易于屏蔽)的设计,安全集成于放疗机房环境,并由高性能计算单元负责实时数据处理。
核心的点云配准算法首先进行刚性配准,计算当前患者体表点云与计划CT影像外表面提取的参考点云(或首次治疗建立的参考表面模型)之间的最佳空间变换(平移+旋转),这是实现"计划体位"精准复现的基础。对于更高级的应用,可采用形变配准技术,处理因呼吸、器官运动或体重变化导致的非刚性形变,提供更精细的位移场信息。系统直观显示患者当前位置相对于参考位置的平移(ΔX, ΔY, ΔZ)和旋转(Roll, Pitch, Yaw)偏差。安全监控与报警功能设定位移阈值,实时监控治疗中患者移动。
一旦检测到位移超过安全阈值,立即触发声光报警并向加速器控制系统发送信号暂停照射。数据管理与报告模块自动记录每次治疗前的摆位误差数据、治疗中的运动轨迹, 并生成标准化质控报告, 为持续改进提供依据。

(放射医疗人体定位系统布局)
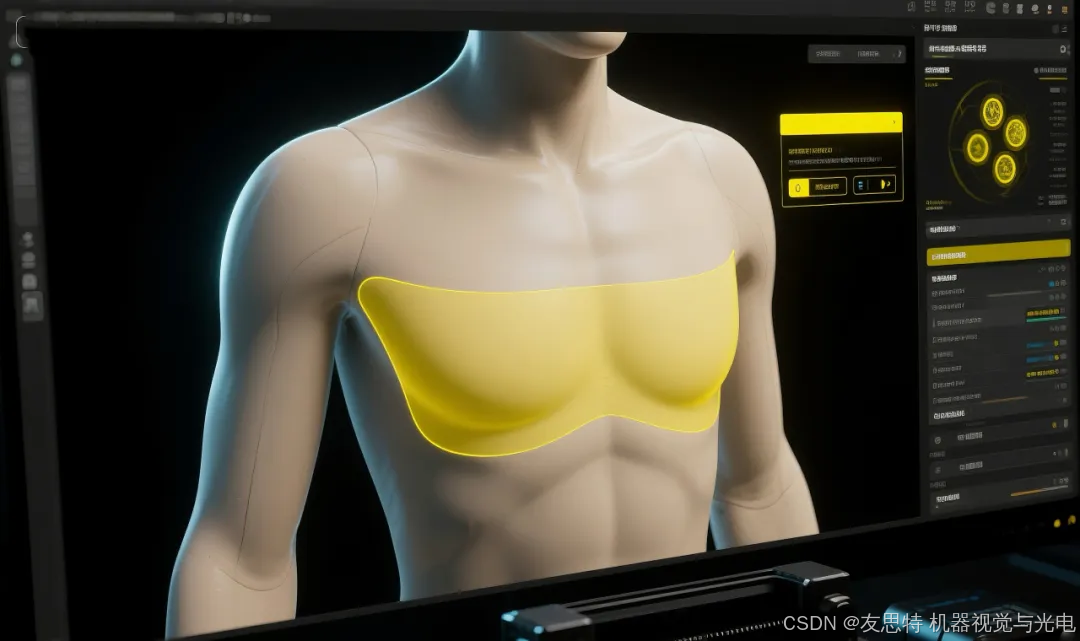
(人体胸部定位)
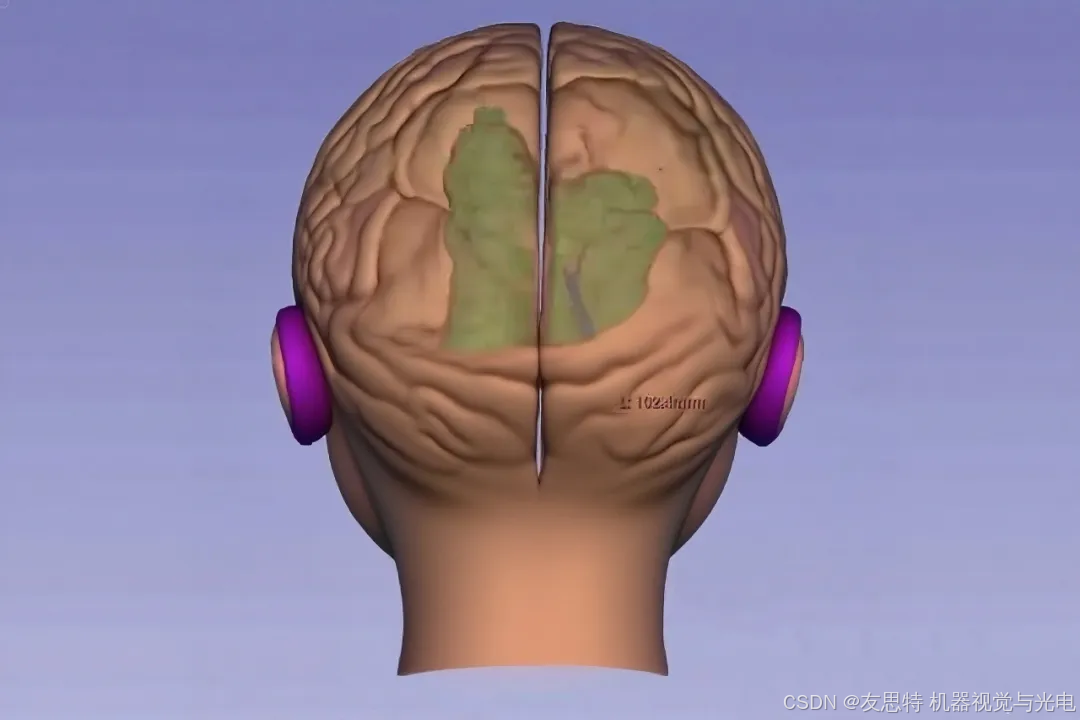 (人体脑颅三维定位)
(人体脑颅三维定位)
四、典型应用案例:精准放疗中的实践
某大型肿瘤医院放疗中心引入基于双目散斑3D相机的视觉定位系统(核心相机参数:精度±0.1mm @1m, FOV 900x866mm @1m),成功应用于鼻咽癌调强放疗(IMRT)患者体位管理。
患者在计划CT扫描时,同步使用3D相机采集其在固定装置(如热塑膜+头枕)下的体表(面部、颈部)点云,作为"参考表面模型"存入治疗计划系统(TPS)。
患者躺于治疗床并佩戴固定装置后,先利用室内激光进行初步摆位。随后启动3D视觉定位系统:相机快速拍摄患者当前体表并实时重建点云。系统在数秒内完成当前点云与TPS中参考模型的刚性配准。根据精确量化的指引,精细调整治疗床位置(平移和旋转),直至所有偏差值均小于预设阈值(如±1mm / ±1°)。治疗束流照射期间,系统持续运行(采用低剂量模式或间歇采样),实时监测患者体表位置。一旦检测到位移超过安全阈值,立即触发连锁机制暂停加速器照射,并通过声光报警提示。
应用优势:
1)精度与效率提升
系统辅助下,最终摆位残留误差可稳定控制在<1mm / <1°水平,远优于传统方法。配准计算快速直观,调整有明确量化依据,平均摆位时间缩短约40%。
2)治疗安全保障
实时运动监控功能有效捕捉治疗中无意识的移动(如咳嗽、轻微滑动),防止因位移导致的剂量偏差。实际记录显示,约15%的患者在单次治疗中触发了位移报警,凸显了该功能的重要性。
3)数据管理
系统自动记录的每次治疗前摆位误差及治疗中最大位移数据,为个体化治疗评估、固定装置优化及临床研究提供了客观、量化的坚实基础。
4)患者体验更舒适
无标记、无创的测量方式提升了患者的舒适度和治疗依从性。
展望与小结
高精度双目散斑3D相机技术为放射治疗提供了一种革命性的体表定位与监控方案。其融合了非接触、亚毫米精度、强抗干扰、全场高速动态测量等核心优势,有效突破了传统方法在精度、效率和可靠性上的瓶颈。通过深度集成于放疗全流程,该系统不仅大幅提升了初始摆位的精确度和效率,更通过实时动态监控为治疗安全构筑了坚实防线,同时积累了宝贵的客观量化质控数据。
随着技术的持续演进及其与自适应放疗、人工智能等前沿领域的协同创新,基于双目散斑3D相机的视觉定位系统将成为精准放疗体系中不可或缺的核心支柱,为提升肿瘤治疗效果和患者生存质量贡献关键力量。
友思特 Ensenso 3D立体相机
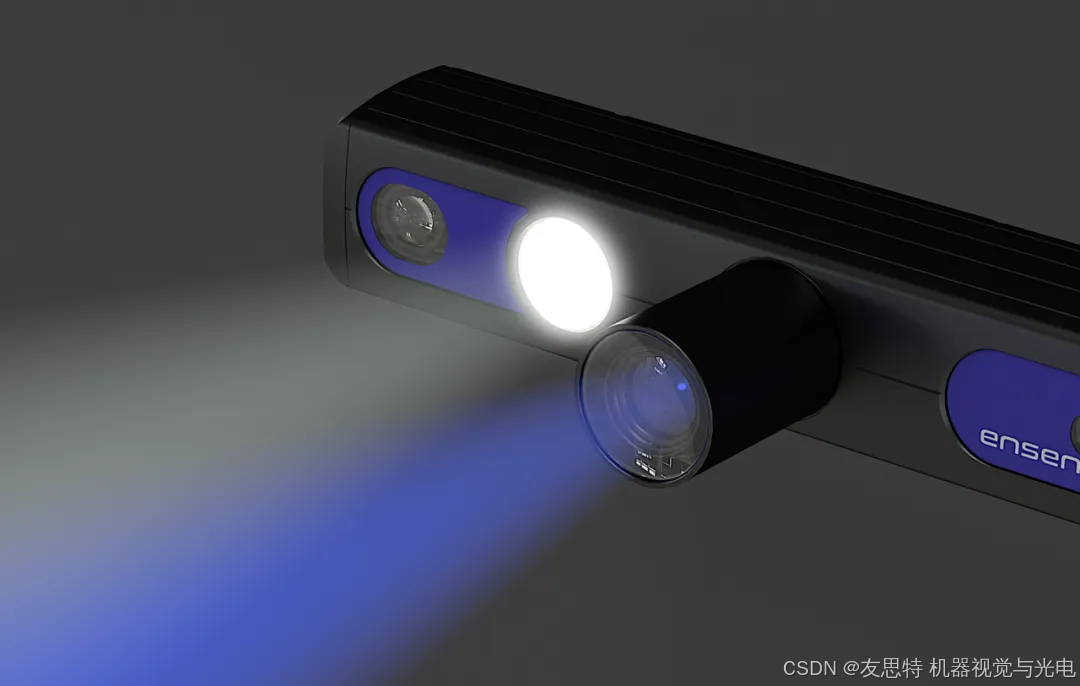 Ensenso 系列 3D工业相机 能够为各行各业的视觉检测项目提供实现快速、精准、低成本的3D图像捕捉。5个系列,多种外壳和工作距离型号可选,覆盖各类项目应用。采用核心专利技术FlexView,可以可靠地检测静止、移动物体,提供具有更高精度、可靠性、细致度的深度图像。
Ensenso 系列 3D工业相机 能够为各行各业的视觉检测项目提供实现快速、精准、低成本的3D图像捕捉。5个系列,多种外壳和工作距离型号可选,覆盖各类项目应用。采用核心专利技术FlexView,可以可靠地检测静止、移动物体,提供具有更高精度、可靠性、细致度的深度图像。