分为应用层和网络层
具体的分析参考一文搞懂UDS的各种时间参数 -- CN知EV
网络层
相关定义
| 参数 | 全称/描述 | 控制方 | 主要作用 | 默认值/范围 |
|---|---|---|---|---|
| N_As | 发送帧间分离时间 | 发送方 | 控制发送节奏,防止淹没总线 | 典型值:20ms |
| N_Ar | 接收帧间分离时间 | 接收方 | 检测传输超时 | 典型值:25ms |
| N_Bs | 流控制帧等待超时 | 发送方 | 防止无限等待流控制帧 | 典型值:1000ms |
| N_Br | 接收就绪时间 | 接收方 | 准备接收下一块数据的时间 | - |
| STmin | 最小分离时间 | 接收方 (通过FC帧) | 精确控制CF帧的流入速率 | 0-127ms (0x00-0x7F) |
| N_Cs | 客户端请求超时 | 客户端 (应用层) | 确保整个请求有响应 | 厂商定义 |
如图所示
1. N_As (发送帧间分离时间)
-
定义 :发送方在发送两个连续帧之间必须插入的最小时间间隔。
-
谁遵守 :发送方(无论是客户端还是服务器,谁发多帧谁遵守)。
-
用途:
-
防止发送方以过快的速度淹没总线,给其他报文和接收方的处理留出时间。
-
确保总线负载在可控范围内。
-
-
实际应用:发送方在发送完一个CF后,必须等待至少N_As时间,才能发送下一个CF。这个时间通常由CAN驱动或控制器硬件来保证。
2. N_Ar (接收帧间分离时间)
-
定义 :接收方在等待下一个连续帧 时,所允许的最大时间。
-
谁遵守 :接收方。
-
用途:
-
检测传输中断。如果接收方在收到一个CF之后,超过N_Ar时间还没有收到下一个CF,它就认为本次多帧传输失败。
-
随后,接收方会向上层报告一个超时错误(如
N_TIMEOUT_A),并丢弃已接收到的部分数据。
-
-
关系 :N_Ar > N_As。这很好理解,接收方的等待时间必须大于发送方的发送间隔,否则会误判为超时。
3. N_Bs (流控制帧等待超时)
-
定义 :发送方在发送首帧 之后,等待接收方回复流控制帧 的最大时间。
-
谁遵守 :发送方。
-
用途:
-
防止因为流控制帧丢失或接收方故障,导致发送方无限期地等待下去。
-
如果超过N_Bs时间仍未收到流控制帧,发送方将中止本次传输,并上报超时错误(如
N_TIMEOUT_Bs)。
-
-
值:这个值通常设置得较大(如1000ms),因为接收方可能需要一些时间来准备资源(如分配缓冲区)。
4. STmin (最小分离时间)
-
定义 :由接收方 通过流控制帧 动态告知发送方的、希望发送方遵守的最小连续帧间隔。
-
谁遵守 :发送方(必须遵守接收方的要求)。
-
用途:
-
接收方根据自身的处理能力、缓冲区状态和CPU负载,动态地控制数据流的输入速率。
-
如果接收方正在处理高优先级任务,可以通过增大STmin来降低诊断数据流入的速度。
-
-
实际间隔 :发送方最终采用的CF间隔是
max(N_As, STmin)。即取自身硬件限制和接收方要求中的较大值。-
例:
N_As = 5ms,STmin = 10ms-> 实际间隔为10ms。 -
例:
N_As = 5ms,STmin = 0ms-> 实际间隔为5ms。
-
5. N_Cs (客户端请求超时)
-
定义 :这是应用层和网络层的一个衔接点。指客户端 从发送完请求消息 到开始接收响应消息 的第一个帧(可以是SF, FF或FC)所等待的最大时间。
-
谁遵守 :客户端(诊断仪)。
-
用途:判断服务器(ECU)是否"活着"并对请求做出了响应。如果超时,诊断仪会报"无响应"错误
总结与工作流程
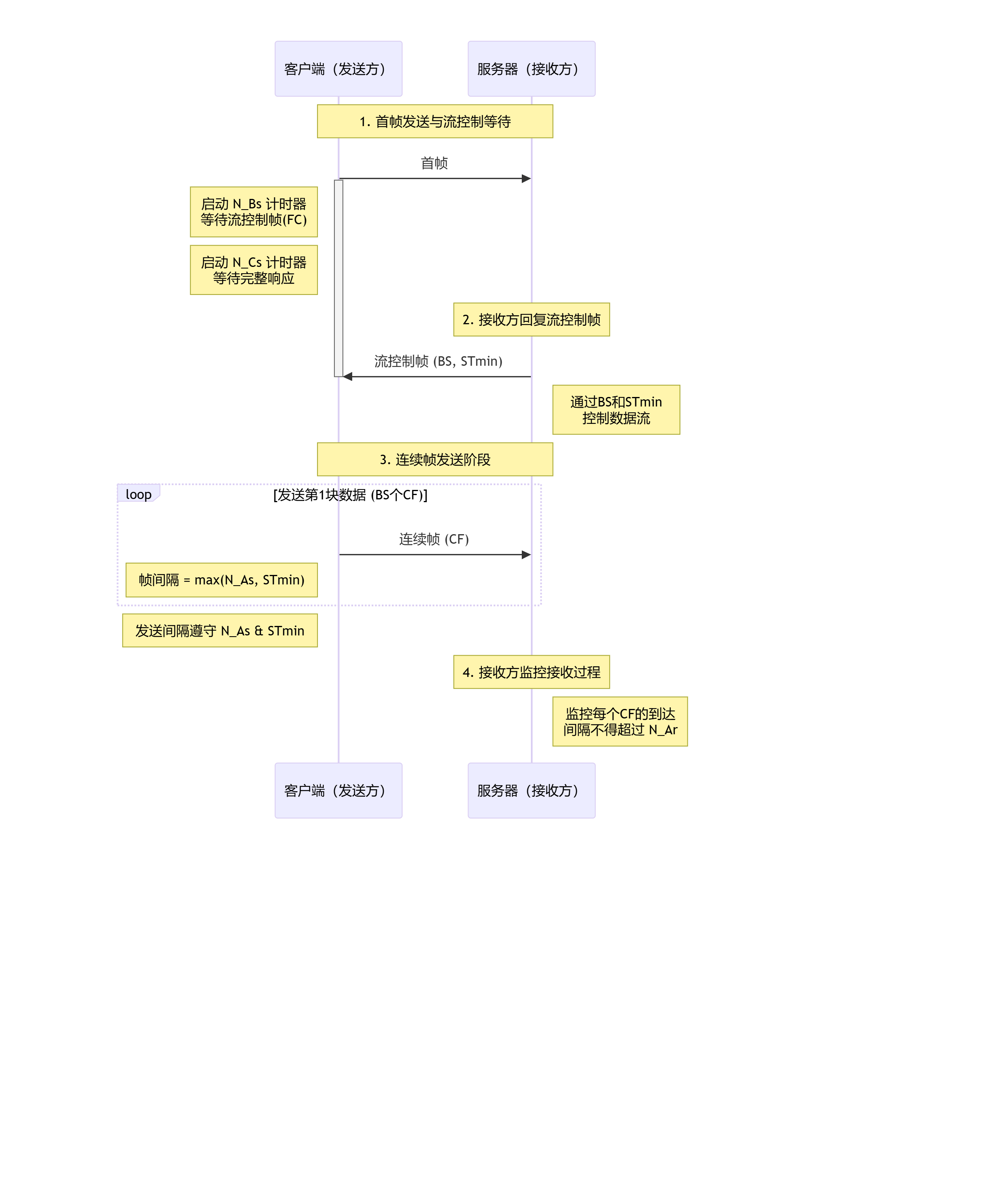
可以把这些时间参数想象成一场有序的对话:
-
发起请求 :客户端发送首帧(FF),并启动 N_Bs (等待对方说"请讲")和 N_Cs(等待对方完整回答)计时器。
-
流量调控 :服务器回复流控制帧(FC),其中包含 STmin("请以这个速度说")和BS("每次说这么多句")。
-
数据传输 :客户端以
max(N_As, STmin)的间隔("按我最快的能力或你要求的速度,取慢的那个")连续发送CF。服务器则用 N_Ar 来监控每一句是否及时到达("有没有卡壳?")。 -
流程重复:如果数据没发完,服务器会再次发送FC(流程回到第2步),直到所有数据发送完毕。
应用层
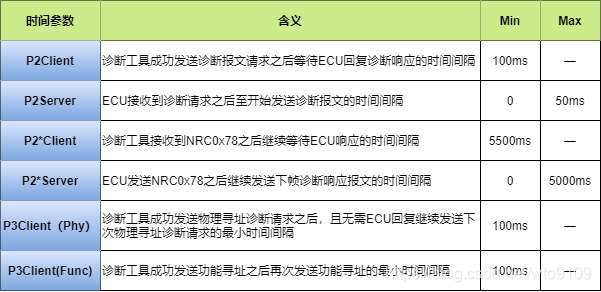
应用层时间参数
在ISO-15765-3标准中针对Tester以及Server列出了3对P时间参数,分别为*P2Client、P2Server、P2*Client、P2 Server、P3Client(Phy) 、P3Client(Func)。
为了较好的比较这六者之间的关系
原文链接:https://blog.csdn.net/wto9109/article/details/116176643