汽车行业机器视觉检测方案
系统概述
该解决方案基于C#与VisionPro开发,针对汽车制造中的产品尺寸检测、外观缺陷识别及机械手引导定位等需求设计。系统具备高精度、高稳定性及模块化特点,适用于生产线上实时检测与自动化控制。
核心功能模块
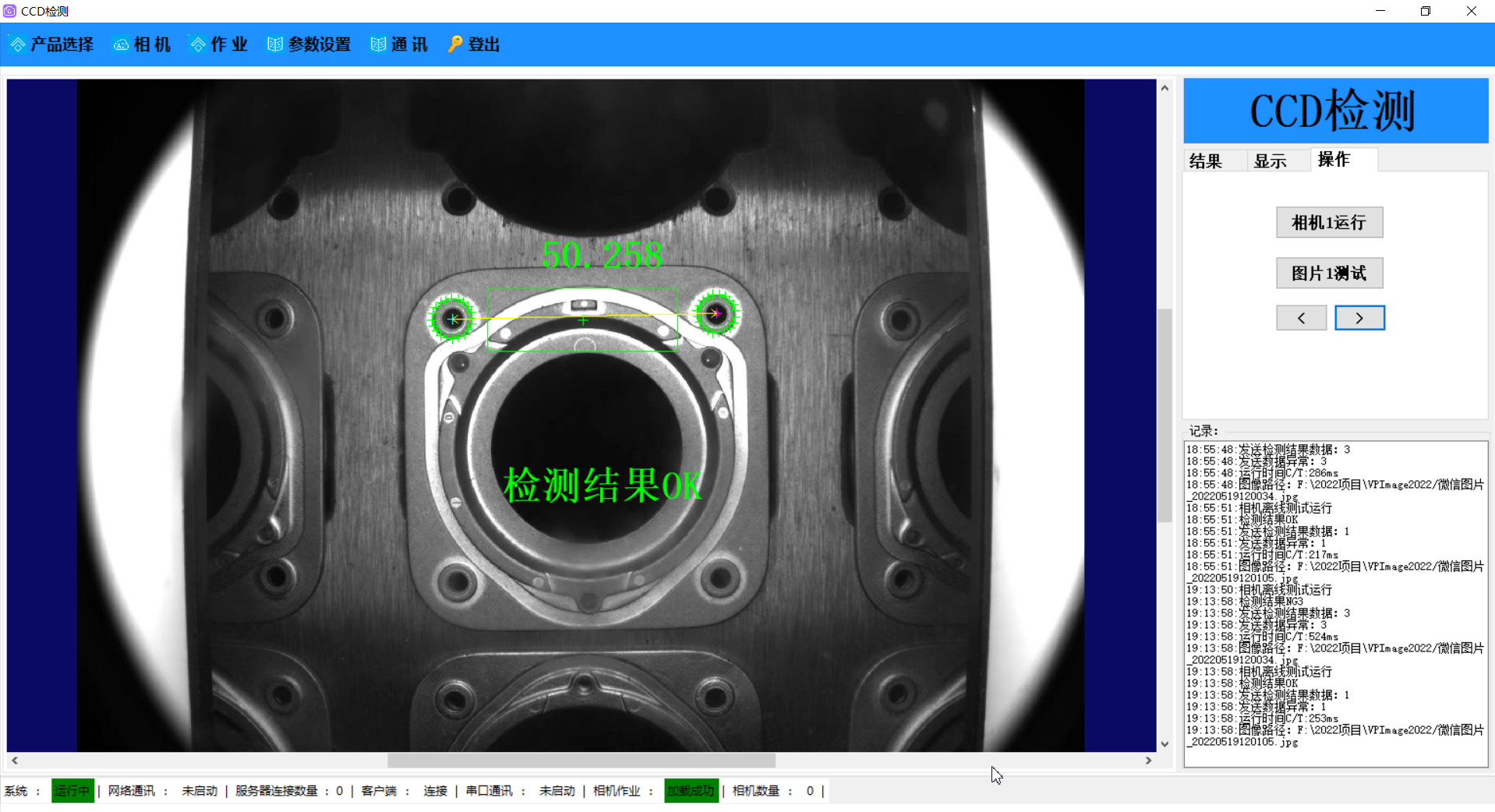
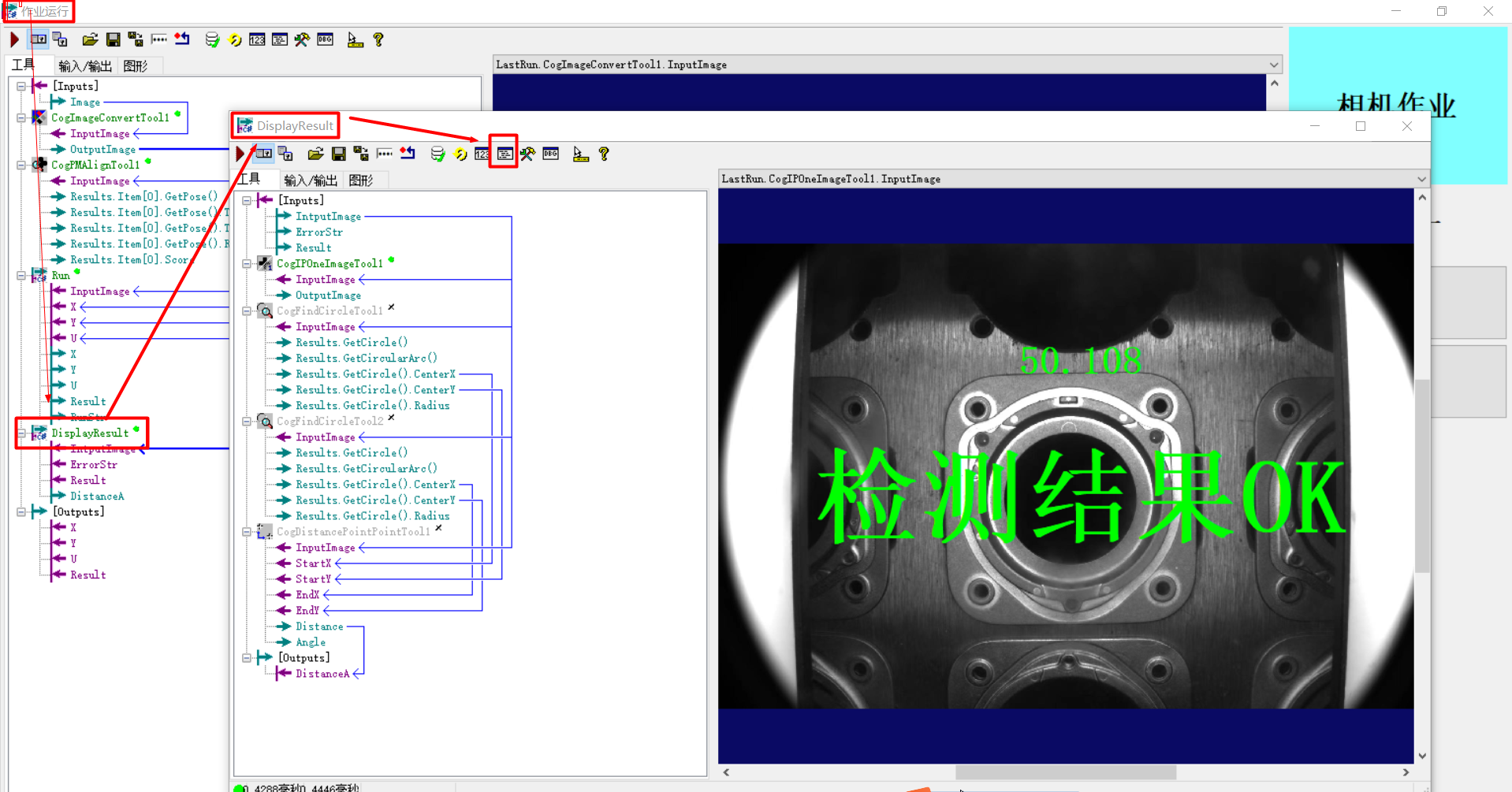
产品尺寸检测
采用VisionPro的Caliper工具与几何匹配算法,对汽车零部件的关键尺寸(如孔径、间距、轮廓)进行亚像素级测量。通过标定相机与工件的坐标系,确保检测精度达±0.02mm。
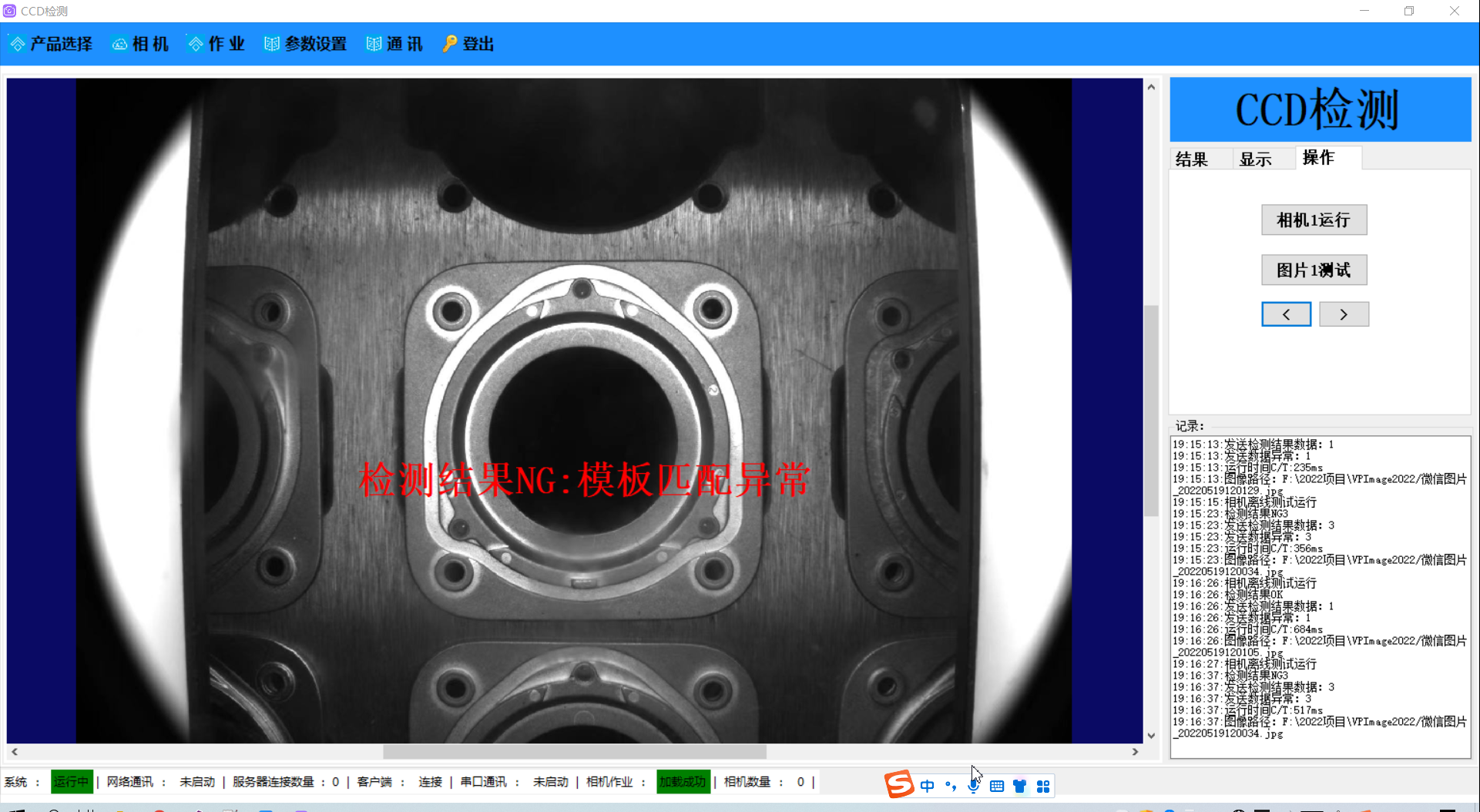
外观缺陷检测
结合Blob分析与纹理检测算法,识别划痕、凹陷、脏污等缺陷。采用多光源方案(如环形光、同轴光)增强成像对比度,缺陷检出率≥99.5%。
机械手引导定位
通过PatMax模式匹配定位工件特征点,输出坐标偏差至机械手控制系统。支持TCP/IP通信协议,实现与KUKA/FANUC等机械手的实时数据交互。
系统架构设计
硬件配置
- 工业相机:1200万像素,帧率30fps
- 镜头:远心镜头(畸变<0.1%)
- 光源:可编程LED阵列
- 工控机:i7处理器,16GB内存
软件架构
- 前端:Winform界面,显示检测结果及统计报表
- 后端:C#调用VisionPro算法库,数据存储至SQL Server
- 通信:232串口通讯协议 对接PLC