空间矢量脉宽调制(Space Vector Pulse Width Modulation)SVPWM基础
前面已经了解了如何将复杂的三相电流通过Clarke与park变换解耦为d-q旋转坐标系的控制,因此只要令 i d = 0 i_d=0 id=0,控制 i q i_q iq来控制转矩大小。
下面需要了解下相关知识:
1:基础矢量和矢量圆
矢量控制的核心思想就是解耦三相电机复杂的定子电流关系,使得三相电机的控制像直流电机一样简单有效,并且保证矢量变换前后系统所产生的旋转磁动势等效。
Park反变换得到的是两相静止坐标系下的 v α , v β v_\alpha,v_\beta vα,vβ。接下来就是如何利用 v α , v β v_\alpha,v_\beta vα,vβ控制功率管的开启关闭。产生等效磁场。
无刷电机仅靠 6 个功率管的 "开关组合"(即离散的通断动作),无法直接通入 "连续的三相对称正弦电流";但可以通过这些开关组合来 "模拟生成" 逼近正弦的旋转矢量,从而间接实现对电机的精准控制。
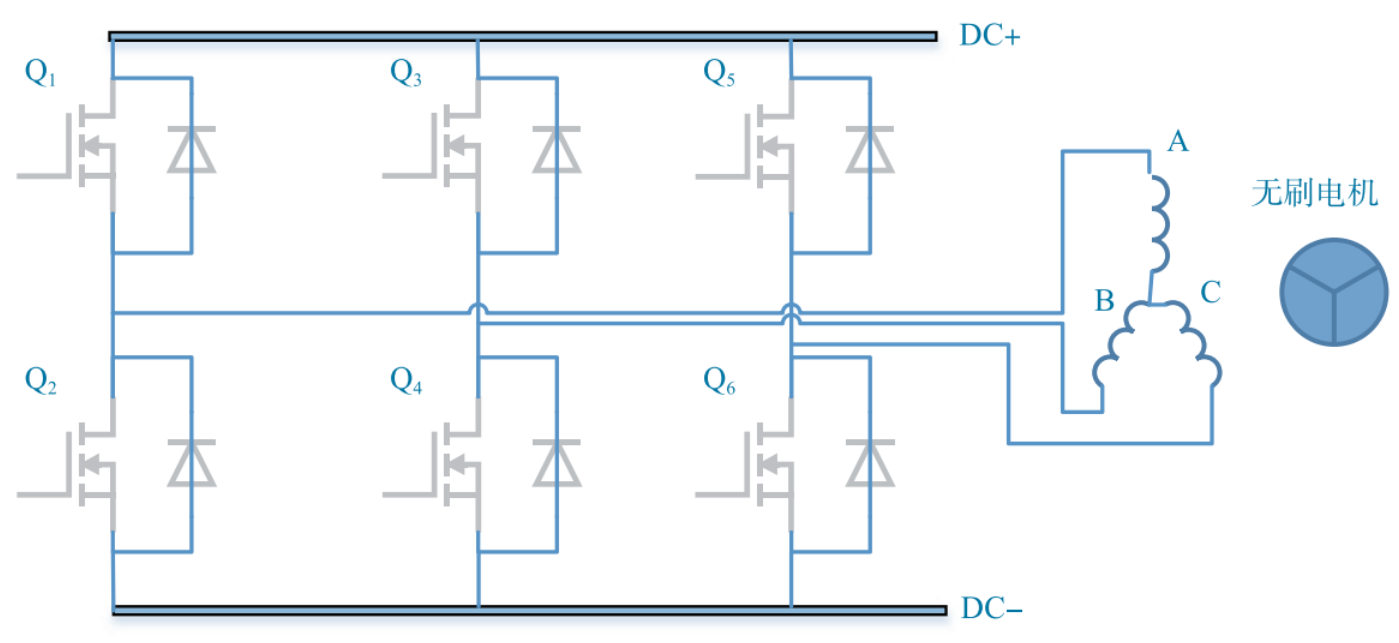
Q 1 到 Q 6 Q_1到Q_6 Q1到Q6为三相逆变器的6个功率管,同一时刻,同一桥臂上下两个功率管不能同时开启。所以一般要在互补PWM波(上管的 PWM 信号为 "高电平导通" 时,下管的 PWM 信号则为 "低电平关断";当上管的 PWM 信号变为低电平时,下管的 PWM 信号则变为高电平。两者的导通 / 关断状态严格互补,且通常会加入死区时间 (即上下管都关断的短暂间隙,防止直通短路)中加入死区(在控制下管开启前,先让上管关断并保持一段 "死区时间";同理,控制上管开启前,也让下管关断并保持死区时间。),防止短路造成危害。
由于上下桥臂必须进行互补操作,因此可以使用上桥臂功率管的状态表示桥臂那一相的状态。
比如 Q 1 Q_1 Q1开通、 Q 2 Q_2 Q2关断,电流就会从 Q 1 Q_1 Q1流入电机的A相。反之则从A相流出。
假设上桥臂开通,下桥臂关断。将该桥臂的状态记作1,反之则为0。因为有3个桥臂,所以可以定义开关函数 S x S_x Sx( x = a , b , c x=a,b,c x=a,b,c)为:
S x = { 1 上桥臂开通,下桥臂关断 0 上桥臂关断,下桥臂开通 S_x = \begin{cases} 1 & \text{上桥臂开通,下桥臂关断} \\ 0 & \text{上桥臂关断,下桥臂开通} \end{cases} Sx={10上桥臂开通,下桥臂关断上桥臂关断,下桥臂开通
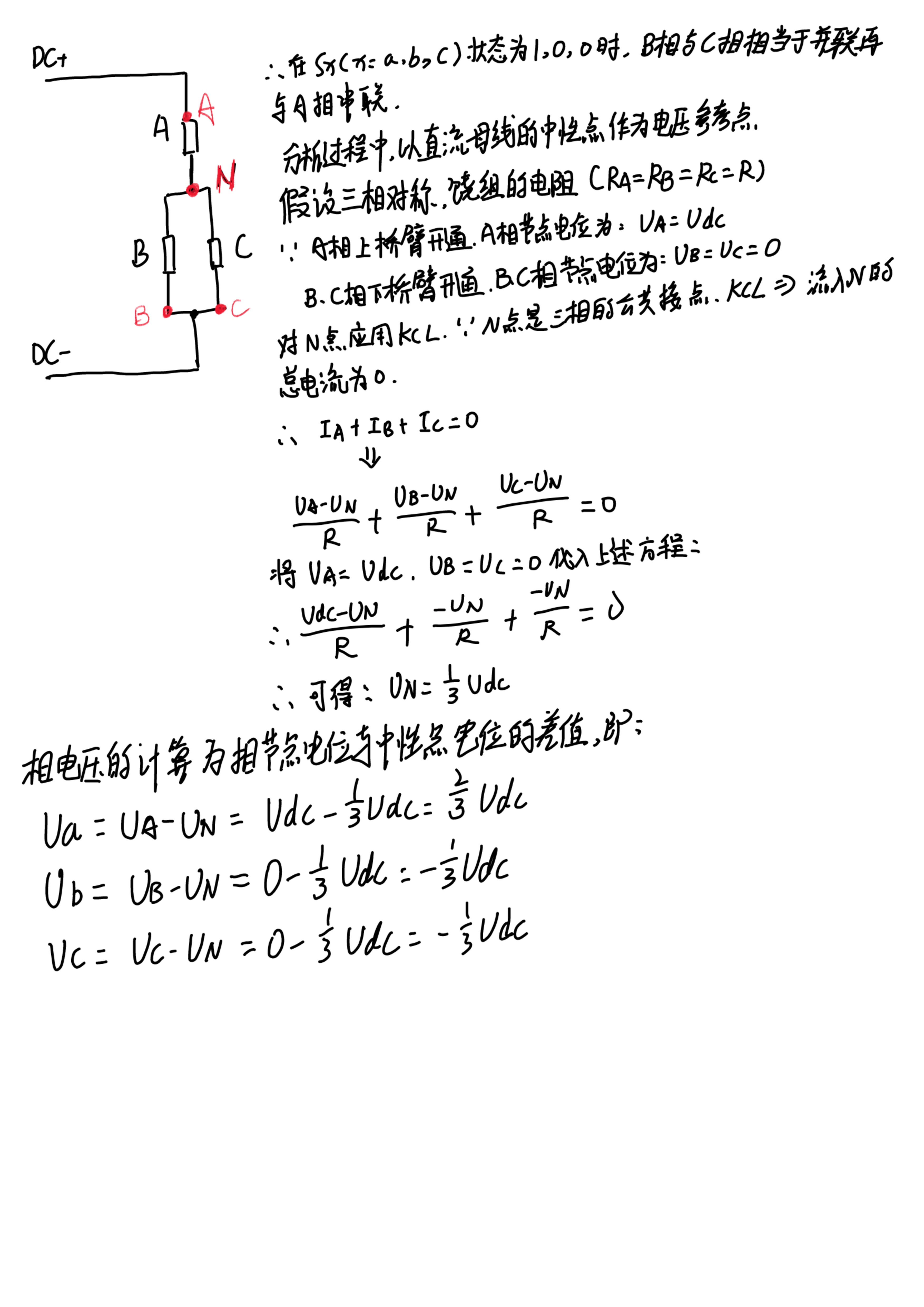
所以三个桥臂一共有8种状态,也就是A、B、C有8种状态组合。假设其中一种状态组合为:A相上桥臂开通,下桥臂关断,A相连接到电源的正极。B相上桥臂关断,下桥臂开通。B相连接到电源的负极。C相上桥臂关断,下桥臂开通,C相直接连接到电源的负极。也就是 S a = 1 , S b = 0 , S c = 0 S_a=1,S_b=0,S_c=0 Sa=1,Sb=0,Sc=0。
等效电路以及电压推导如下: