NoiseEstimator是WebRTC音频处理中的核心噪声估计组件,主要负责实时分析并跟踪音频信号中的噪声频谱特性。它采用混合估计策略,结合分位数统计方法和参数化噪声模型(白噪声+粉红噪声),在启动阶段快速建立噪声基线,在稳定运行阶段基于语音概率自适应更新。通过指数平滑机制,在噪声段加速收敛,在语音段保守更新,有效平衡噪声跟踪速度与语音保护。该组件为后续降噪算法提供准确的噪声谱估计,是保证语音增强效果和语音质量的关键基础模块 。
1. 核心功能
NoiseEstimator 类是 WebRTC 噪声抑制模块的核心组件,主要功能包括:
-
实时估计音频信号的噪声频谱特性
-
结合多种噪声估计方法(分位数估计、参数化模型)
-
根据语音概率自适应更新噪声估计
-
提供多种噪声谱估计结果供后续降噪处理使用
2. 核心算法原理
2.1 参数化噪声建模(白噪声+粉红噪声)
数学公式:
P(f) = A / f^α (粉红噪声模型)其中:
-
P(f):频率 f 处的噪声功率 -
A:粉红噪声幅度参数(pink_noise_numerator_) -
α:粉红噪声指数(pink_noise_exp_)
// 线性回归估计粉红噪声参数
float denom = sum_log_i_square * (kFftSizeBy2Plus1 - kStartBand) - sum_log_i * sum_log_i;
float num = sum_log_i_square * sum_log_magn - sum_log_i * sum_log_i_log_magn;
float pink_noise_adjustment = num / denom; // 估计 α 参数
// 计算参数化噪声谱
float denom = PowApproximation(use_band, parametric_exp);
parametric_noise_spectrum_[i] = parametric_num / denom; // P(f) = A / f^α2.2 分位数噪声估计
quantile_noise_estimator_.Estimate(signal_spectrum, noise_spectrum_);
// 基于信号统计分布的分位数来估计噪声水平2.3 自适应噪声更新
// 基于语音概率的指数平滑更新
noise_spectrum_[i] = gamma * prev_noise_spectrum_[i] +
(1.f - gamma) * (prob_non_speech * signal_spectrum[i] +
prob_speech * prev_noise_spectrum_[i]);3. 关键数据结构
class NoiseEstimator {
private:
const SuppressionParams& suppression_params_; // 噪声抑制参数
float white_noise_level_ = 0.f; // 白噪声水平估计
float pink_noise_numerator_ = 0.f; // 粉红噪声分子 A
float pink_noise_exp_ = 0.f; // 粉红噪声指数 α
// 多种噪声谱估计结果
std::array<float, kFftSizeBy2Plus1> prev_noise_spectrum_; // 前一帧噪声谱
std::array<float, kFftSizeBy2Plus1> conservative_noise_spectrum_; // 保守噪声估计
std::array<float, kFftSizeBy2Plus1> parametric_noise_spectrum_; // 参数化噪声估计
std::array<float, kFftSizeBy2Plus1> noise_spectrum_; // 最终噪声估计
QuantileNoiseEstimator quantile_noise_estimator_; // 分位数噪声估计器
};4. 核心方法详解
4.1 PrepareAnalysis()
void PrepareAnalysis() {
std::copy(noise_spectrum_.begin(), noise_spectrum_.end(),
prev_noise_spectrum_.begin());
}
// 功能:保存当前噪声谱到前一帧,为新一轮分析做准备4.2 PreUpdate()
void PreUpdate(int32_t num_analyzed_frames,
rtc::ArrayView<const float, kFftSizeBy2Plus1> signal_spectrum,
float signal_spectral_sum) {
// 1. 分位数噪声估计
quantile_noise_estimator_.Estimate(signal_spectrum, noise_spectrum_);
// 2. 启动阶段使用参数化噪声模型
if (num_analyzed_frames < kShortStartupPhaseBlocks) {
// 白噪声估计:信号总能量 × 过减因子
white_noise_level_ += signal_spectral_sum * kOneByFftSizeBy2Plus1 *
suppression_params_.over_subtraction_factor;
// 粉红噪声参数估计(线性回归)
// 对数据取对数后拟合直线:log(P) = log(A) - α·log(f)
// 3. 混合分位数估计和参数化估计
noise_spectrum_[i] = (分位数噪声 × 当前帧数 + 参数化噪声 × 剩余帧数) / 总启动帧数
}
}4.3 PostUpdate()
void PostUpdate(rtc::ArrayView<const float> speech_probability,
rtc::ArrayView<const float, kFftSizeBy2Plus1> signal_spectrum) {
constexpr float kNoiseUpdate = 0.9f; // 基础更新系数
for (size_t i = 0; i < kFftSizeBy2Plus1; ++i) {
float prob_speech = speech_probability[i];
float prob_non_speech = 1.f - prob_speech;
// 自适应更新系数:语音概率高时更新更保守
float gamma = prob_speech > 0.2f ? 0.99f : kNoiseUpdate;
// 保守噪声估计:只在确信的非语音段更新
if (prob_speech < 0.2f) {
conservative_noise_spectrum_[i] +=
0.05f * (signal_spectrum[i] - conservative_noise_spectrum_[i]);
}
// 主噪声谱更新:指数平滑
noise_spectrum_[i] = gamma * prev_noise_spectrum_[i] +
(1.f - gamma) * (prob_non_speech * signal_spectrum[i] +
prob_speech * prev_noise_spectrum_[i]);
}
}5. 设计亮点
-
混合估计策略:结合分位数统计方法和参数化物理模型,提高估计准确性
-
自适应更新机制:根据语音概率动态调整更新速率,语音段保守更新,噪声段快速跟踪
-
多版本噪声估计:提供常规、保守、参数化等多种估计结果,适应不同应用场景
-
启动阶段优化:在初始阶段使用参数化模型快速建立噪声基线
-
计算效率优化:使用查表法(log_table)和近似计算降低计算复杂度
6. 典型工作流程
6.1 时序图
┌─────────────┐ ┌─────────────┐ ┌─────────────┐
│ Prepare │ │ PreUpdate │ │ PostUpdate │
│ Analysis │───▶│ │───▶│ │
└─────────────┘ └─────────────┘ └─────────────┘
│ │ │
▼ ▼ ▼
┌─────────────┐ ┌─────────────┐ ┌─────────────┐
│ 保存当前噪声 │ │ 分位数估计 │ │ 自适应更新 │
│ 到前一帧 │ │ 参数化建模 │ │ 保守估计 │
└─────────────┘ └─────────────┘ └─────────────┘6.2 流程图
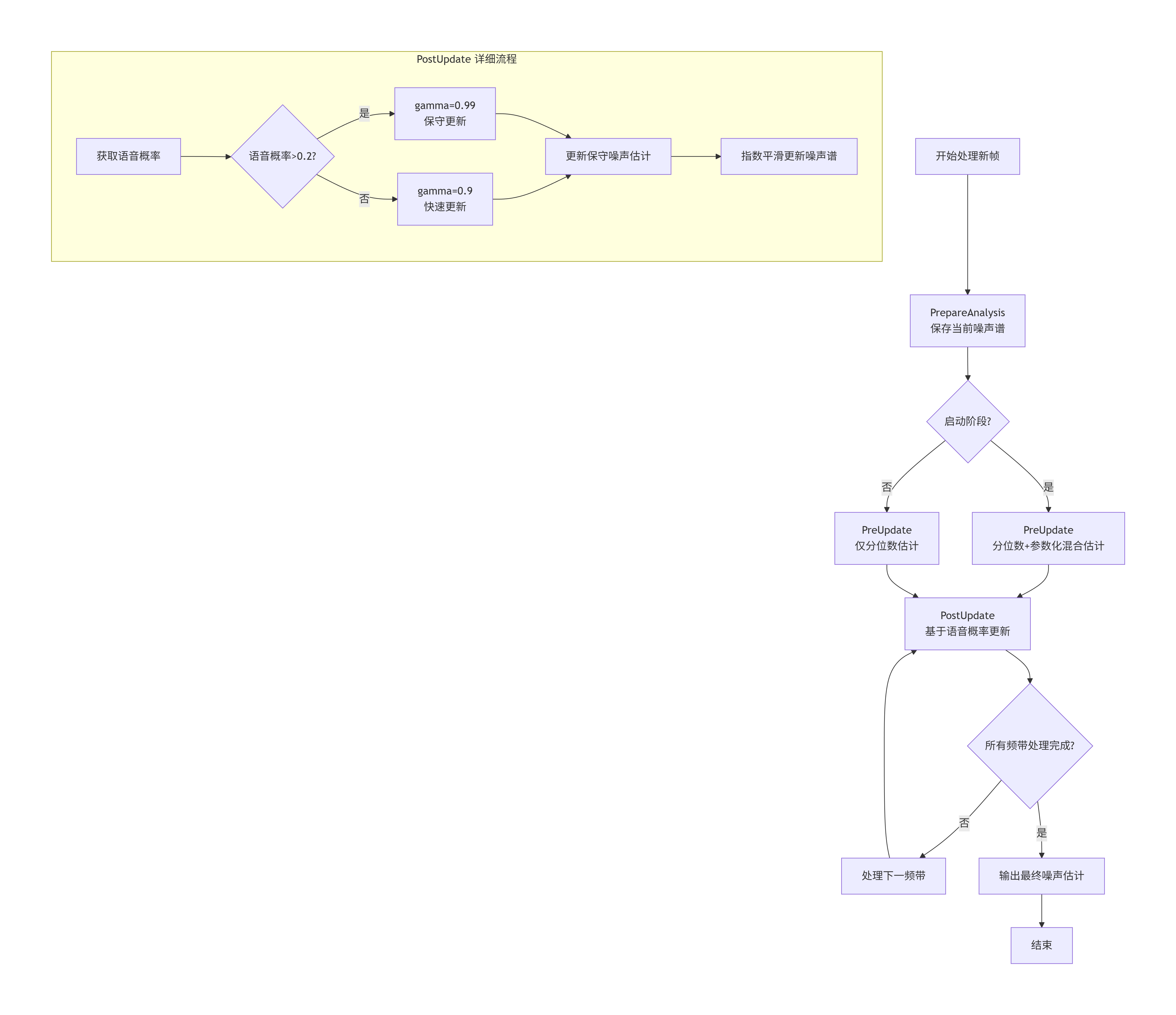
关键流程说明:
-
PrepareAnalysis:帧开始时保存状态,确保时序一致性
-
PreUpdate:核心噪声估计,启动阶段使用混合策略,稳定后使用分位数估计
-
PostUpdate:基于VAD结果的精细调整,在确信的噪声段加速收敛
-
保守估计:专门用于防止语音失真,只在高度确信的噪声段更新
这种设计使得噪声估计既能在平稳噪声环境下快速收敛,又能在语音活动期间保持稳定,避免语音失真。