插补算法分为:1,脉冲增量插补算法;2,数字增量插补算法;
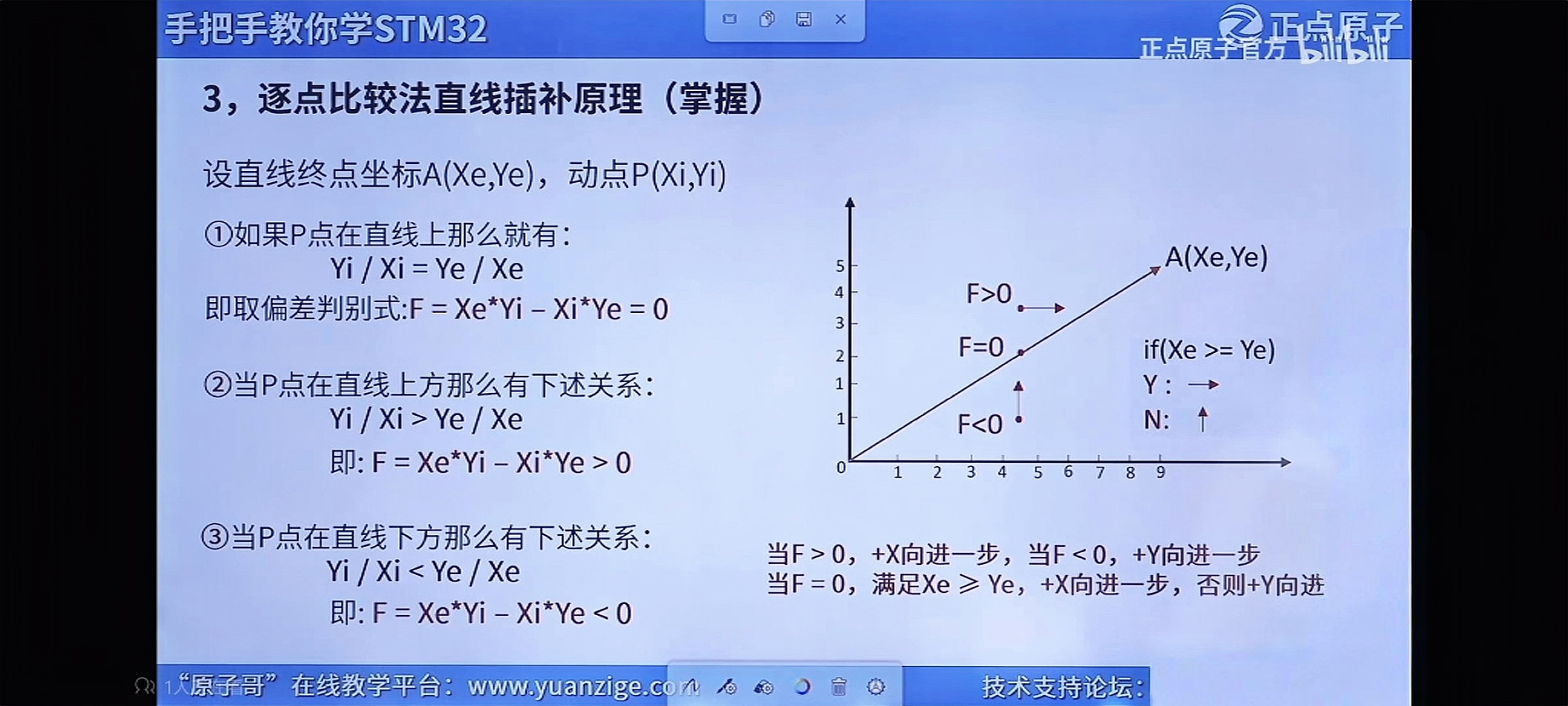
这里采用脉冲增量插补算法的逐点比较法
逐点比较法:每走一步都将加工点的瞬时坐标同规定的图形轨迹比较,判断其偏差,决定下一步的走行。
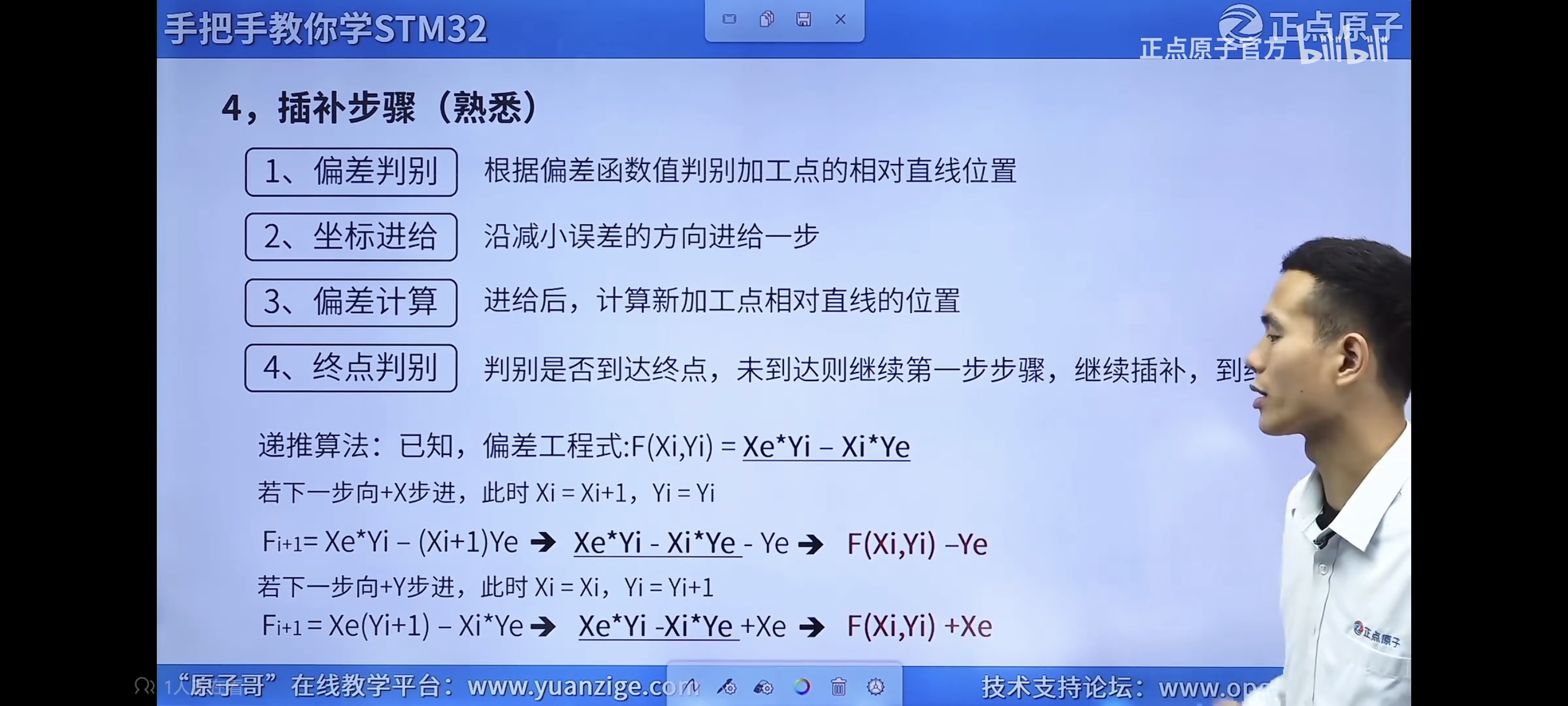
递推算法:
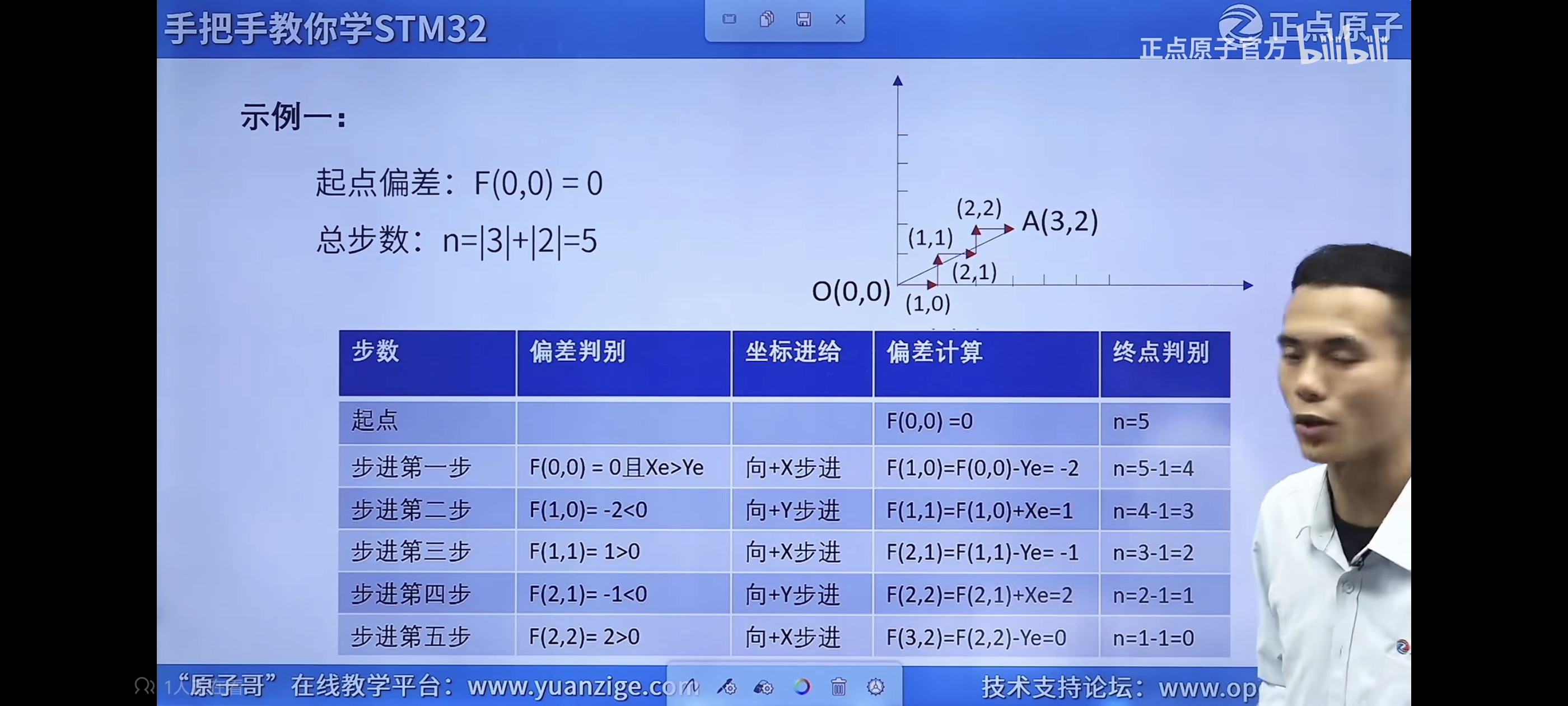
终点判别:将终点位置的x,y坐标相加求和,得出总步数,开始插补时,无论是给哪个轴给进一步,总步数都减一,直到为0时,代表已到达终点,就停止插补;
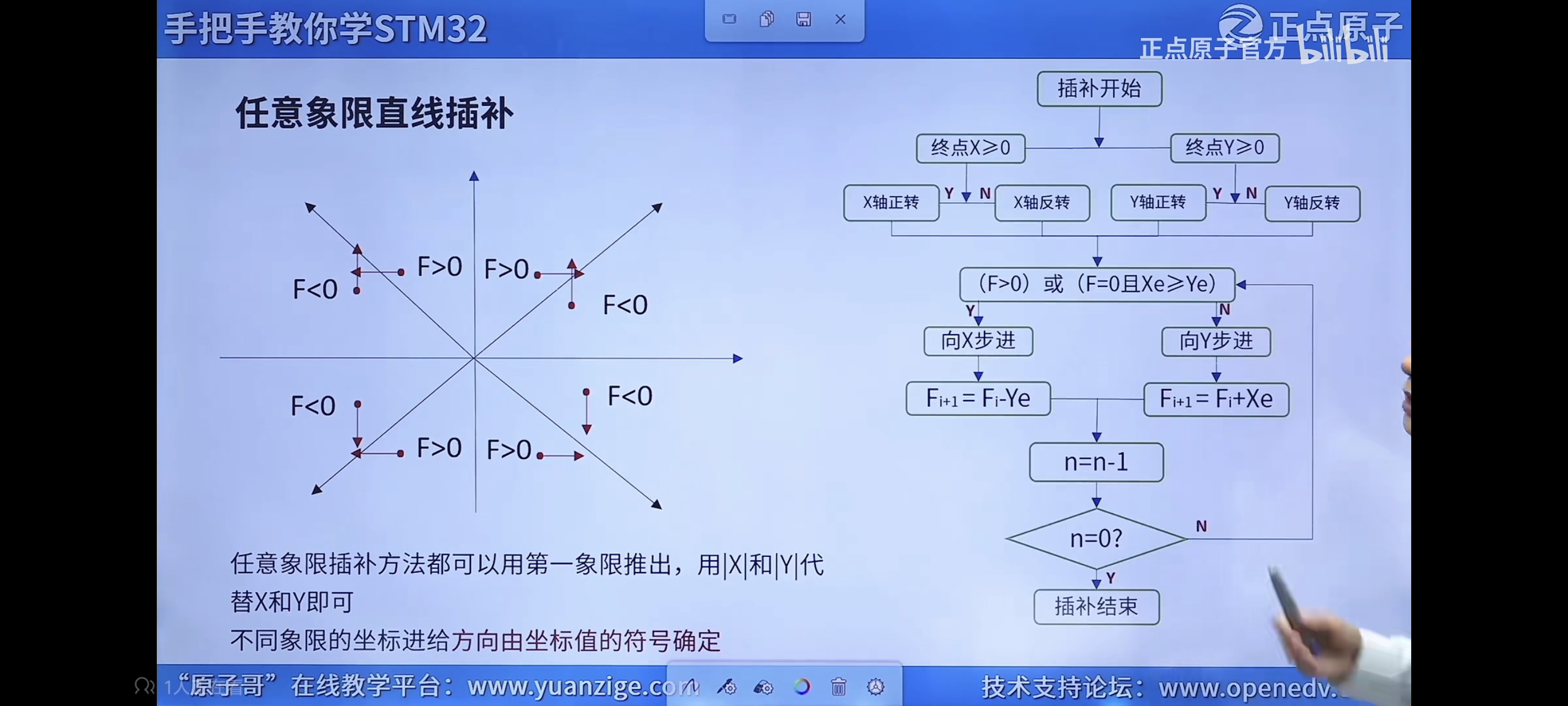
任意象限直线插补
直线插补代码思路
初始化定时器:初始化IO,设置ARR,PSC,计数方式以及脉冲输出模式(PWM2);
电机旋转方向判断:实现任意象限直线插补,需提前判断所属现象,设置电机旋转方向;
编写直线插补算法:实现插补第一步,偏差判别,坐标给进,偏差计算并开启脉冲输出与中断使能;
编写中断服务函数:实现除第一步以外的其他步数的偏差判别,坐标给进,偏差计算,终点判别;
课堂复习:
当到达ARR时,进入一次中断
PWM2向上计数:小于CCR的值输出低电平,大于CCR输出高电平
PWM1向上计数:小于CCR的值输出高电平,大于CCR输出低电平
/* 设置通道的比较值 */
__HAL_TIM_SET_COMPARE(&g_atimx_handle,st_motor[AXIS_X].pulse_channel,Speed); //修改CRR的值
__HAL_TIM_SET_COMPARE(&g_atimx_handle,st_motor[AXIS_Y].pulse_channel,Speed); //修改CRR的值
__HAL_TIM_SET_AUTORELOAD(&g_atimx_handle,Speed*2); /* ARR设置为比较值2倍,这样输出的波形就是50%的占空比 */
TIM_CCxChannelCmd(TIM8, st_motor[axis].pulse_channel, TIM_CCx_DISABLE); /* 使能通道输出 */
TIM_CCxChannelCmd(TIM8, st_motor[g_pol_par.act_axis].pulse_channel, TIM_CCx_ENABLE); /* 使能通道输出 */对PWM进行操作的函数;
PWM波形的占空比用什么函数去改,周期用什么函数改?定时器配置好之后,打开中断的函数是什么?pwm输出怎么到io口上?
1:修改占空比:__HAL_TIM_SET_COMPARE(TIM_HandleTypeDef *htim, uint32_t Channel, uint32_t CompareValue);
2:修改周期:__HAL_TIM_SET_AUTORELOAD(TIM_HandleTypeDef *htim, uint32_t Autoreload);
3:打开中断:1. 使能定时器中断源(HAL 库),2. 配置中断优先级 + 使能中断通道(HAL 库),3. 启动定时器(HAL 库)
__HAL_TIM_ENABLE_IT(TIM_HandleTypeDef *htim, uint32_t IT);
HAL_NVIC_SetPriority(IRQn_Type IRQn, uint32_t PreemptPriority, uint32_t SubPriority); // 设置优先级
HAL_NVIC_EnableIRQ(IRQn_Type IRQn); // 使能中断通道
HAL_TIM_Base_Start_IT(TIM_HandleTypeDef *htim);4:输出到IO口:1:IO 口复用配置(底层初始化);步骤 2:开启 PWM 通道输出(关键函数)
GPIO_InitTypeDef gpio_init_struct;
gpio_init_struct.Pin = ATIM_TIMX_PWM_CH1_GPIO_PIN; // X轴PWM引脚
gpio_init_struct.Mode = GPIO_MODE_AF_PP; // 复用推挽输出(关键)
gpio_init_struct.Pull = GPIO_PULLUP;
gpio_init_struct.Speed = GPIO_SPEED_FREQ_HIGH;
gpio_init_struct.Alternate = ATIM_TIMX_PWM_CHY_GPIO_AF; // 复用为TIM8功能
HAL_GPIO_Init(ATIM_TIMX_PWM_CH1_GPIO_PORT, &gpio_init_struct);
HAL_TIM_PWM_Start(TIM_HandleTypeDef *htim, uint32_t Channel);