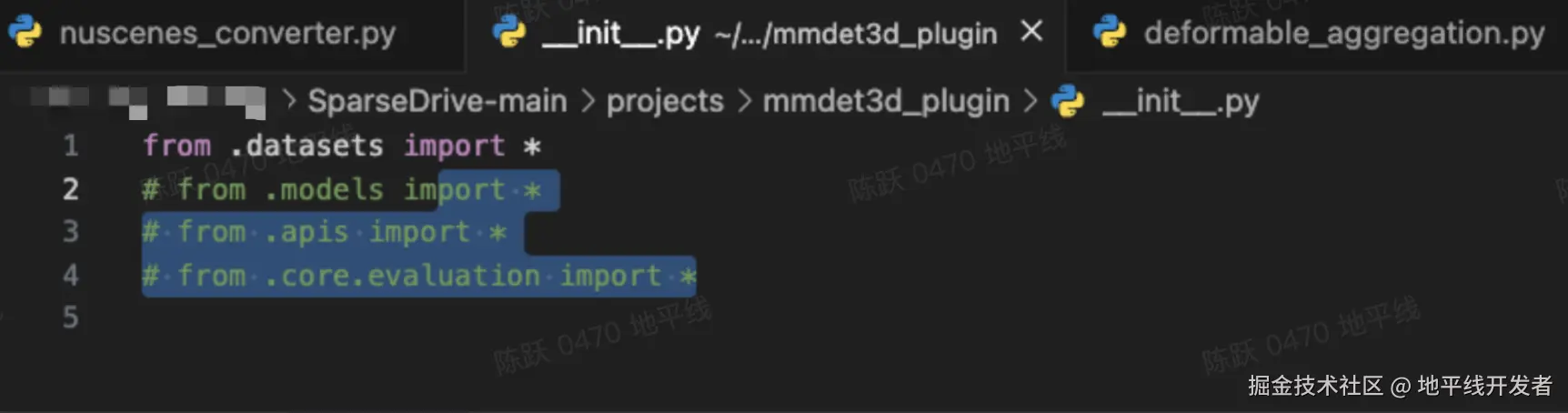
1. 前言
当前端到端智能驾驶技术发展迅速,SparseDrive 作为代表性模型受行业关注。工程化落地时,其模型导出与性能评测环节存在普遍技术挑战,涉及架构与环境兼容性、算子适配等多维度。为推动端到端智驾技术社区化发展,本文梳理 SparseDrive 从 ONNX 导出到硬件部署的技术链路,剖析算子替换、编译报错修复、量化策略优化等案例,构建含环境配置、数据集处理、权重管理、配置工程化的全流程技术指南,为社区提供可复用的端到端模型工程化方案,加速智驾模型从研究到车规级部署转化。
2. 环境部署
解压公版代码包,然后创建 python 虚拟环境:
bash
conda create -n sparsedrive python=3.8 -y
conda activate sparsedrive
pip3 install --upgrade pip
#whl包获取:
curl -O -u 'openexplorer:c5R,2!pG' ftp://vrftp.horizon.ai/misc_j5/torch/torch-1.13.0+cu116-cp38-cp38-linux_x86_64.whl
curl -O -u 'openexplorer:c5R,2!pG' ftp://vrftp.horizon.ai/misc_j5/torch/torchvision-0.14.0+cu116-cp38-cp38-linux_x86_64.whl
pip3 install torch-1.13.0+cu116-cp38-cp38-linux_x86_64.whl
pip3 install torchvision-0.14.0+cu116-cp38-cp38-linux_x86_64.whl
pip3 install torchaudio==0.13.0
cd ~/SparseDrive-main直接 pip3 install -r requirement.txt 会报错,这里打算逐个安装 whl 包。
2.1 升级 gcc(for 安装 mmcv-full)
步骤 1:安装新版 GCC/G++
使用 conda 安装,不会破坏系统自带的 GCC 4.8.5:
安装 GCC 10
ruby
conda install -c https://mirrors.tuna.tsinghua.edu.cn/anaconda/pkgs/main -c https://mirrors.tuna.tsinghua.edu.cn/anaconda/cloud/conda-forge gcc_linux-64=10 gxx_linux-64=10安装完成后,你会在 Conda 环境里有新 GCC,例如:
$ which gcc
/home/users/yue01.chen/anaconda3/envs/sparsedrive/bin/x86_64-conda-linux-gnu-gcc
步骤 2:指定编译器环境变量
为了确保 pip 编译 mmcv-full 时使用 Conda 的新版 GCC,而不是系统 4.8.5,需要设置环境变量:
export CC=(which x86_64-conda-linux-gnu-gcc) export CXX=(which x86_64-conda-linux-gnu-g++)
可以把这两行添加到 。bashrc 或 。zshrc 中,保证每次激活环境自动生效。
步骤 3:卸载旧的 mmcv/mmcv-full
pip uninstall mmcv mmcv-full -y
步骤 4:从源码编译 mmcv-full
使用 --no-binary 强制从源码编译:
pip install mmcv-full==1.7.1 --force-reinstall --no-cache-dir --no-binary mmcv-full
说明:
- --no-binary mmcv-full 表示不使用预编译 wheel,直接编译 C++/CUDA 扩展。
- --force-reinstall + --no-cache-dir 可以避免 pip 缓存的旧版本干扰。
步骤 5:验证安装
Python 中验证 mmcv-full GPU 扩展是否可用:
import mmcv from mmcv.ops import nms_match print("mmcv-full GPU extensions are ready!")
- 如果报错 ModuleNotFoundError: No module named 'mmcv。_ext',说明编译仍有问题,需要检查:
- GCC 版本 ≥ 7
- CUDA 环境变量 CUDA_HOME 是否指向 /home/users/yue01.chen/cuda-11.8
- nvcc 可用 (nvcc --version)
后续在运行中缺乏什么库就直接 pip3 install 即可。
3. 创建数据集与权重下载
3.1 生成 pkl
- 从官网下载 nuscenes 数据集,解压后把 expansion 文件夹放到 maps 下,
- 然后运行:
bash
sh scripts/create_data.sh代码运行完成会在 data/info 目录下生成:
kotlin
├── data
│ ├── infos
│ │ ├── mini
│ │ ├── nuscenes_infos_train.pkl
│ │ └── nuscenes_infos_val.pkl报错的时候把这个注释了:
报错的时候把这个注释了:
3.2 生成 kmeans.py
bash
sh scripts/kmeans.sh3.3 权重下载
github.com/swc-17/Spar... github.com/swc-17/Spar...
download.pytorch.org/models/resn...
下载完成后放在 ckpt 文件夹。
4. config 文件修改
ini
#单卡单batch
total_batch_size = 1
num_gpus = 1
#使用pytorch实现的dfa
use_deformable_func = False # mmdet3d_plugin/ops/setup.py needs to be executed
#导出的onnx不要with_motion_plan,因为跑验证集的时候发现这部分跑不通
task_config = dict(
with_det=True,
with_map=True,
with_motion_plan=False,另外,还有非常重要的一点,config 文件中的 MultiheadFlashAttention 都替换为普通的 MultiheadAttention。
5. 导出脚本和适配修改
导出思路:为了不大幅侵入源码,在导出脚本里重写了 forward,并增加环境变量进行控制
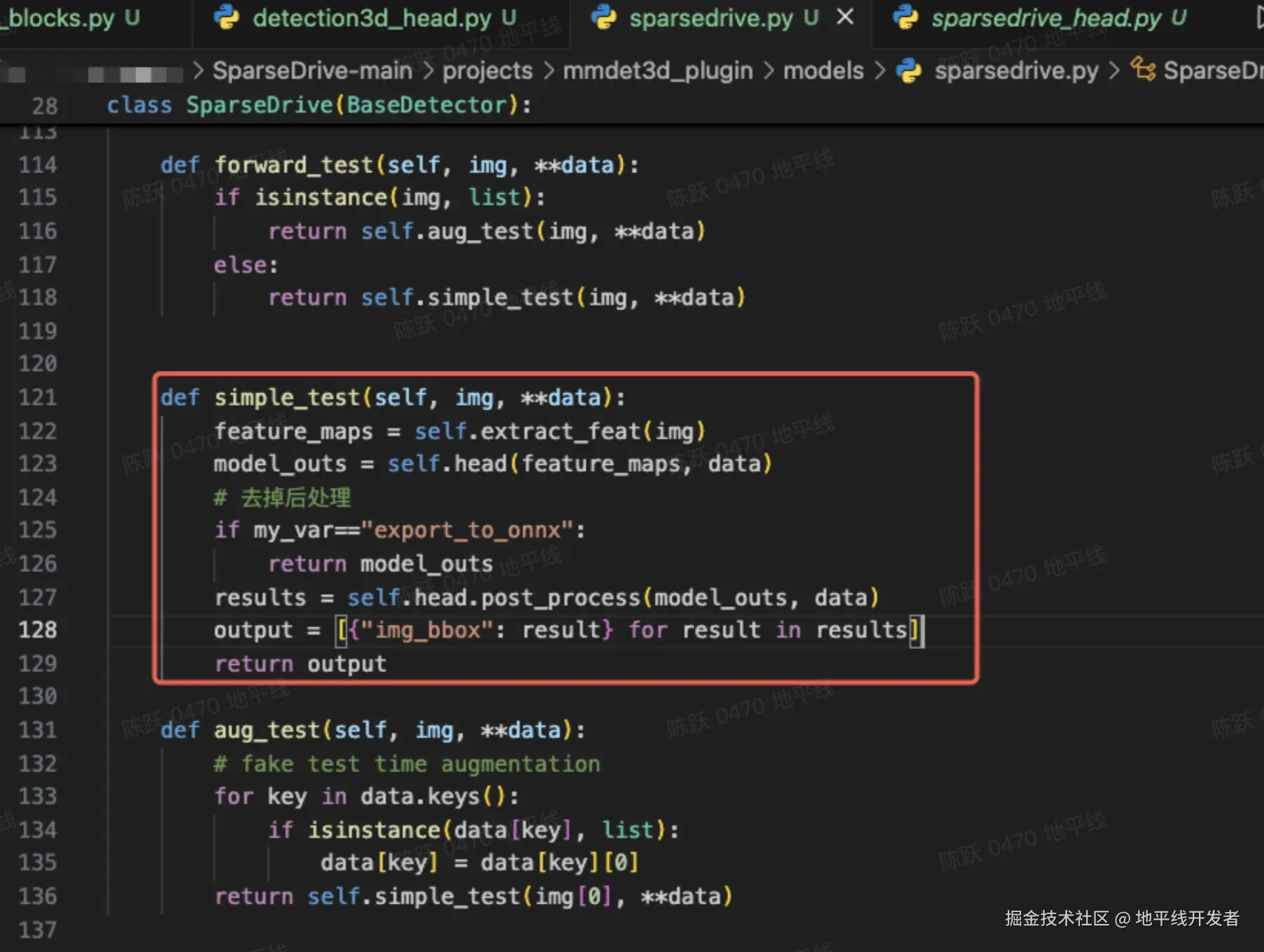
5.1 去除后处理
使用环境变量 my_var=="export_to_onnx"进行控制:
5.2 重写 forward
在 tools 文件夹下构建 forward_export.py,重写 sparsedrive、det_head 和 map_head 的 orward 函数,如下所示:
python
from typing import List, Optional, Tuple, Union
import warnings
import numpy as np
import torch
import torch.nn as nn
#为了适配输入的形式和时序输入,重写了"SparseDrive" 类的forward
def simple_test_onnx_wrapper(self, img, T_global, T_global_inv, timestamp, projection_mat, image_wh, ego_status,cached_anchor,cached_feature,mask,cached_confidence,cached_map_anchor,cached_map_feature,cached_map_confidence):
data = {
"img_metas": [{5.3 self.instance_bank.get_for_export_det_onnx()函数
路径:SR/12yuanrong/SparseDrive-main/projects/mmdet3d_plugin/models/instance_bank.py
ini
def get_for_export_det_onnx(self, batch_size, metas=None, dn_metas=None):
instance_feature = self.instance_feature.unsqueeze(0).repeat(batch_size, 1, 1)
anchor = self.anchor.unsqueeze(0).repeat(batch_size, 1, 1)
#从上一帧的时序输出中获取输入
cached_anchor = metas["cached_anchor"]
cached_feature = metas["cached_feature"]
self.mask = metas["mask"]
self.confidence = metas["cached_confidence"]
time_interval=metas["img_metas"][0]["timestamp"]5.4 self.instance_bank.get_for_export_map_onnx()函数
路径:SparseDrive-main/projects/mmdet3d_plugin/models/instance_bank.py
ini
def get_for_export_map_onnx(self, batch_size, metas=None, dn_metas=None):
instance_feature = self.instance_feature.unsqueeze(0).repeat(batch_size, 1, 1)
anchor = self.anchor.unsqueeze(0).repeat(batch_size, 1, 1)
cached_anchor = metas["cached_map_anchor"]
cached_feature = metas["cached_map_feature"]
self.mask = metas["mask"]
self.confidence = metas["cached_map_confidence"]
time_interval=metas["img_metas"][0]["timestamp"]
return (5.5 修改导出会报错的代码
报错 1
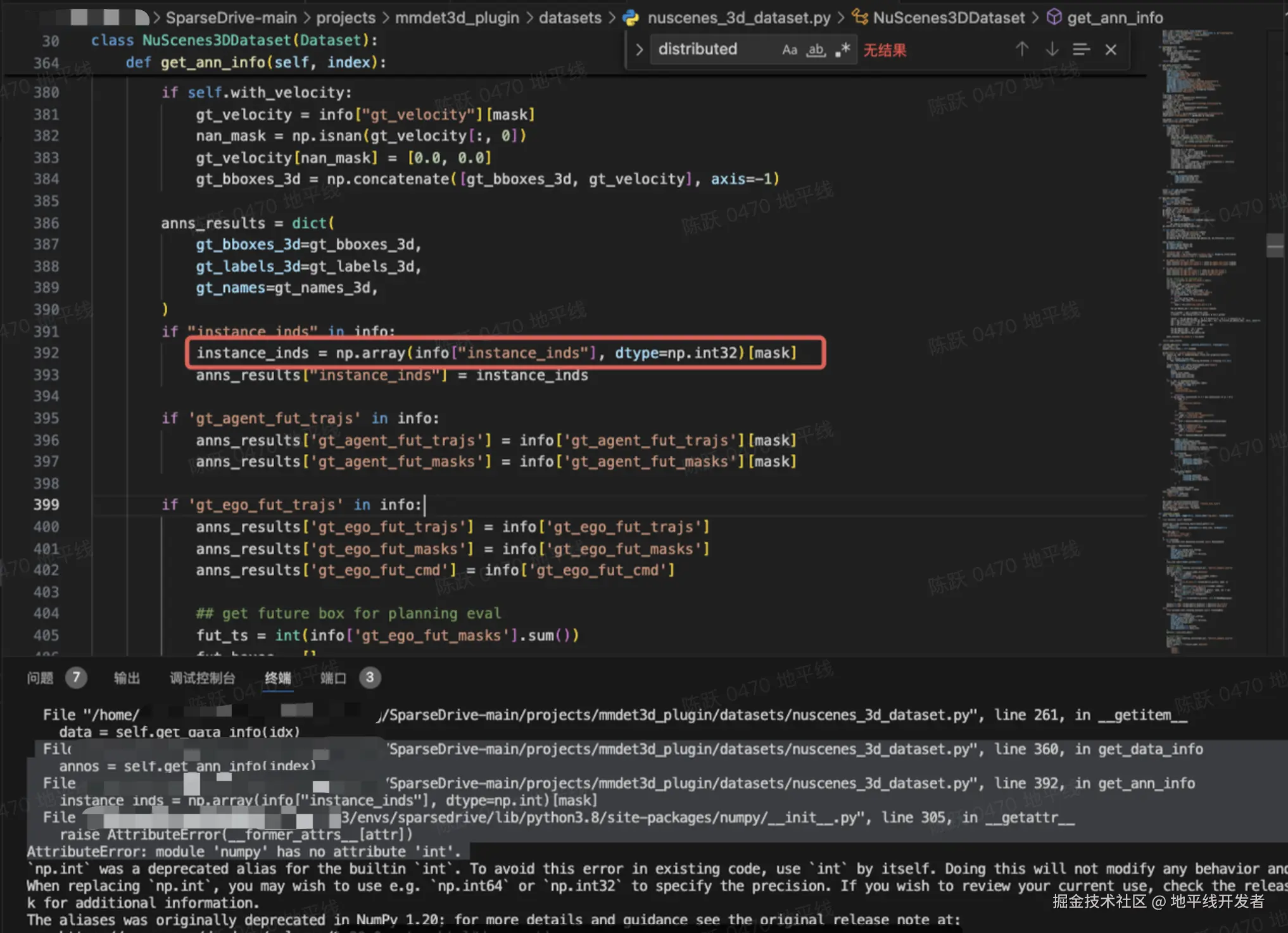
将 instance_inds 修改为 np.int32 类型。
报错 2
报错:
arduino
traceback : Traceback (most recent call last):
File "/home/users/yue01.chen/anaconda3/envs/sparsedrive/lib/python3.8/site-packages/torch/distributed/elastic/multiprocessing/errors/__init__.py", line 346, in wrapper
return f(*args, **kwargs)
File "./tools/export_onnx.py", line 314, in main
torch.onnx.export(
File "/home/users/yue01.chen/anaconda3/envs/sparsedrive/lib/python3.8/site-packages/torch/onnx/utils.py", line 504, in export
_export(
File "/home/users/yue01.chen/anaconda3/envs/sparsedrive/lib/python3.8/site-packages/torch/onnx/utils.py", line 1529, in _export
graph, params_dict, torch_out = _model_to_graph(
File "/home/users/yue01.chen/anaconda3/envs/sparsedrive/lib/python3.8/site-packages/torch/onnx/utils.py", line 1115, in _model_to_graph报错原因:
PyTorch 的 aten::tile 运算符在 ONNX opset 17 中没有对应的实现,所以导出失败。
解决办法
把 torch.tile 替换成等价的 repeat
在 PyTorch 里,torch.tile 其实就是 repeat 的一个封装,功能等价。 而 repeat 在 ONNX 里是受支持的(映射到 Repeat 节点)。
解决办法:
把 self.instance_bank.get_for_export_det_onnx()和 self.instance_bank.get_for_export_map_onnx()函数中的
ini
instance_feature = torch.tile(
self.instance_feature[None], (batch_size, 1, 1)
)
anchor = torch.tile(self.anchor[None], (batch_size, 1, 1))修改成 repeat 实现,如下:
ini
instance_feature = self.instance_feature.unsqueeze(0).repeat(batch_size, 1, 1)
anchor = self.anchor.unsqueeze(0).repeat(batch_size, 1, 1)报错 3(重要)
报错截图:
arduino
File "/home/users/anaconda3/envs/sparsedrive/lib/python3.8/site-packages/torch/onnx/utils.py", line 504, in export _export( File "/home/users/anaconda3/envs/sparsedrive/lib/python3.8/site-packages/torch/onnx/utils.py", line 1529, in _export graph, params_dict, torch_out = _model_to_graph( File "/home/users/naconda3/envs/sparsedrive/lib/python3.8/site-packages/torch/onnx/utils.py", line 1115, in _model_to_graph graph = _optimize_graph( File "/home/users/anaconda3/envs/sparsedrive/lib/python3.8/site-packages/torch/onnx/utils.py", line 663, in _optimize_graph graph = _C._jit_pass_onnx(graph, operator_export_type) File "/home/users/anaconda3/envs/sparsedrive/lib/python3.8/site-packages/torch/onnx/utils.py", line 1867, in _run_symbolic_function return symbolic_fn(graph_context, *inputs, **attrs) File "/home/users/anaconda3/envs/sparsedrive/lib/python3.8/site-packages/torch/onnx/symbolic_opset9.py", line 6664, in onnx_placeholder return torch._C._jit_onnx_convert_pattern_from_subblock(block, node, env) File "/home/users/anaconda3/envs/sparsedrive/lib/python3.8/site-packages/torch/onnx/utils.py", line 1867, in _run_symbolic_function return symbolic_fn(graph_context, *inputs, **attrs) File "/home/users/anaconda3/envs/sparsedrive/lib/python3.8/site-packages/torch/onnx/symbolic_opset11.py", line 230, in index_put if symbolic_helper._is_bool(indices_list[idx_]): File "/home/users/anaconda3/envs/sparsedrive/lib/python3.8/site-packages/torch/onnx/symbolic_helper.py", line 736, in _is_bool return _is_in_type_group(value, {_type_utils.JitScalarType.BOOL}) File "/home/users/anaconda3/envs/sparsedrive/lib/python3.8/site-packages/torch/onnx/symbolic_helper.py", line 708, in _is_in_type_group scalar_type = value.type().scalarType() RuntimeError: r INTERNAL ASSERT FAILED at "../aten/src/ATen/core/jit_type_base.h":547, please report a bug to PyTorch.报错原因:
ONNX 导出失败的根因是图里某处会把一个标量常量以没有 dtype(即 None) 的形式传给了 ONNX 导出器,导致 torch.onnx。_type_utils.JitScalarType.from_name 收到 None 并抛出 ValueError: Scalar type name cannot be None。这类情况常在用高级索引/原地赋值(tensorindex = other、index_put、masked_scatter 等)时出现,导出器有时会把标量常量漏掉 dtype。
优先级修复建议(按顺序尝试)
- 定位问题代码:查找模型中类似 x:, idx = y、xindex = y、index_put、masked_scatter、masked_fill 的用法。也可在 torch.onnx.export(..., verbose=True) 打印的导出图里查找 aten::index_put、index_put、prim::ListConstruct 等节点位置。
- 把原地/索引赋值改写为 ONNX 友好的算子 :常用替代方法:
- 用 scatter:
- x = x.clone() x = x.scatter(dim, indices.unsqueeze(-1).expand(...), y)
- 用布尔 mask + torch.where:
- mask = torch.zeros_like(x, dtype=torch.bool) mask:, indices = True x = torch.where(mask, y_broadcasted, x)
- 这两种通常能被 ONNX 导出器更好地支持。
- 确保传入 torch.onnx.export 的示例输入都有明确 dtype(不要传 None 或 Python 原始标量),例如 tensor.float(). cuda()、indices.long().cuda()。
- 尝试不同的 opset 或更新 PyTorch:有些导出器 bug 在较新 opset 或 PyTorch 版本里被修复。可试 opset_version=12、14 等;若可行,升级 PyTorch 往往能解决这类问题。
- 临时回退方案:如果短时间无法改模型,可使用 ATen fallback(operator_export_type=OperatorExportTypes.ONNX_ATEN_FALLBACK)导出,得到包含 ATen 节点的 ONNX(不适合生产但便于调试)。
- 不要修改 site-packages(除非非常了解风险):虽然可以在 _type_utils.from_name 做防守性修改防止报错,但这不是长期或推荐的做法。
通过二分法定位到是 refine 模块的报错(即在 refine 模块前 return 导出 onnx 不报错,经过 refine 层以后 return 会报错),然后逐渐定位到其中的这个部分触发了上述 1 中的错误,如下:
ini
output[..., self.refine_state] = (
# output[..., self.refine_state] + anchor[..., self.refine_state]
# )
# if self.normalize_yaw:
# output[..., [SIN_YAW, COS_YAW]] = torch.nn.functional.normalize(
# output[..., [SIN_YAW, COS_YAW]], dim=-1
# )
# if self.output_dim > 8:
# if not isinstance(time_interval, torch.Tensor):
# time_interval = instance_feature.new_tensor(time_interval)修改后的代码:
ini
@PLUGIN_LAYERS.register_module()
class SparseBox3DRefinementModule(BaseModule):
def __init__(
self,
embed_dims=256,
output_dim=11,
num_cls=10,
normalize_yaw=False,
refine_yaw=False,
with_cls_branch=True,5.6 scatternd 消除
由于征程 6 工具链目前只支持 CPU 实现的 scatternd,所以在导出 onnx 的时候把这部分替换成 slice+concat 的实现。
路径:SparseDrive-main/projects/mmdet3d_plugin/models/detection3d/detection3d_blocks.py
ini
def forward(
self,
anchor,
instance_feature=None,
T_cur2temp_list=None,
cur_timestamp=None,
temp_timestamps=None,
):
bs, num_anchor = anchor.shape[:2]
size = anchor[..., None, [W, L, H]].exp()5.7 导出代码
导出脚本 export_onnx.py 基于 SparseDrive-main/tools/test.py 进行编写,其具体实现如下:
python
# Copyright (c) OpenMMLab. All rights reserved.
import argparse
import mmcv
import os
from os import path as osp
import torch
import warnings
from mmcv import Config, DictAction
from mmcv.cnn import fuse_conv_bn另外,需要对 tools/dist_test.sh 进行修改如下;
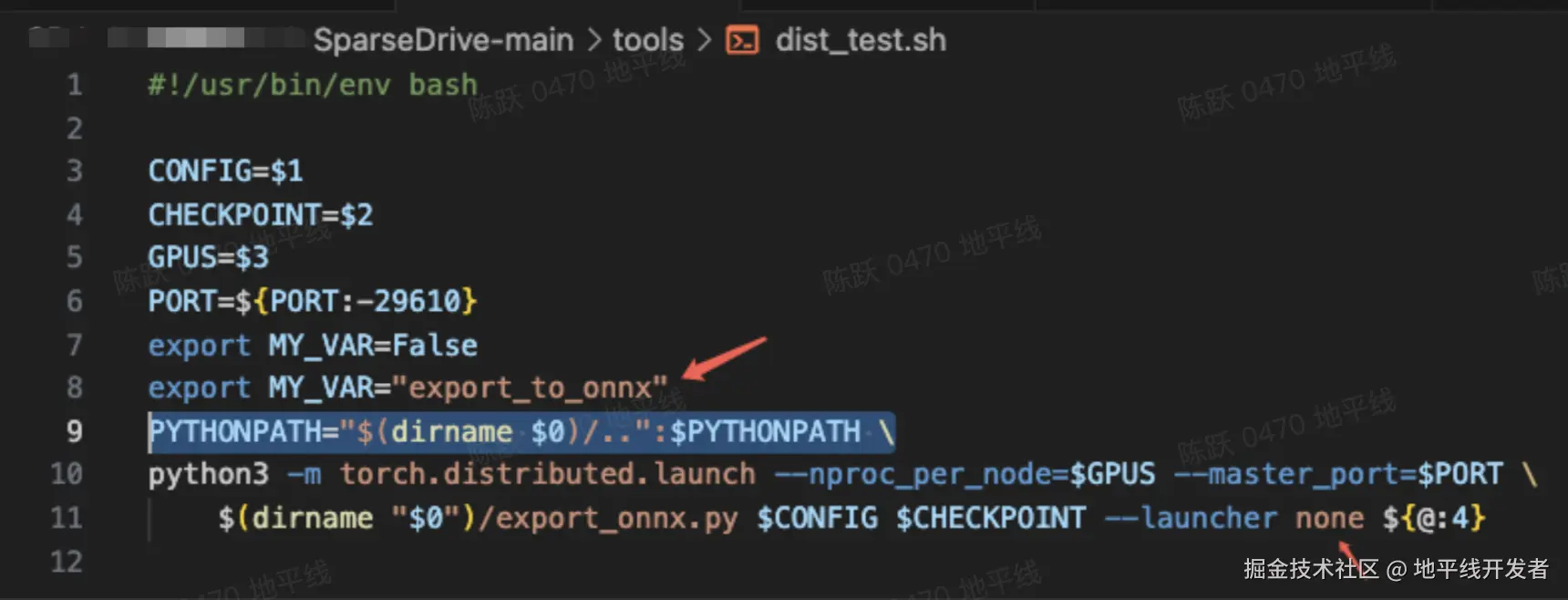
导出脚本运行:
bash
bash scripts/test.sh5.9 cache 过程的 scatternd 和 Cast 算子消除(如果模型中存在 cache 过程的话)
如果想要在模型中增加输出 cache 的功能,即在 forward_export.py 的函数中增加以下代码:
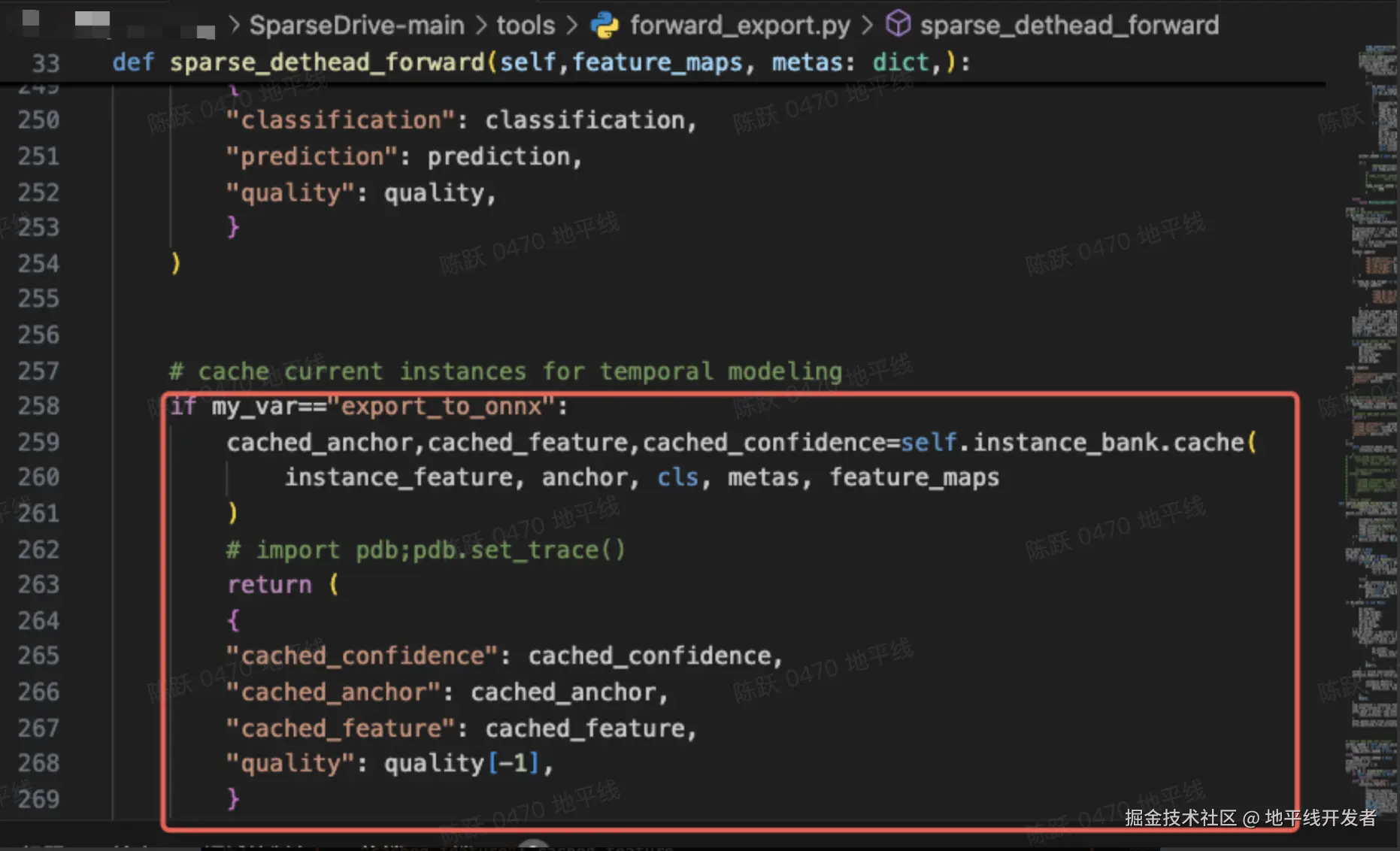
但是公版的 self.instance_bank.cache()函数的写法会引入工具链只能在 CPU 上支持的 ScatterND 算子和 Cast 算子,所以这里需要对代码做两处适配。
5.9.1 消除 scatternd 算子:
路径:SparseDrive-main/projects/mmdet3d_plugin/models/instance_bank.py 中的 cache 函数:
ini
if self.confidence is not None:
# confidence[:, : self.num_temp_instances] = torch.maximum(
# self.confidence[0] * self.confidence_decay,
# confidence[:, : self.num_temp_instances],
# )
left = torch.maximum(
self.confidence[0] * self.confidence_decay,
confidence[:, :self.num_temp_instances],)
right = confidence[:, self.num_temp_instances:]
confidence = torch.cat([left, right], dim=1)5.9.2 消除 cast 算子:
路径:SparseDrive-main/projects/mmdet3d_plugin/models/instance_bank.py 中的 topk 函数:
ini
def topk(confidence, k, *inputs):
# bs, N = confidence.shape[:2]
# confidence, indices = torch.topk(confidence, k, dim=1)
# indices = (
# indices + torch.arange(bs, device=indices.device)[:, None] * N
# ).reshape(-1)
# outputs = []
# for input in inputs:
# outputs.append(input.flatten(end_dim=1)[indices].reshape(bs, k, -1))
bs, N = confidence.shape[:2]6. 性能评测
6.1 算子支持情况
- nash-p 下可以编译成功
- 修改模型后,所有算子支持 BPU 实现
yaml
b30.binary_eltwise : 2071
b30.conv2d : 503
b30.gather2d : 10
b30.lut : 314
b30.pool2d : 1
b30.reduce : 528
b30.resize2d : 3
b30.warp : 48
b30vpu.dequantize : 9
b30vpu.quantize : 86.2 静态 per 性能分析
6.2.1 确定性能瓶颈
获取到 perf.html 和 perf.json 后,使用【新版 perf 文件解读与性能分析】附录中的脚本对性能进行分析,输入为 perf.json,输出如下所示:
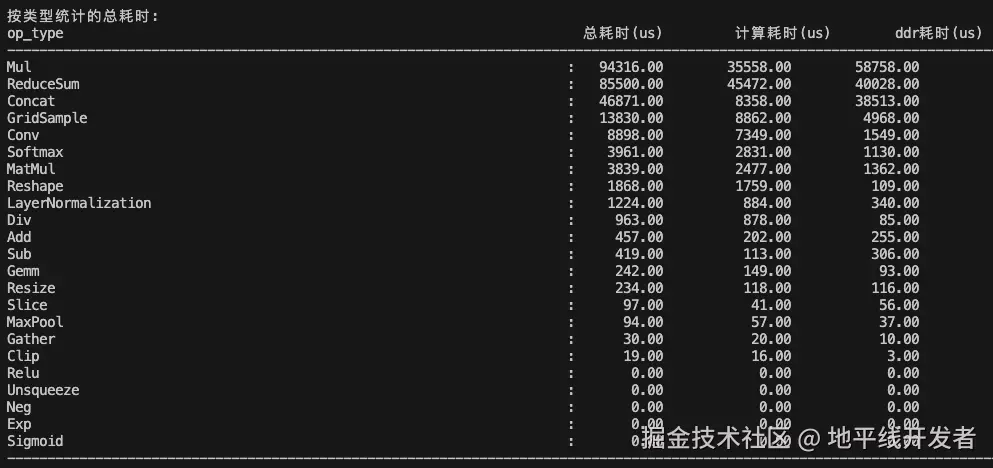
按照算子类型统计的耗时:
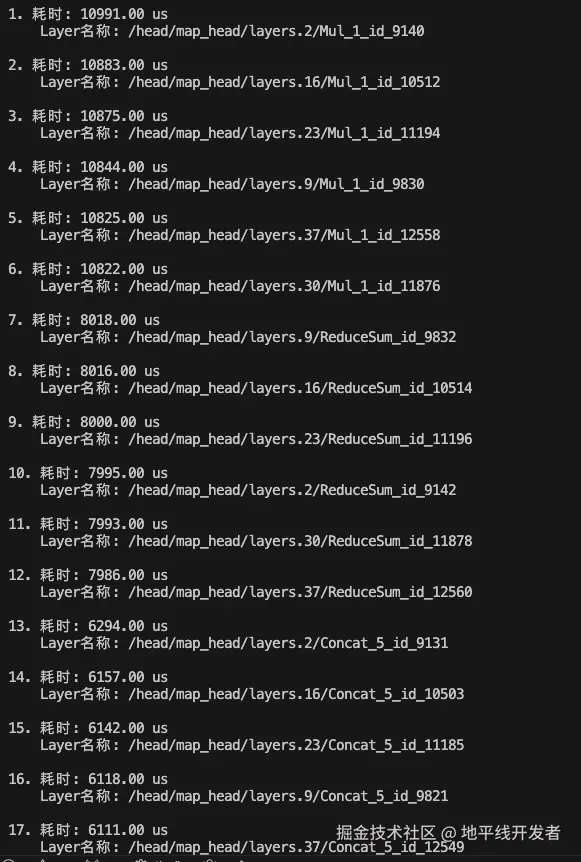
耗时排名 TOP20 的算子:
根据以上信息,可以得出优化目标:
- Mul 和 ReduceSum 算子的耗时最久,而且 mul 算子 ddr 耗时超过计算耗时的 65%,引发了带宽问题;
- ToP12 耗时的算子就是 Mul 和 ReduceSum,所以重点是优化 Mul 和 ReduceSum 算子。
6.2.2 性能优化策略
查看模型结构发现,模型中耗时的 Mul 和 ReduceSum 都处于这样的子结构中,所以我们主要是对这个结构进行性能优化。
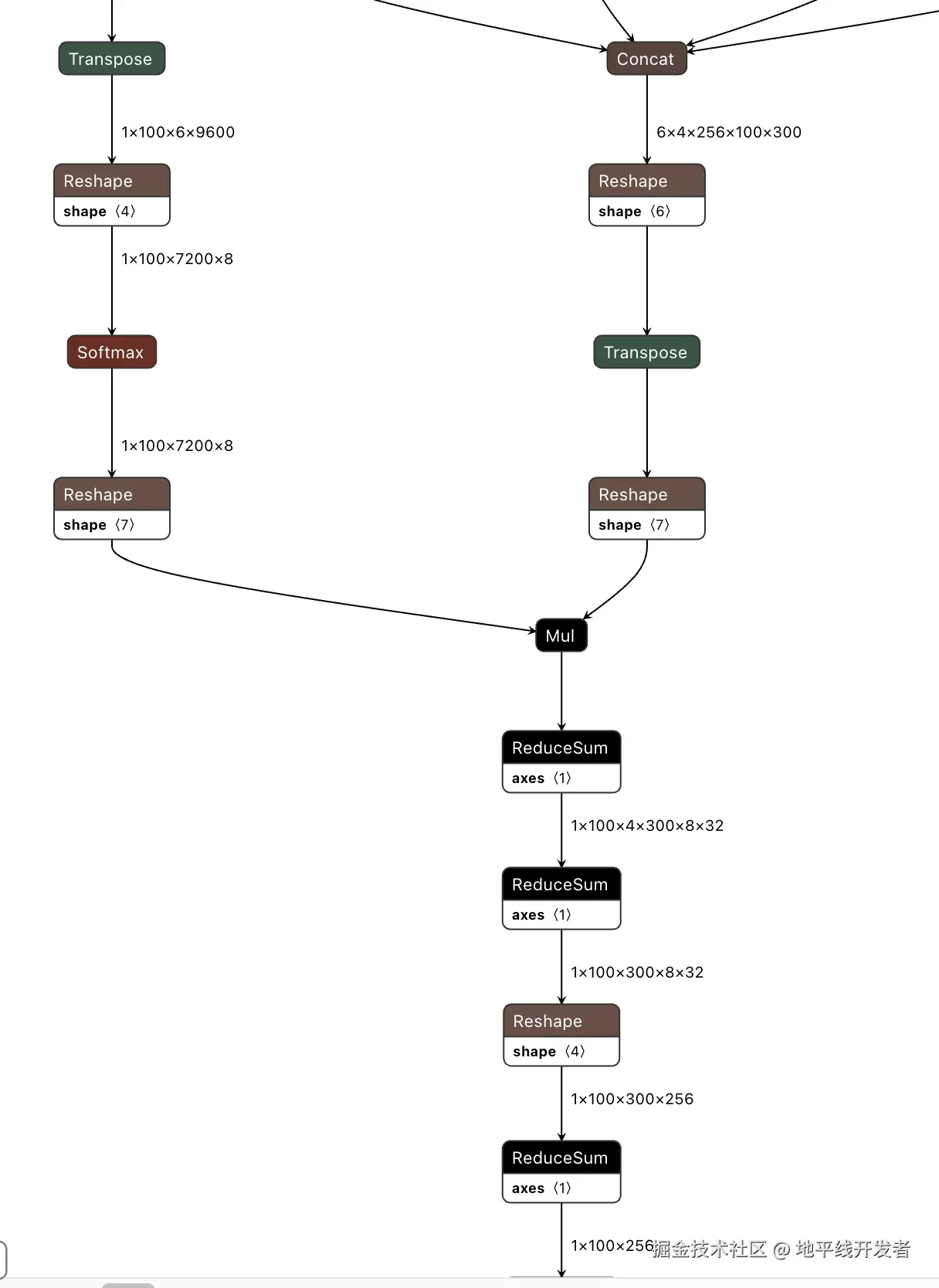
此结构主要由 Mul、ReduceSum 和数据搬运算子组成,一方面 MulReduceSum 是运行在专门做向量计算的 VAE,加速效果不如张量,另一方面输入的 shape 非常大,也就解释了为何会引发带宽问题。、
所以这里考虑将 Mul+ReduceSum 计算替换为等价的 Mamtmul,从而使得这部分计算在 VAE 上加速。
性能优化效果验证
这里主要有以下步骤:
- **替换为 Matmul 计算:**根据上述子图结构将其替换为 Matmul 计算,并导出 optimized.onnx;
- **替换等价性验证:**在原始 onnx 中提取上述子图,和 optimized.onnx 进行输出一致性验证;
- **性能评测:**同时对原始 onnx 子图和 optimized.onnx 进行 fast-perf,验证性能收益。
上述步骤可以参考:developer.horizon.auto/blog/13065