import math
import numpy as np
from pyautocad import Autocad, APoint
import pyperclip
def get_selection_or_model_space(acad, doc):
"""获取用户选择的对象"""
print("请选择对象")
try:
import time
unique_name = f"Temp_Selection_Set_{int(time.time() * 1000) % 10000}"
selection_set = doc.SelectionSets.Add(unique_name)
selection_set.SelectOnScreen()
if selection_set.Count > 0:
print(f"检测到 {selection_set.Count} 个选中对象")
selection = []
for i in range(selection_set.Count):
try:
entity = selection_set.Item(i)
selection.append(entity)
except Exception as e:
print(f"无法访问选中对象 {i}: {e}")
selection_set.Delete()
return selection
else:
selection_set.Delete()
return []
except Exception as e:
print(f"无法获取选择集: {e}")
return None
def get_points_from_entities(entities):
"""从AutoCAD实体中提取线段的端点"""
points = []
for i, entity in enumerate(entities):
try:
if entity.ObjectName == "AcDbLine":
start = entity.StartPoint[:2]
end = entity.EndPoint[:2]
points.append(tuple(start))
points.append(tuple(end))
print(f"找到线段 {len(points)//2}: 起点({start[0]:.2f}, {start[1]:.2f}), 终点({end[0]:.2f}, {end[1]:.2f})")
elif entity.ObjectName == "AcDbPolyline":
vertex_count = entity.Coordinates.count
coords = entity.Coordinates
polyline_points = []
for j in range(0, vertex_count, 2):
if j + 1 < vertex_count:
x, y = coords[j], coords[j+1]
polyline_points.append((x, y))
if entity.Closed and len(polyline_points) > 1:
polyline_points.pop()
points.extend(polyline_points)
print(f"找到多段线 {i+1}: 共{len(polyline_points)}个顶点")
elif entity.ObjectName == "AcDbArc":
center = entity.Center[:2]
radius = entity.Radius
start_angle = entity.StartAngle
end_angle = entity.EndAngle
if end_angle < start_angle:
end_angle += 2 * math.pi
for k in range(20):
angle = start_angle + (end_angle - start_angle) * k / 19
x = center[0] + radius * math.cos(angle)
y = center[1] + radius * math.sin(angle)
points.append((x, y))
print(f"找到圆弧 {i+1}: 采样20个点")
elif entity.ObjectName == "AcDbCircle":
center = entity.Center[:2]
radius = entity.Radius
for k in range(40):
angle = 2 * math.pi * k / 40
x = center[0] + radius * math.cos(angle)
y = center[1] + radius * math.sin(angle)
points.append((x, y))
print(f"找到圆 {i+1}: 采样40个点")
elif entity.ObjectName == "AcDbPolyline" or entity.ObjectName == "AcDb2dPolyline":
try:
# 获取坐标数据
coords = entity.Coordinates
# 处理不同的坐标数据类型
if hasattr(coords, 'count'):
# 如果 count 是方法,则调用它
if callable(coords.count):
vertex_count = coords.count()
else:
vertex_count = coords.count
else:
# 如果没有 count 属性,则使用 len()
vertex_count = len(coords)
polyline_points = []
for j in range(0, vertex_count, 2):
if j + 1 < vertex_count:
x, y = coords[j], coords[j+1]
polyline_points.append((x, y))
# 检查是否闭合
is_closed = False
try:
is_closed = entity.Closed
except:
# 如果无法直接获取 Closed 属性,尝试其他方式
try:
is_closed = entity.GetClosed() if hasattr(entity, 'GetClosed') else False
except:
is_closed = False
if is_closed and len(polyline_points) > 1:
# 对于闭合多段线,检查首尾点是否相同
if polyline_points and polyline_points[0] == polyline_points[-1]:
polyline_points.pop()
points.extend(polyline_points)
obj_type = "二维多段线" if entity.ObjectName == "AcDb2dPolyline" else "多段线"
print(f"找到{obj_type} {i+1}: 共{len(polyline_points)}个顶点")
except Exception as e:
print(f"处理多段线 {i+1} 时出错: {e}")
except Exception as e:
print(f"处理多段线 {i+1} 时出错: {e}")
else:
print(f"跳过非线段对象 {i+1}: {entity.ObjectName}")
except Exception as e:
print(f"处理对象 {i+1} 时出错: {e}")
continue
points = list(set(points))
print(f"共提取到 {len(points)} 个不重复的点")
return points
def get_aabb_bounding_box(points):
"""获取轴对齐的最小包围矩形"""
if len(points) < 1:
return None
x_coords = [p[0] for p in points]
y_coords = [p[1] for p in points]
min_x, max_x = min(x_coords), max(x_coords)
min_y, max_y = min(y_coords), max(y_coords)
width = max_x - min_x
height = max_y - min_y
corners = [
(min_x, min_y),
(max_x, min_y),
(max_x, max_y),
(min_x, max_y)
]
return {
'type': 'AABB',
'corners': corners,
'width': width,
'height': height,
'area': width * height,
'angle': 0,
'center': ((min_x + max_x) / 2, (min_y + max_y) / 2)
}
def rotate_point(point, angle, center=(0, 0)):
"""绕指定中心点旋转点"""
x, y = point
cx, cy = center
x -= cx
y -= cy
rad = math.radians(angle)
cos_rad, sin_rad = math.cos(rad), math.sin(rad)
new_x = x * cos_rad - y * sin_rad
new_y = x * sin_rad + y * cos_rad
new_x += cx
new_y += cy
return (new_x, new_y)
def get_bounding_box_area(points, angle):
"""计算给定角度下的包围盒面积和边界信息"""
rotated_points = [rotate_point(p, -angle) for p in points]
x_coords = [p[0] for p in rotated_points]
y_coords = [p[1] for p in rotated_points]
min_x, max_x = min(x_coords), max(x_coords)
min_y, max_y = min(y_coords), max(y_coords)
width = max_x - min_x
height = max_y - min_y
area = width * height
return area, (min_x, max_x, min_y, max_y)
def ternary_search_min_area(points, left, right, eps=1e-6):
"""使用三分法搜索最小面积角度"""
while right - left > eps:
mid1 = left + (right - left) / 3
mid2 = right - (right - left) / 3
area1, _ = get_bounding_box_area(points, mid1)
area2, _ = get_bounding_box_area(points, mid2)
if area1 < area2:
right = mid2
else:
left = mid1
optimal_angle = (left + right) / 2
min_area, bounds = get_bounding_box_area(points, optimal_angle)
return optimal_angle, min_area, bounds
def get_oriented_bounding_box_approx(points):
"""使用三分搜索获取最小面积包围矩形"""
if len(points) < 2:
return None
angles_to_check = []
for i in range(0, 180, 2):
angles_to_check.append(i)
max_dist = 0
farthest_pair = None
for i in range(len(points)):
for j in range(i+1, len(points)):
dist = math.sqrt((points[i][0]-points[j][0])**2 + (points[i][1]-points[j][1])**2)
if dist > max_dist:
max_dist = dist
farthest_pair = (points[i], points[j])
if farthest_pair:
p1, p2 = farthest_pair
angle = math.degrees(math.atan2(p2[1] - p1[1], p2[0] - p1[0]))
angles_to_check.extend([angle, angle + 90])
angles_to_check = list(set([a % 180 for a in angles_to_check]))
min_area = float('inf')
best_angle = 0
best_bounds = None
for angle in angles_to_check:
area, bounds = get_bounding_box_area(points, angle)
if area < min_area:
min_area = area
best_angle = angle
best_bounds = bounds
search_range = 5
left_angle = (best_angle - search_range) % 180
right_angle = (best_angle + search_range) % 180
if left_angle > right_angle:
optimal_angle1, min_area1, bounds1 = ternary_search_min_area(points, 0, right_angle)
optimal_angle2, min_area2, bounds2 = ternary_search_min_area(points, left_angle, 180)
if min_area1 < min_area2:
optimal_angle = optimal_angle1
min_area = min_area1
best_bounds = bounds1
else:
optimal_angle = optimal_angle2
min_area = min_area2
best_bounds = bounds2
else:
optimal_angle, min_area, best_bounds = ternary_search_min_area(points, left_angle, right_angle)
min_x, max_x, min_y, max_y = best_bounds
width = max_x - min_x
height = max_y - min_y
rotated_corners = [
(min_x, min_y),
(max_x, min_y),
(max_x, max_y),
(min_x, max_y)
]
corners = [rotate_point(p, optimal_angle) for p in rotated_corners]
center_x = (min_x + max_x) / 2
center_y = (min_y + max_y) / 2
center_original = rotate_point((center_x, center_y), optimal_angle)
return {
'type': 'OBB',
'corners': corners,
'width': width,
'height': height,
'area': min_area,
'angle': optimal_angle,
'center': center_original
}
def rotate_entities(acad, entities, angle, center):
"""旋转所有实体
:param acad: Autocad实例
:param entities: 实体列表
:param angle: 旋转角度(度)
:param center: 旋转中心点 (x, y)
"""
print(f"\n开始旋转 {len(entities)} 个实体,角度: {angle:.2f}度")
# 转换为弧度(AutoCAD使用弧度)
angle_rad = math.radians(angle)
base_point = APoint(center[0], center[1], 0)
rotated_count = 0
for i, entity in enumerate(entities):
try:
# 使用AutoCAD的Rotate方法
entity.Rotate(base_point, angle_rad)
rotated_count += 1
except Exception as e:
print(f"旋转对象 {i+1} 时出错: {e}")
continue
print(f"成功旋转 {rotated_count} 个对象")
return rotated_count
def draw_bounding_box(acad, box, color_index):
"""在AutoCAD中绘制包围框"""
if not box or 'corners' not in box:
return None
corners = box['corners']
model = acad.model
lines = []
for i in range(4):
p1 = APoint(corners[i][0], corners[i][1], 0)
p2 = APoint(corners[(i+1)%4][0], corners[(i+1)%4][1], 0)
line = model.AddLine(p1, p2)
line.Color = color_index
lines.append(line)
return lines
def draw_dimensions(acad, box, color_index=4, hide_border=False):
"""
在包围框上绘制长度和宽度的尺寸标注
:param acad: Autocad实例
:param box: 包围框信息字典
:param color_index: 尺寸线颜色索引(默认蓝色)
:param hide_border: 是否隐藏边界框
"""
if not box or 'corners' not in box:
return None
corners = box['corners']
model = acad.model
# 获取包围框的四个角点
p1 = APoint(corners[0][0], corners[0][1], 0) # 左下角
p2 = APoint(corners[1][0], corners[1][1], 0) # 右下角
p3 = APoint(corners[2][0], corners[2][1], 0) # 右上角
p4 = APoint(corners[3][0], corners[3][1], 0) # 左上角
# 计算尺寸线的偏移位置(距离包围框一定距离)
offset_distance = max(box['width'], box['height']) * 0.1 # 偏移10%的长度
try:
# 绘制底部宽度尺寸线(在包围框下方)
dim_start_x = APoint(corners[0][0], corners[0][1] - offset_distance, 0)
dim_end_x = APoint(corners[1][0], corners[1][1] - offset_distance, 0)
dim_x = model.AddDimAligned(p1, p2, dim_start_x)
dim_x.Color = color_index
# 绘制右侧高度尺寸线(在包围框右侧)
dim_start_y = APoint(corners[1][0] + offset_distance, corners[1][1], 0)
dim_end_y = APoint(corners[2][0] + offset_distance, corners[2][1], 0)
dim_y = model.AddDimAligned(p2, p3, dim_start_y)
dim_y.Color = color_index
print(f"已绘制尺寸标注 (蓝色): 宽度={box['width']:.3f}, 高度={box['height']:.3f}")
# 如果需要隐藏边界框,则删除边界线
if hide_border and 'border_lines' in box:
for line in box['border_lines']:
try:
line.Delete()
except:
pass
print("边界框已隐藏")
return [dim_x, dim_y]
except Exception as e:
print(f"绘制尺寸标注时出错: {e}")
return None
def draw_blue_dimensions_only(acad, box):
"""
仅绘制蓝色尺寸标注,不绘制边界框
:param acad: Autocad实例
:param box: 包围框信息字典
"""
if not box or 'corners' not in box:
return None
corners = box['corners']
model = acad.model
# 获取包围框的四个角点
p1 = APoint(corners[0][0], corners[0][1], 0) # 左下角
p2 = APoint(corners[1][0], corners[1][1], 0) # 右下角
p3 = APoint(corners[2][0], corners[2][1], 0) # 右上角
p4 = APoint(corners[3][0], corners[3][1], 0) # 左上角
# 计算尺寸线的偏移位置(距离包围框一定距离)
offset_distance = max(box['width'], box['height']) * 0.1 # 偏移10%的长度
try:
# 绘制底部宽度尺寸线(在包围框下方)
dim_start_x = APoint(corners[0][0], corners[0][1] - offset_distance, 0)
dim_end_x = APoint(corners[1][0], corners[1][1] - offset_distance, 0)
dim_x = model.AddDimAligned(p1, p2, dim_start_x)
dim_x.Color = 7 # 蓝色
# 绘制右侧高度尺寸线(在包围框右侧)
dim_start_y = APoint(corners[1][0] + offset_distance, corners[1][1], 0)
dim_end_y = APoint(corners[2][0] + offset_distance, corners[2][1], 0)
dim_y = model.AddDimAligned(p2, p3, dim_start_y)
dim_y.Color = 7 # 蓝色
print(f"已绘制蓝色尺寸标注: 宽度={box['width']:.3f}, 高度={box['height']:.3f}")
return [dim_x, dim_y]
except Exception as e:
print(f"绘制蓝色尺寸标注时出错: {e}")
return None
def analyze_rotate_and_draw(acad, entities, rotate_to_align=True, draw_boxes=False, blue_dimensions_only=True):
"""分析、旋转实体并绘制包围框
:param acad: Autocad实例
:param entities: 实体列表
:param rotate_to_align: 是否旋转实体使其轴对齐
:param draw_boxes: 是否绘制边界框
:param blue_dimensions_only: 是否仅绘制蓝色尺寸标注
"""
print(f"正在分析 {len(entities)} 个实体")
# 提取点
points = get_points_from_entities(entities)
if len(points) < 1:
print("未找到有效点")
return None
# 计算原始AABB
aabb_original = get_aabb_bounding_box(points)
if aabb_original:
print("\n原始轴对齐包围盒 (AABB):")
print(f" 尺寸: {aabb_original['width']:.3f} x {aabb_original['height']:.3f}")
print(f" 面积: {aabb_original['area']:.3f}")
# 不绘制任何标注或边界框,除了旋转后的蓝色标注
# 计算OBB
obb = get_oriented_bounding_box_approx(points)
if obb:
print("\n最小包围盒 (OBB):")
print(f" 尺寸: {obb['width']:.3f} x {obb['height']:.3f}")
print(f" 面积: {obb['area']:.3f}")
print(f" 旋转角度: {obb['angle']:.2f}度")
print(f" 中心点: ({obb['center'][0]:.3f}, {obb['center'][1]:.3f})")
# 将OBB尺寸复制到剪贴板
obb_dimensions = f"{obb['width']:.0f}x{obb['height']:.0f}"
pyperclip.copy(obb_dimensions)
print(f" OBB尺寸已复制到剪贴板: {obb_dimensions}")
if aabb_original:
saving = (1 - obb['area'] / aabb_original['area']) * 100
print(f" 相比AABB节省: {saving:.2f}%")
# 不绘制任何标注或边界框,除了旋转后的蓝色标注
# 如果需要旋转实体使其轴对齐
if rotate_to_align and len(entities) > 0:
# 旋转角度为-OBB的角度,使OBB与坐标轴对齐
rotation_angle = -obb['angle']
# 旋转所有实体
rotate_entities(acad, entities, rotation_angle, obb['center'])
# 重新计算旋转后的点
rotated_points = [rotate_point(p, rotation_angle, obb['center']) for p in points]
# 计算旋转后的AABB(应该与原来的OBB尺寸相同)
aabb_rotated = get_aabb_bounding_box(rotated_points)
if aabb_rotated:
print("\n旋转后轴对齐包围盒:")
print(f" 尺寸: {aabb_rotated['width']:.3f} x {aabb_rotated['height']:.3f}")
print(f" 面积: {aabb_rotated['area']:.3f}")
# 仅绘制旋转后的AABB蓝色尺寸标注
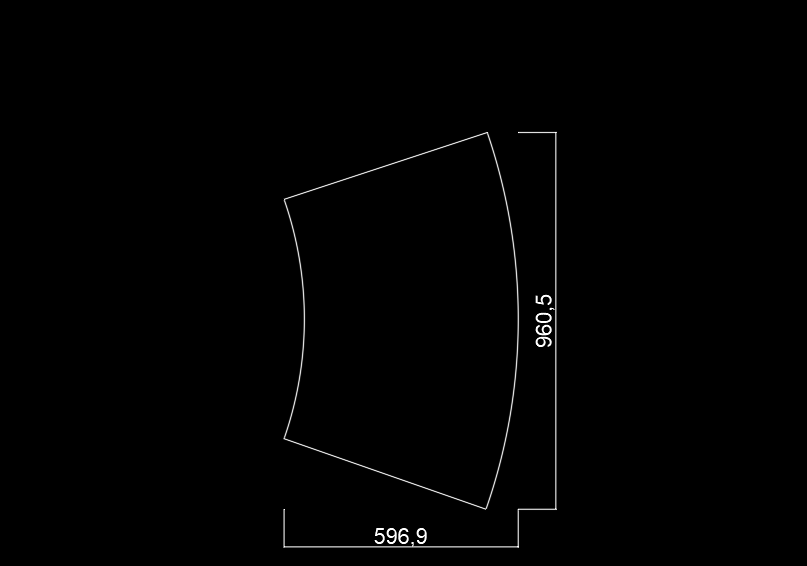
if blue_dimensions_only and not draw_boxes:
draw_blue_dimensions_only(acad, aabb_rotated)
print(" 已绘制旋转后AABB蓝色尺寸标注")
# 验证旋转后的AABB与原OBB是否一致
width_diff = abs(aabb_rotated['width'] - obb['width'])
height_diff = abs(aabb_rotated['height'] - obb['height'])
area_diff = abs(aabb_rotated['area'] - obb['area'])
print(f"\n验证结果:")
print(f" 宽度差异: {width_diff:.6f}")
print(f" 高度差异: {height_diff:.6f}")
print(f" 面积差异: {area_diff:.6f}")
if width_diff < 1e-3 and height_diff < 1e-3:
print(" ✓ 旋转后AABB与原OBB基本一致")
else:
print(" ✗ 旋转后AABB与原OBB存在较大差异")
return {
'points': points,
'aabb_original': aabb_original,
'obb': obb
}
def main():
"""主函数"""
try:
acad = Autocad(create_if_not_exists=True)
doc = acad.doc
print(f"成功连接到 AutoCAD 文档: {doc.Name}")
except Exception as e:
print("无法连接到 AutoCAD:", e)
return
try:
entities = get_selection_or_model_space(acad, doc)
if entities is None:
print("获取对象过程中发生错误,程序退出")
return
if not entities:
print("没有找到任何对象,程序退出")
return
print(f"处理 {len(entities)} 个对象")
# 控制参数
ROTATE_TO_ALIGN = True # 是否旋转实体使其轴对齐
DRAW_BOUNDING_BOXES = False # 是否绘制边界框
BLUE_DIMENSIONS_ONLY = True # 是否仅绘制蓝色尺寸标注
result = analyze_rotate_and_draw(acad, entities, ROTATE_TO_ALIGN, DRAW_BOUNDING_BOXES, BLUE_DIMENSIONS_ONLY)
if result:
if BLUE_DIMENSIONS_ONLY and not DRAW_BOUNDING_BOXES:
print("\n分析完成! 仅绘制蓝色尺寸标注,未绘制其他任何内容")
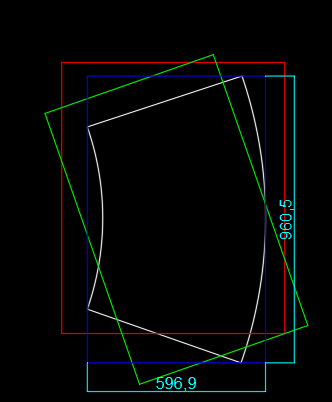
elif DRAW_BOUNDING_BOXES:
if ROTATE_TO_ALIGN:
print("\n分析完成!")
print(" 红色框: 原始AABB")
print(" 绿色框: 原始OBB")
print(" 蓝色框: 旋转后AABB(应与绿色OBB一致)")
print(" 青色标注: 旋转后AABB的长宽尺寸")
else:
print("\n分析完成!")
print(" 红色框: 原始AABB")
print(" 绿色框: 原始OBB")
else:
print("\n分析完成! 仅绘制蓝色尺寸标注")
else:
print("分析失败")
except Exception as e:
print(f"处理对象时出错: {e}")
if __name__ == "__main__":
main()