本节目标:
1)了解全局路径规划算法A*的基本原理;
2)使用C#实现A*算法;
3)使用Winform对A*算法进行仿真,更直观理解Astar算法;
下面是A*算法的Winform实现结果,运行程序后,任意点击一个位置,该位置作为开始点,再点击一个位置作为结束点,然后程序会自动从开始点向外搜索,直到搜索到结束点后停止,然后取其中距离最短的路径作为最优路径;
运行环境:
VS2013(.net framework 4.5)
1.1 算法原理
A*算法和Dijkstra算法类似,只是在其基础上叠加一个"到终点的估算距离",于是搜索方向被强行拉向目标点,速度通常快得多。本节演示的是非网络的搜索示例,搜索的边长为2,斜对角线为3,如下图所示:
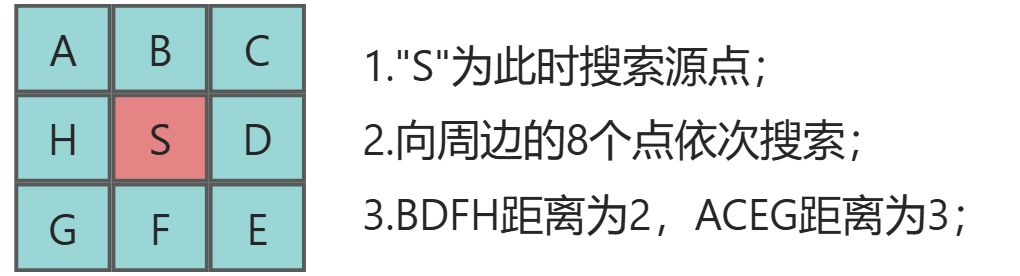
估价函数计算方式:
G(n) 为从起始节点到当前节点的路径代价;
*H(n)*为启发函数,是当前点到目标点距离的预估值,这里使用曼哈顿距离;
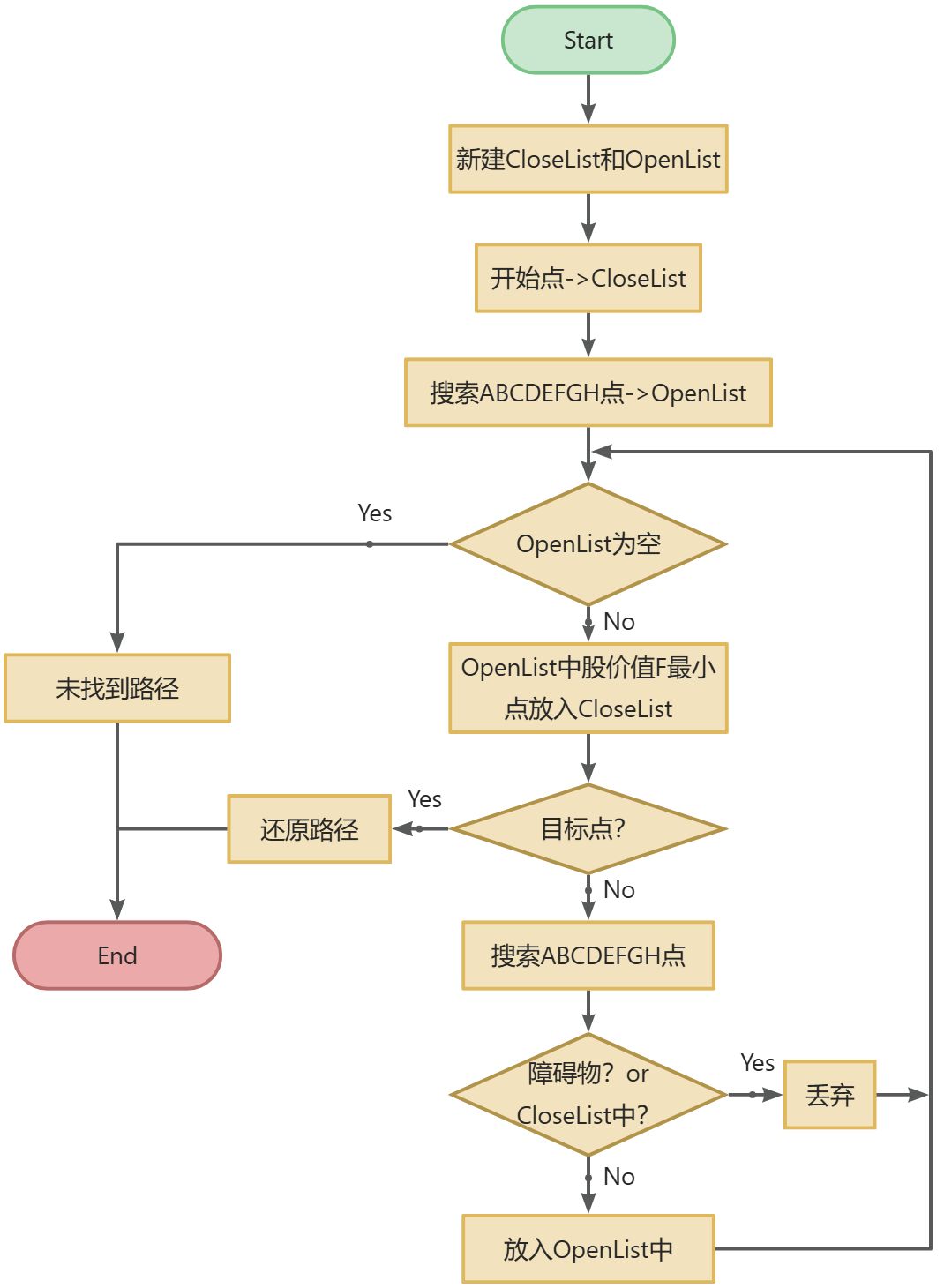
算法的基本流程:
1)新建两个点集合CloseList和OpenList,CloseList用于存放搜索过的点,OpenList用于存放待向目标点搜索的点;
2)初始化两个集合,将开始点和估价值F放入CloseList,将开始点周边未有障碍物的点和估价值F放入OpenList;
3)先判断OpenList是否为空,为空结束未找到路径,不为空,执行第4步;
4)取OpenList中第一个估价值F最小的点,将其放入CloseList中,判断其是不是目标点,如果是结束,将其路径还原出来,绘制在界面上,如果不是执行第5步;
5)依次周边的8个点搜索,判断是不是障碍物以及在没在CloseList中,如果都不是将其放入OpenList中,返回执行第3步;
流程图如下:
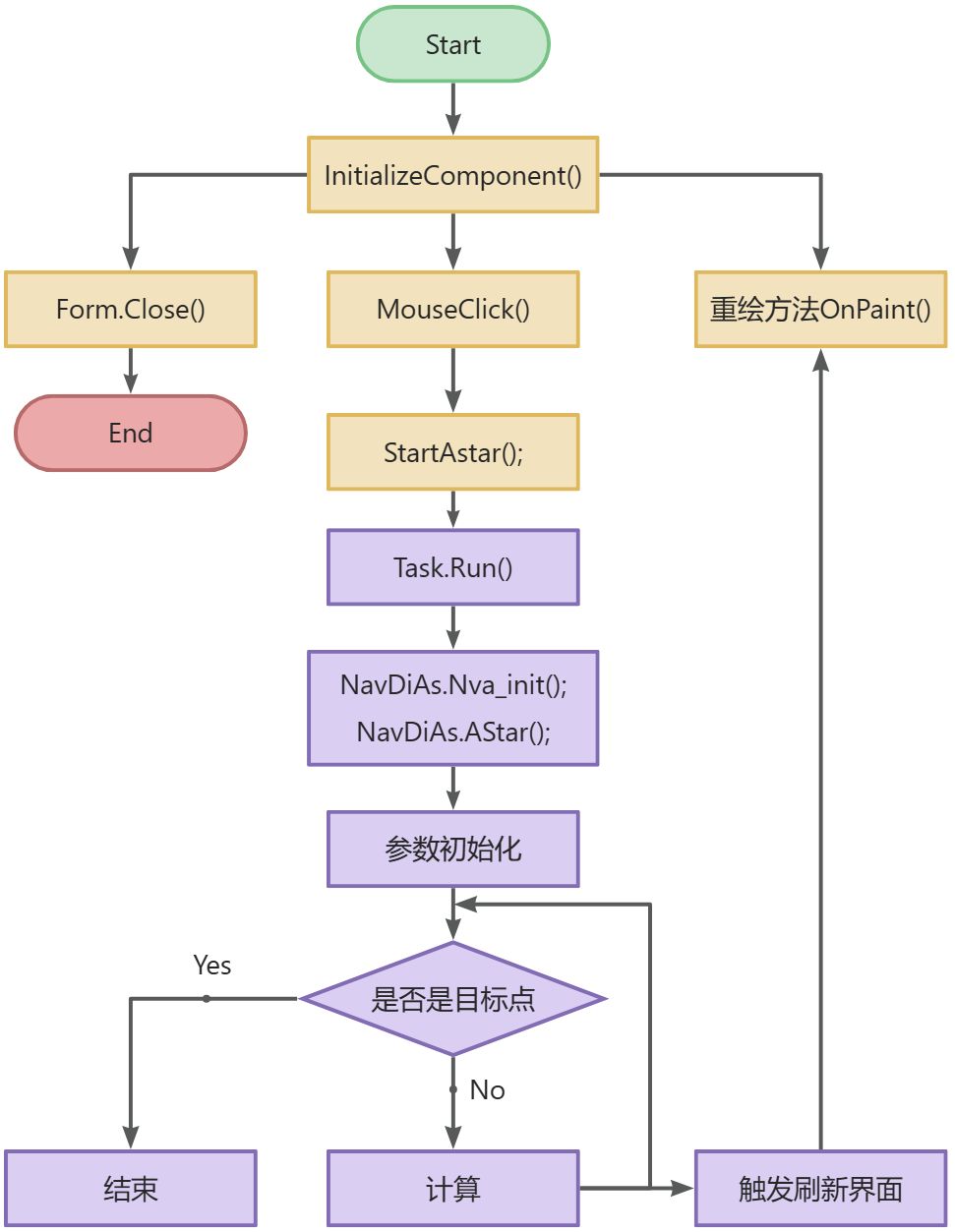
1.2 实现
根据上面对Astar算法的分析,进行C#程序设计,程序流程图如下;
1.2.1 变量
Form1.cs
cs
int paintpix;
Point[] obstacleStart = new Point[100], obstacleEnd = new Point[100];
bool bStartPointFlg;
bool bGoalPointFlg;
Point Startpoint;
Point Goalpoint;
NavAstar NavDiAs = new NavAstar();
int upvalue;1.2.2 障碍物初始化
cs
void Init()
{
//Dijkstra,Astar
paintpix = 20;
obstacleStart[0].X = (1 * paintpix);
obstacleStart[0].Y = (2 * paintpix);
obstacleEnd[0].X = (2 * paintpix);
obstacleEnd[0].Y = (23 * paintpix);
obstacleStart[1].X = (38 * paintpix);
obstacleStart[1].Y = (2 * paintpix);
obstacleEnd[1].X = (39 * paintpix);
obstacleEnd[1].Y = (23 * paintpix);
obstacleStart[2].X = (2 * paintpix);
obstacleStart[2].Y = (2 * paintpix);
obstacleEnd[2].X = (38 * paintpix);
obstacleEnd[2].Y = (3 * paintpix);
obstacleStart[3].X = (2 * paintpix);
obstacleStart[3].Y = (22 * paintpix);
obstacleEnd[3].X = (38 * paintpix);
obstacleEnd[3].Y = (23 * paintpix);
obstacleStart[4].X = (24 * paintpix);
obstacleStart[4].Y = (2 * paintpix);
obstacleEnd[4].X = (25 * paintpix);
obstacleEnd[4].Y = (16 * paintpix);
obstacleStart[5].X = (12 * paintpix);
obstacleStart[5].Y = (10 * paintpix);
obstacleEnd[5].X = (13 * paintpix);
obstacleEnd[5].Y = (23 * paintpix);
NavDiAs.OnSignal += this.reponsefunc;
upvalue = 0;
}1.2.3 重绘
cs
protected override void OnPaint(PaintEventArgs e)
{
base.OnPaint(e);
Graphics g = e.Graphics;
Point xx = new Point(), yy = new Point();
//开始点
if (bStartPointFlg)
{
//Point xx = new Point(), yy = new Point();
xx.X = ((Startpoint.X / paintpix) * paintpix);
xx.Y = ((Startpoint.Y / paintpix) * paintpix);
yy.X = ((Startpoint.X / paintpix) * paintpix + paintpix);
yy.Y = ((Startpoint.Y / paintpix) * paintpix + paintpix);
rect(xx, yy, Color.Red, g);
}
//障碍物
for (int m = 0; m <= 5; m++)
rect(obstacleStart[m], obstacleEnd[m], Color.Black, g);
//路过点显示
if (NavDiAs.bPassPointShowFlg)
{
for (int k = 0; k < NavDiAs.iPassNum; k++)
{
//Point xx = new Point(), yy = new Point();
xx.X = (NavDiAs.pPassPoint[k].X * paintpix);
xx.Y = (NavDiAs.pPassPoint[k].Y * paintpix);
yy.X = (NavDiAs.pPassPoint[k].X * paintpix + paintpix);
yy.Y = (NavDiAs.pPassPoint[k].Y * paintpix + paintpix);
rect(xx, yy, Color.YellowGreen, g);
}
}
if (NavDiAs.bFinalPassShowFlg)
{
for (int k = 0; k < NavDiAs.iFinalPassNum; k++)
{
xx.X = (NavDiAs.pFinalPassPoint[k].X * paintpix);
xx.Y = (NavDiAs.pFinalPassPoint[k].Y * paintpix);
yy.X = (NavDiAs.pFinalPassPoint[k].X * paintpix + paintpix);
yy.Y = (NavDiAs.pFinalPassPoint[k].Y * paintpix + paintpix);
rect(xx, yy, Color.Blue, g);
}
}
//结束点
if (bGoalPointFlg)
{
//Point xx = new Point(), yy = new Point();
xx.X = ((Goalpoint.X / paintpix) * paintpix);
xx.Y = ((Goalpoint.Y / paintpix) * paintpix);
yy.X = ((Goalpoint.X / paintpix) * paintpix + paintpix);
yy.Y = ((Goalpoint.Y / paintpix) * paintpix + paintpix);
rect(xx, yy, Color.Green, g);
}
}
//画矩形
void rect(Point startp, Point endp, Color color, Graphics g)
{
SolidBrush brush = new SolidBrush(color);
g.FillRectangle(brush, startp.X, startp.Y, Math.Abs(endp.X - startp.X), Math.Abs(endp.Y - startp.Y));
}
void reponsefunc() //槽函数
{
this.Invalidate();
//update();
}1.2.4 鼠标事件
cs
private void Form1_MouseClick(object sender, MouseEventArgs e)
{
if (e.Button == MouseButtons.Left && upvalue == 0)
{
Startpoint.X = (e.X);
Startpoint.Y = (e.Y);
bStartPointFlg = true;
upvalue = 1;
this.Invalidate();
}
else if (e.Button == MouseButtons.Left && upvalue == 1)
{
Goalpoint.X = (e.X);
Goalpoint.Y = (e.Y);
bGoalPointFlg = true;
upvalue = 2;
NavDiAs.startpoint.X = Startpoint.X / paintpix;
NavDiAs.startpoint.Y = Startpoint.Y / paintpix;
NavDiAs.goalpoint.X = Goalpoint.X / paintpix;
NavDiAs.goalpoint.Y = Goalpoint.Y / paintpix;
for (int m = 0; m <= 5; m++)
{
NavDiAs.obstacleStart[m].X = obstacleStart[m].X / paintpix;
NavDiAs.obstacleStart[m].Y = obstacleStart[m].Y / paintpix;
NavDiAs.obstacleEnd[m].X = obstacleEnd[m].X / paintpix;
NavDiAs.obstacleEnd[m].Y = obstacleEnd[m].Y / paintpix;
}
StartAstar();
}
else if (e.Button == MouseButtons.Left && upvalue == 2)
{
bStartPointFlg = false;
bGoalPointFlg = false;
NavDiAs.bPassPointShowFlg = false;
NavDiAs.bFinalPassShowFlg = false;
upvalue = 0;
this.Invalidate();
}
}
void StartAstar()
{
Task.Run(() =>
{
NavDiAs.Nva_init();
NavDiAs.AStar();
});
}1.2.5 算法
NavAstar.cs
cs
using System;
using System.Collections.Generic;
using System.Drawing;
using System.Linq;
using System.Text;
using System.Threading.Tasks;
namespace Winform_Astar
{
class NavAstar
{
public bool bPassPointShowFlg = false;//
public Point[] pFinalPassPoint = new Point[200];
public int iPassNum = 0;
public Point[] pPassPoint = new Point[2000];
public bool bFinalPassShowFlg = false;//Dijkstra&Astar最终路径
public int iFinalPassNum = 0;
public event Action OnSignal;//触发更新
public Point[] obstacleStart = new Point[10], obstacleEnd = new Point[10];
public Point goalpoint, startpoint;
int openlistnum = 0;
int closelistnum = 0;
liststruct openlist = new liststruct(1000);
liststruct closelist = new liststruct(1000);
static int delaytime = 10; //延迟时间
public struct liststruct
{
//public const int num = 1000;
public int[] f;
public Point[] parrant;
public Point[] curent;
public int[] value;//路径值
public string[] path;//记录路径
public liststruct(int size)
{
f = new int[size];
parrant = new Point[size];
curent = new Point[size];
value = new int[size];
path = new string[size];
}
}
public void Nva_init()
{
// point aroundpoint;//四周目标点
openlistnum = 0;
closelistnum = 0;
bPassPointShowFlg = true;
iPassNum = 0;
iFinalPassNum = 0;
ABCDEFGH_Init(startpoint, "B");
ABCDEFGH_Init(startpoint, "D");
ABCDEFGH_Init(startpoint, "F");
ABCDEFGH_Init(startpoint, "G");
ABCDEFGH_Init(startpoint, "A");
ABCDEFGH_Init(startpoint, "C");
ABCDEFGH_Init(startpoint, "E");
ABCDEFGH_Init(startpoint, "H");
closelist.curent[closelistnum].X = startpoint.X;
closelist.curent[closelistnum].Y = startpoint.Y;
closelist.value[closelistnum] = 0;
closelistnum++;
}
void ABCDEFGH_Init(Point centerpoint, string str)
{
Point targetpoint = new Point();
int ab = 0;
if (str == "B")
{
targetpoint.X = centerpoint.X;
targetpoint.Y = centerpoint.Y - 1;
ab = 2;
}
if (str == "D")
{
targetpoint.X = centerpoint.X + 1;
targetpoint.Y = centerpoint.Y;
ab = 2;
}
if (str == "F")
{
targetpoint.X = centerpoint.X;
targetpoint.Y = centerpoint.Y + 1;
ab = 2;
}
if (str == "H")
{
targetpoint.X = centerpoint.X - 1;
targetpoint.Y = centerpoint.Y;
ab = 2;
}
if (str == "A")
{
targetpoint.X = centerpoint.X - 1;
targetpoint.Y = centerpoint.Y - 1;
ab = 3;
}
if (str == "C")
{
targetpoint.X = centerpoint.X + 1;
targetpoint.Y = centerpoint.Y - 1;
ab = 3;
}
if (str == "E")
{
targetpoint.X = centerpoint.X + 1;
targetpoint.Y = centerpoint.Y + 1;
ab = 3;
}
if (str == "G")
{
targetpoint.X = centerpoint.X - 1;
targetpoint.Y = centerpoint.Y + 1;
ab = 3;
}
//碰撞检测
//bool ishit = obstacleTest(targetpoint);
if (targetpoint.X >= 0 && targetpoint.Y >= 0 && !obstacleTest(targetpoint))
{
openlist.f[openlistnum] = ab + Manhattan(targetpoint, goalpoint);
openlist.parrant[openlistnum].X = startpoint.X;
openlist.parrant[openlistnum].Y = startpoint.Y;
openlist.curent[openlistnum].X = targetpoint.X;
openlist.curent[openlistnum].Y = targetpoint.Y;
openlist.value[openlistnum] = ab;
openlist.path[openlistnum] = str;
//rect(HWnd,hDC,NewBrush,ps,targetpoint,"yellow");
pPassPoint[iPassNum] = targetpoint;
iPassNum++;
OnSignal.Invoke();
//emit ASignal();
openlistnum++;
}
}
public void AStar()
{
Point curentpoint = new Point();//中心点
int curentvalue,curentf;//中心点路程值
string curentpath;//中心点路程
int minnum,minf;
while (openlistnum!=0)
{
//取openlist中F值最小的点为中心点
minf = openlist.f[0];
minnum = 0;
for(int i=1;i<openlistnum;i++)
{
if (minf>openlist.f[i])
{
minf=openlist.f[i];
minnum = i;
}
}
//将最小路径的点放入closelist中
closelist.curent[closelistnum]=openlist.curent[minnum];
closelist.f[closelistnum]=openlist.f[minnum];
closelist.parrant[closelistnum]=openlist.parrant[minnum];
closelist.value[closelistnum]=openlist.value[minnum];
closelist.path[closelistnum]=openlist.path[minnum];
closelistnum++;
curentpoint.X = openlist.curent[minnum].X;
curentpoint.Y = openlist.curent[minnum].Y;
curentvalue = openlist.value[minnum];
curentpath = openlist.path[minnum];
curentf = openlist.f[minnum];
//删掉openlist中的最小路径的点
for(int i=minnum;i<openlistnum;i++)
{
openlist.curent[i]=openlist.curent[i+1];
openlist.f[i]=openlist.f[i+1];
openlist.parrant[i]=openlist.parrant[i+1];
openlist.value[i] = openlist.value[i+1];
openlist.path[i] = openlist.path[i+1];
}
openlistnum--;
//如果中心点是目标点,结束
if (curentpoint.X==goalpoint.X&&curentpoint.Y==goalpoint.Y)
{
//cout<<"结束"<<endl;
//cout<<curentvalue<<endl;
//cout<<curentpath<<endl;
//cout<<"("<<startpoint.x<<","<<startpoint.y<<")"<<endl;
bFinalPassShowFlg = true;
string aa;
Point pp;
pp = startpoint;
int length = curentpath.Length;
for(int j=0;j<length;j++)
{
aa = curentpath.Substring(j, 1);
if(aa=="A")
{
pp.X = pp.X-1;
pp.Y = pp.Y-1;
}
if(aa=="B")
{
pp.X = pp.X;
pp.Y = pp.Y-1;
}
if(aa=="C")
{
pp.X = pp.X+1;
pp.Y = pp.Y-1;
}
if(aa=="D")
{
pp.X = pp.X+1;
pp.Y = pp.Y;
}
if(aa=="E")
{
pp.X = pp.X+1;
pp.Y = pp.Y+1;
}
if(aa=="F")
{
pp.X = pp.X;
pp.Y = pp.Y+1;
}
if(aa=="G")
{
pp.X = pp.X-1;
pp.Y = pp.Y+1;
}
if(aa=="H")
{
pp.X = pp.X-1;
pp.Y = pp.Y;
}
//rect(HWnd,hDC,NewBrush,ps,pp,"blue");
//cout<<"("<<pp.x<<","<<pp.y<<")"<<endl;
pFinalPassPoint[iFinalPassNum] = pp;
iFinalPassNum++;
//emit ASignal();
OnSignal.Invoke();
}
//rect(HWnd,hDC,NewBrush,ps,goalpoint,"green");
break;
}
else
{
AStarABCDEFGH(curentpoint,curentvalue,"B",curentpath);
AStarABCDEFGH(curentpoint,curentvalue,"D",curentpath);
AStarABCDEFGH(curentpoint,curentvalue,"F",curentpath);
AStarABCDEFGH(curentpoint,curentvalue,"H",curentpath);
AStarABCDEFGH(curentpoint,curentvalue,"A",curentpath);
AStarABCDEFGH(curentpoint,curentvalue,"C",curentpath);
AStarABCDEFGH(curentpoint,curentvalue,"E",curentpath);
AStarABCDEFGH(curentpoint,curentvalue,"G",curentpath);
}
System.Threading.Thread.Sleep(delaytime);
}
}
void AStarABCDEFGH(Point centerpoint,int curentvalue,string str,string centerpath)
{
bool isclose = false;//在closelist中
bool isopen = false;//在openlist中
Point targetpoint = new Point();
int centervalue = 0,targetf;
string targetpath;
/*
A B C
H S D
G F E
*/
targetpath = centerpath + str;
if (str=="B")
{
targetpoint.X=centerpoint.X;
targetpoint.Y=centerpoint.Y-1;
centervalue = curentvalue+2;
}
if (str=="D")
{
targetpoint.X=centerpoint.X+1;
targetpoint.Y=centerpoint.Y;
centervalue = curentvalue+2;
}
if (str=="F")
{
targetpoint.X=centerpoint.X;
targetpoint.Y=centerpoint.Y+1;
centervalue = curentvalue+2;
}
if (str=="H")
{
targetpoint.X=centerpoint.X-1;
targetpoint.Y=centerpoint.Y;
centervalue = curentvalue+2;
}
if (str=="A")
{
targetpoint.X=centerpoint.X-1;
targetpoint.Y=centerpoint.Y-1;
centervalue = curentvalue+3;
}
if (str=="C")
{
targetpoint.X=centerpoint.X+1;
targetpoint.Y=centerpoint.Y-1;
centervalue = curentvalue+3;
}
if (str=="E")
{
targetpoint.X=centerpoint.X+1;
targetpoint.Y=centerpoint.Y+1;
centervalue = curentvalue+3;
}
if (str=="G")
{
targetpoint.X=centerpoint.X-1;
targetpoint.Y=centerpoint.Y+1;
centervalue = curentvalue+3;
}
targetf = centervalue + Manhattan(targetpoint,goalpoint);
//是否在closelist中
for(int i=0;i<closelistnum;i++)
{
if((targetpoint.X==closelist.curent[i].X)&&(targetpoint.Y==closelist.curent[i].Y))
isclose = true;
}
//碰撞检测
//bool ishit=false;
if(!isclose&&targetpoint.X>=0&&targetpoint.Y>=0&&!obstacleTest(targetpoint))
{
int isopennum = 0;
isopen = false;
//是否在openlist中
for(int i=0;i<openlistnum;i++)
{
if((targetpoint.X==openlist.curent[i].X)&&(targetpoint.Y==openlist.curent[i].Y))
{
isopen = true;
isopennum = i;
}
}
if(!isopen)
{
openlist.f[openlistnum]=targetf;
openlist.parrant[openlistnum].X = centerpoint.X;
openlist.parrant[openlistnum].Y = centerpoint.Y;
openlist.curent[openlistnum].X = targetpoint.X;
openlist.curent[openlistnum].Y = targetpoint.Y;
openlist.value[openlistnum] = centervalue;
openlist.path[openlistnum] = targetpath;
Point paintstart = new Point();
paintstart.X = targetpoint.X;
paintstart.Y = targetpoint.Y;
//rect(HWnd,hDC,NewBrush,ps,paintstart,"yellow");
pPassPoint[iPassNum] = targetpoint;
iPassNum ++;
//emit ASignal();
OnSignal.Invoke();
openlistnum ++;
}
else
{
if(centervalue<openlist.value[isopennum])
{
openlist.f[isopennum]=targetf;
openlist.parrant[isopennum].X = centerpoint.X;
openlist.parrant[isopennum].Y = centerpoint.Y;
openlist.curent[isopennum].X = targetpoint.X;
openlist.curent[isopennum].Y = targetpoint.Y;
openlist.value[isopennum] = centervalue;
openlist.path[isopennum] = targetpath;
}
}
}
}
bool obstacleTest(Point targetpoint) //碰撞检测
{
bool ishit = false;
for (int m = 0; m <= 5; m++)
{
if (targetpoint.X >= obstacleStart[m].X && targetpoint.X < obstacleEnd[m].X
&& targetpoint.Y >= obstacleStart[m].Y && targetpoint.Y < obstacleEnd[m].Y)
ishit = true;
}
return ishit;
}
int Manhattan(Point p1, Point p2)
{
int m;
m = Math.Abs(p1.X - p2.X) + Math.Abs(p1.Y - p2.Y);
return m * 2;
}
}
}1.3 运行
下面是Astar算法的Winform实现结果,运行程序后,任意点击一个位置,该位置作为开始点,再点击一个位置作为结束点,然后程序会自动从开始点向外搜索,直到搜索到结束点后停止,然后取其中距离最短的路径作为最优路径。
该算法明显比Dijkstra算法的搜索效率高。
- 权值全为非负,且能轻松估算剩余距离 → A*(绝大多数游戏、地图、机器人);
- 权值复杂/无法估算/剩余距离=0 → Dijkstra(或 Bellman-Ford 负权);
- 负权边 → Bellman-Ford / SPFA;