一、无人机影像的裁剪
目的:
将所研究的对象裁剪出来,方便以后参数的计算,并且提高参数的精度
具体落实:
将图像导入ENVI,在Layer Manager处右击,选择New Region of Interest,接着选择多变形的框图,开始框选,框选后右击选择第一个就会看到所裁剪的区域;
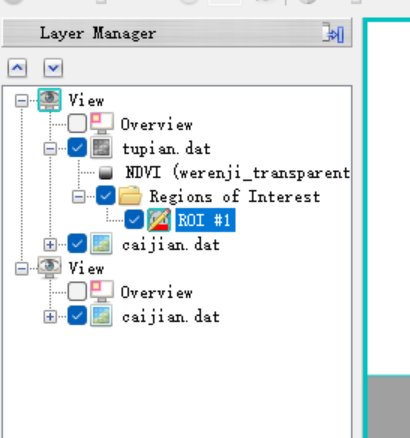
图1
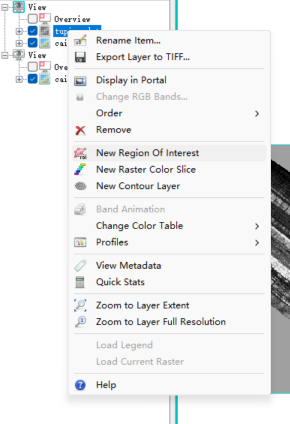
图2
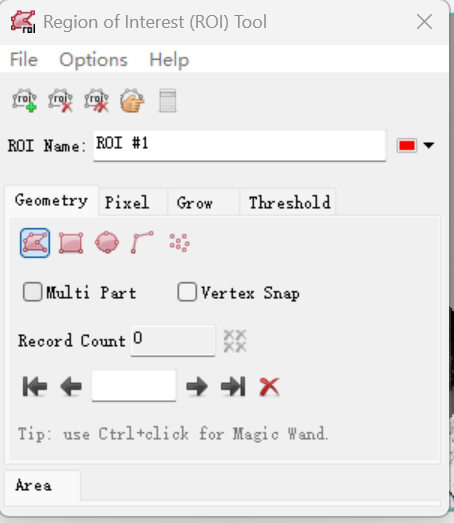
图3
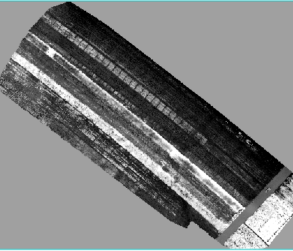
图4

图5
二、无人机影响的辐射定标
2.1 核心原理
辐射定标本质是线性转换:L=Gain×DN+Offset(辐射亮度)或 ρ=a×DN+b(地表反射率)。现场校准板的作用是提供 "已知真实值(ρ标准)" 和 "影像对应 DN 值(DN实测)",通过至少 2 块不同反射率的校准板,建立方程组求解线性系数(Gain/Offset 或 a/b),最终应用于整幅影像。
1. 标准校准板要求
核心参数:需已知各波段反射率(实验是:25% 50% 75%,精度越高越好)
2. 无人机数据准备
原始影像:需包含校准板的单张无人机影像(.DNG/.JPG 格式,用于提取校准板 DN 值;若已用 Pix4D 拼接,需确保拼接影像中校准板区域完整、无拼接畸变);
Pix4D 拼接影像:最终处理对象(TIFF/GeoTIFF 格式,含地理坐标,需确认校准板在拼接影像中可清晰识别);
辅助参数:从 Pix4D 飞行日志或无人机飞控中提取太阳高度角(用于反射率计算)、飞行高度(可选)。
2.2核心流程
步骤 1:在拼接影像中定位校准板
无论用 ENVI 还是 QGIS,先找到校准板在拼接影像中的位置:
导入 Pix4D 拼接后的多光谱正射影像;
- 结合现场拍摄的校准板照片,通过 "地理坐标" 或 "地物特征"(如校准板周围的标志物),在影像中精准圈定校准板区域(避免包含背景地物)。
步骤 2:提取校准板的影像 DN 值(关键!确保准确性)
需为每块校准板、每个波段提取 "均匀区域的 DN 值均值"(避免边缘和噪声影响):
方法 1:ENVI 提取 DN 值
- 打开 ENVI,导入 Pix4D 拼接影像;
- 打开【ROI Tool】(快捷键 R),选择【Polygon ROI】(多边形 ROI),沿校准板边缘绘制 ROI(仅包含校准板中心均匀区域,避开边缘 1~2 像素);
- 右键 ROI→【Rename】,标注校准板反射率(如 "ROI_30% 灰板");
- 重复步骤 2-3,为所有校准板绘制独立 ROI;
- 点击【Basic Tools】→【Statistics】→【Compute Statistics】,选择拼接影像和所有 ROI,勾选【Per Band】(逐波段统计),点击【OK】;
- 在统计结果中提取每块校准板、每个波段的【Mean】(DN 值均值,记为DN30%、DN50%、DN80%)。
具体图片操作不够准确,还未计算出反射率参数