本文给出介绍和matlab程序,来实现地磁辅助惯性导航仿真验证,包含地磁基准图构建、飞行轨迹生成、INS误差建模、地磁匹配定位及多源数据融合等模块。通过对比分析验证地磁匹配修正惯性导航累积误差的有效性,可视化显示卫星拒止环境下的航迹修正效果。
文章目录
研究简述
基于地磁特征匹配,定位与滤波。滤波使用扩展卡尔曼滤波(EKF)的松组。程序模拟了移动物体在二维平面上的圆周运动,并通过融合地磁传感器和惯性测量单元(IMU)数据实现高精度定位。
核心功能
- 地磁特征地图生成
- 创建100×100的二维地磁强度分布图
- 模拟真实环境中的地磁场三维分量(Bx, By, Bz)及总强度
- 运动轨迹模拟
- 生成圆形运动轨迹(半径20m,中心点50,50)
- 模拟传感器测量数据:
- 地磁强度测量(含噪声)
- IMU加速度测量(含噪声)
- 地磁独立定位
- 通过地磁特征匹配算法进行初步定位
- 计算测量磁场与地图磁场的相似度
- 找出最佳匹配位置作为观测值
- EKF松组合融合
- 预测步骤: 利用IMU加速度数据和运动学模型预测状态
- 更新步骤: 使用地磁定位结果修正预测状态
- 状态向量: x , y , v x , v y x, y, vx, vy x,y,vx,vy (位置和速度)
- 实现了纯惯导、地磁观测和融合估计三种定位方式的对比
技术特点
- 松组合架构: 地磁定位和IMU积分相互独立,通过EKF进行信息融合
- 噪声建模: 考虑了传感器测量噪声和过程噪声
- 自适应观测: 可设置地磁观测频率,模拟实际应用场景
- 性能评估: 提供详细的误差统计和可视化对比
输出结果
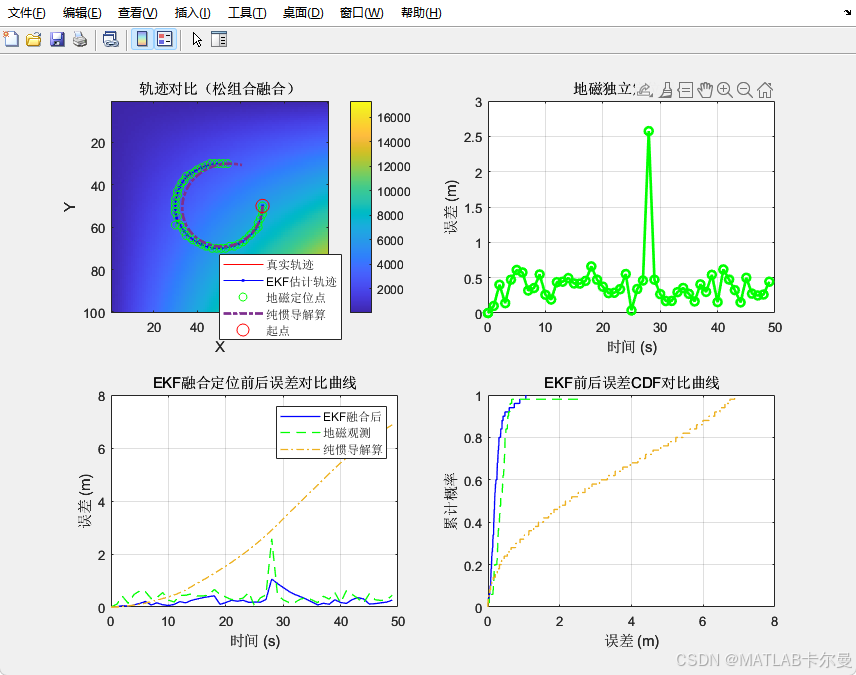
程序生成多个可视化图表:
- 轨迹对比图(含地磁地图背景)
- 地磁独立定位误差曲线
- 融合前后误差对比曲线
- 误差累积分布函数(CDF)对比
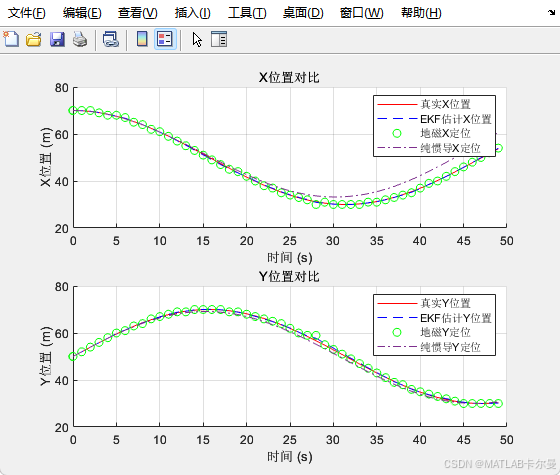
- X/Y坐标分量时域对比
同时输出定量性能指标:平均误差、最大误差、改进百分比等。
MATLAB源代码
部分源代码:
matlab
% 基于地磁特征匹配,定位与滤波
% 如需付费咨询或定制,可联系V:matlabfilter(仅此一家,其他的为盗版店铺)
% 2025-09-14/Ver1
clear; clc; close all;
rng(0);
%% 参数设置
dt = 1; % 时间步长 (s)
T = 50; % 总仿真时间 (s)
N = T / dt; % 总步数
mapSize = 100; % 地图大小
noiseLevel_mag = 0.01; % 地磁噪声强度
noiseLevel_imu = 0.01; % IMU噪声强度
mag_measurement_freq = 1; % 地磁测量频率:每1步测量一次
%% 地磁特征地图生成完整代码:
https://download.csdn.net/download/callmeup/91949957
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者