🎬 博主名称 :月夜的风吹雨
🔥 个人专栏 : 《C语言》《基础数据结构》《C++入门到进阶》
💬 前言
我们将手写完整实现,详解删除操作的四种情况,并对比key和key/value两种设计模式。当面试官问二叉搜索树,你将从容不迫,娓娓道来。
✨ 阅读后,你将掌握:
- 二叉搜索树的精准定义与不变式
- 插入、查找、删除的完整实现逻辑
- 删除操作中替换法的深度剖析
- key与key/value两种应用场景的本质区别
- 二叉搜索树在STL中的演进路线
文章目录
- 一、二叉搜索树⚖️
-
- [1.1 什么是二叉搜索树?](#1.1 什么是二叉搜索树?)
- [1.2 二叉搜索树 vs 二叉树 vs 堆](#1.2 二叉搜索树 vs 二叉树 vs 堆)
- [二、性能分析:从最佳到最坏 ⚡](#二、性能分析:从最佳到最坏 ⚡)
-
- [2.1 理想vs现实:树的形态决定性能](#2.1 理想vs现实:树的形态决定性能)
- [2.2 二叉搜索树 vs 二分查找](#2.2 二叉搜索树 vs 二分查找)
- 三、核心操作1:插入✍️
-
- [3.1 插入算法](#3.1 插入算法)
- [3.2 插入过程可视化](#3.2 插入过程可视化)
- 四、核心操作2:查找🔍
-
- [4.1 基本查找](#4.1 基本查找)
- [4.2 查找中序第一个节点(处理重复值)](#4.2 查找中序第一个节点(处理重复值))
- [五、核心操作3:删除 🔥](#五、核心操作3:删除 🔥)
-
- [5.1 删除操作的四种情况](#5.1 删除操作的四种情况)
- [5.2 替换法删除的深入解析](#5.2 替换法删除的深入解析)
- [六、完整实现:从节点到树 🌲](#六、完整实现:从节点到树 🌲)
-
- [6.1 基础二叉搜索树实现](#6.1 基础二叉搜索树实现)
- [6.2 复制构造与赋值运算符](#6.2 复制构造与赋值运算符)
- [七、两种设计模式:key与key/value 🔄](#七、两种设计模式:key与key/value 🔄)
-
- [7.1 key-only模式:搜索存在性](#7.1 key-only模式:搜索存在性)
- [7.2 key/value模式:关联数据](#7.2 key/value模式:关联数据)
- [7.3 key/value模式实现](#7.3 key/value模式实现)
- [八、实战:单词频率统计器 📊](#八、实战:单词频率统计器 📊)
-
- [8.1 问题描述](#8.1 问题描述)
- [8.2 解决方案](#8.2 解决方案)
- [8.3 性能分析](#8.3 性能分析)
- [九、思考与总结 ✨](#九、思考与总结 ✨)
- 十二、下篇预告
一、二叉搜索树⚖️
1.1 什么是二叉搜索树?
二叉搜索树(Binary Search Tree, BST)又称二叉排序树,它或者是空树,或者具有以下性质:
- 若左子树不为空,则左子树上所有节点的值都小于等于根节点的值
- 若右子树不为空,则右子树上所有节点的值都大于等于根节点的值
- 左右子树也分别为二叉搜索树
cpp
// 二叉搜索树节点定义
template<class K>
struct BSTNode {
K _key; // 节点值
BSTNode<K>* _left; // 左孩子
BSTNode<K>* _right; // 右孩子
BSTNode(const K& key)
:_key(key), _left(nullptr), _right(nullptr) {}
};💡 关键点:
- 全局有序性:BST的有序性是递归定义的,不仅是直接子节点,而是整个子树
- 可选择是否允许重复值:根据应用场景,可选择允许或禁止重复值
- 非平衡特性:标准BST不保证平衡,这是与AVL树、红黑树的本质区别
1.2 二叉搜索树 vs 二叉树 vs 堆
| 特性 | 二叉树 | 二叉搜索树 | 堆 |
|---|---|---|---|
| 节点关系 | 无特定要求 | 左 ≤ 根 ≤ 右 | 父 ≤ 子(小堆)或 父 ≥ 子(大堆) |
| 有序性 | 无序 | 全局有序 | 局部有序 |
| 查找效率 | O(N) | 平均 O(log N),最坏 O(N) | O(N) |
| 应用场景 | 基础结构 | 快速查找 / 范围查询 | 优先级队列 |
二、性能分析:从最佳到最坏 ⚡
2.1 理想vs现实:树的形态决定性能
二叉搜索树 完全二叉树 退化成单支树
| 情况 | 树高 | 查找/插入/删除 |
|---|---|---|
| 理想情况:完全二叉树 | O(log N) | O(log N) |
| 最坏情况:退化成链表 | O(N) | O(N) |
| 平均情况:随机插入 | O(log N) | O(log N) |
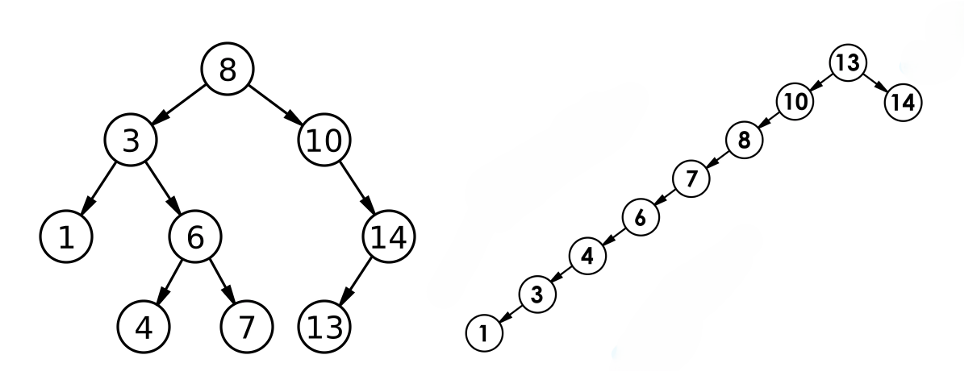
示例:
- 插入序列:
{8, 3, 1, 10, 6, 4, 7, 14, 13}→ 生成平衡树 - 插入序列:
{1, 2, 3, 4, 5, 6, 7}→ 退化成链表
2.2 二叉搜索树 vs 二分查找
二分查找也有O(logN)的时间复杂度,为何还需要二叉搜索树?
| 特性 | 二分查找 | 二叉搜索树 |
|---|---|---|
| 存储结构 | 顺序表(数组) | 链式结构 |
| 插入效率 | O(N) (需移动元素) | O(log N) (仅修改指针) |
| 删除效率 | O(N) (需移动元素) | O(log N) (仅修改指针) |
| 空间要求 | 需要连续内存 | 无需连续内存 |
| 动态性 | 静态结构 | 动态结构 |
💡 核心价值:
二叉搜索树在保持 O ( l o g N ) O(logN) O(logN)查找效率的同时,提供了高效的动态插入和删除能力,完美平衡了静态结构与动态需求。
三、核心操作1:插入✍️
3.1 插入算法
插入操作相对简单,只需按照二叉搜索树的性质找到合适位置:
cpp
bool Insert(const K& key) {
// 1. 空树,直接插入
if(_root == nullptr) {
_root = new Node(key);
return true;
}
// 2. 非空树,寻找插入位置
Node* parent = nullptr;
Node* cur = _root;
while(cur) {
if(cur->_key < key) {
parent = cur;
cur = cur->_right;
} else if(cur->_key > key) {
parent = cur;
cur = cur->_left;
} else {
// 3. 值已存在,插入失败
return false;
}
}
// 4. 创建新节点
cur = new Node(key);
if(parent->_key < key) {
parent->_right = cur;
} else {
parent->_left = cur;
}
return true;
}3.2 插入过程可视化
插入序列:{8, 3, 10, 1, 6, 14, 4, 7, 13}
1 3 4 6 7 8 10 13 14
💡 关键点:
- 插入过程不修改已有节点
- 不允许重复值时,找到相同值即返回失败
- 允许重复值时,需要约定插入方向(通常插入右子树)
四、核心操作2:查找🔍
4.1 基本查找
cpp
bool Find(const K& key) {
Node* cur = _root;
while(cur) {
if(cur->_key < key) {
cur = cur->_right;
} else if(cur->_key > key) {
cur = cur->_left;
} else {
return true; // 找到
}
}
return false; // 未找到
}4.2 查找中序第一个节点(处理重复值)
当树中允许重复值时,通常需要查找中序遍历中的第一个匹配节点:
cpp
Node* FindFirst(const K& key) {
Node* cur = _root;
Node* result = nullptr;
while(cur) {
if(cur->_key < key) {
cur = cur->_right;
} else if(cur->_key > key) {
cur = cur->_left;
} else {
// 找到匹配,继续搜索更左的节点
result = cur;
cur = cur->_left;
}
}
return result;
}💡 思考:
为什么查找比插入简单?
查找不修改树结构,只需按值遍历路径。这也是为什么大多数操作都从查找开始------它是其他操作的基础。
五、核心操作3:删除 🔥
5.1 删除操作的四种情况
删除是二叉搜索树中最复杂的操作,需要处理四种情况:
情况1&2&3:0-1个子节点
- 叶子节点:直接删除
- 只有左子树:父节点指向左子树
- 只有右子树:父节点指向右子树
cpp
// 0-1个孩子的情况
if(cur->_left == nullptr) {
// 只有右子树或无子树
if(parent == nullptr) {
_root = cur->_right;
} else {
if(parent->_left == cur) {
parent->_left = cur->_right;
} else {
parent->_right = cur->_right;
}
}
delete cur;
return true;
} else if(cur->_right == nullptr) {
// 只有左子树
if(parent == nullptr) {
_root = cur->_left;
} else {
if(parent->_left == cur) {
parent->_left = cur->_left;
} else {
parent->_right = cur->_left;
}
}
delete cur;
return true;
}情况4:2个子节点(替换法删除)
当节点有两个子节点时,无法直接删除,需用替换法:
- 找到右子树的最小节点(最左节点)或左子树的最大节点(最右节点)
- 交换值,将问题转化为删除只有一个子节点的节点
cpp
// 2个孩子的情况 - 替换法删除
Node* rightMinP = cur;
Node* rightMin = cur->_right;
while(rightMin->_left) {
rightMinP = rightMin;
rightMin = rightMin->_left;
}
// 交换值
cur->_key = rightMin->_key;
// 删除rightMin节点
if(rightMinP->_left == rightMin) {
rightMinP->_left = rightMin->_right;
} else {
rightMinP->_right = rightMin->_right;
}
delete rightMin;
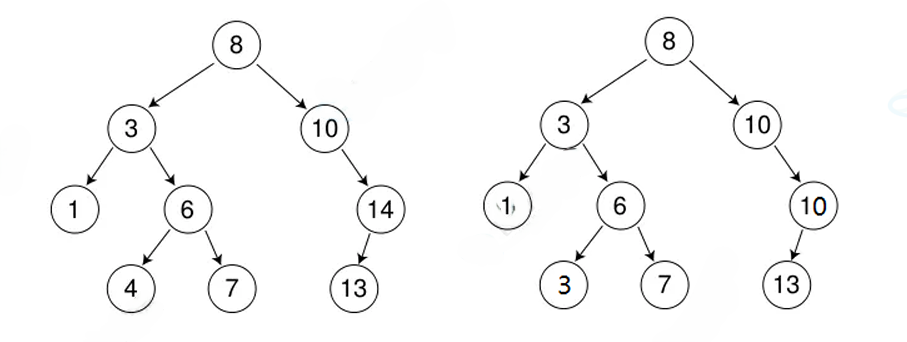
return true;5.2 替换法删除的深入解析
替换法是二叉搜索树删除操作的核心难点,让我们深入分析:
1 3 4 6 7 8 10 13 14
删除8的步骤:
- 找到右子树(10)的最小节点13
- 交换8和13的值
- 删除原13的位置(此时13是叶子节点,直接删除)
1 3 4 6 7 10 13 14
💡 为什么选择右子树最小节点 或左子树最大节点?
- 保证替换后的值仍然大于左子树所有节点
- 保证替换后的值仍然小于右子树除替换节点外的所有节点
- 右子树最小节点一定没有左子节点(是叶子或只有右子节点)
⚠️ 常见错误:
rightMinP = cur; 这行代码至关重要!当右子树根节点就是最小节点时(没有左孩子),rightMinP 需指向 cur 而非 cur->_right ,否则无法正确处理替换后指针连接。
六、完整实现:从节点到树 🌲
6.1 基础二叉搜索树实现
cpp
template<class K>
class BSTree {
typedef BSTNode<K> Node;
public:
BSTree() : _root(nullptr) {}
// 插入
bool Insert(const K& key);
// 查找
bool Find(const K& key);
// 删除
bool Erase(const K& key);
// 中序遍历
void InOrder() { _InOrder(_root); cout << endl; }
~BSTree() {
_Destroy(_root);
_root = nullptr;
}
private:
void _InOrder(Node* root) {
if(root == nullptr) return;
_InOrder(root->_left);
cout << root->_key << " ";
_InOrder(root->_right);
}
void _Destroy(Node* root) {
if(root == nullptr) return;
_Destroy(root->_left);
_Destroy(root->_right);
delete root;
}
Node* _root;
};6.2 复制构造与赋值运算符
为遵循C++的"三大法则",需要实现拷贝构造和赋值运算符:
cpp
BSTree(const BSTree<K>& t) {
_root = _Copy(t._root);
}
BSTree<K>& operator=(BSTree<K> t) {
swap(_root, t._root);
return *this;
}
Node* _Copy(Node* root) {
if(root == nullptr) return nullptr;
Node* newRoot = new Node(root->_key);
newRoot->_left = _Copy(root->_left);
newRoot->_right = _Copy(root->_right);
return newRoot;
}💡 现代C++技巧:
赋值运算符使用拷贝-交换技巧实现强异常安全,接收参数时使用值传递,充分利用移动语义。
七、两种设计模式:key与key/value 🔄
7.1 key-only模式:搜索存在性
特点:
- 仅存储键值
- 适用于判断元素是否存在
- 不允许修改键值(会破坏BST性质)
cpp
// 小区无人值守车库
class ParkingSystem {
private:
BSTree<string> _licensePlates; // 存储已授权车牌
public:
bool CanEnter(const string& licensePlate) {
return _licensePlates.Find(licensePlate);
}
void AddAuthorizedPlate(const string& licensePlate) {
_licensePlates.Insert(licensePlate);
}
};7.2 key/value模式:关联数据
特点:
- 存储键值对
- 可修改value值,但不能修改key
- 适合需要关联数据的场景
cpp
// 商场无人值守车库
class MallParking {
private:
struct EntryRecord {
string licensePlate;
time_t entryTime;
};
BSTree<string, time_t> _records; // 车牌 -> 入场时间
public:
void RecordEntry(const string& licensePlate) {
_records.Insert(licensePlate, time(nullptr));
}
double CalculateFee(const string& licensePlate) {
auto record = _records.Find(licensePlate);
if(!record) return 0.0;
time_t now = time(nullptr);
double hours = difftime(now, record->_value) / 3600.0;
return min(hours, 24.0) * 5.0; // 每小时5元,每天封顶
}
};7.3 key/value模式实现
cpp
template<class K, class V>
struct BSTNode {
K _key;
V _value;
BSTNode<K, V>* _left;
BSTNode<K, V>* _right;
BSTNode(const K& key, const V& value)
: _key(key), _value(value), _left(nullptr), _right(nullptr) {}
};
template<class K, class V>
class BSTree {
typedef BSTNode<K, V> Node;
public:
bool Insert(const K& key, const V& value);
Node* Find(const K& key); // 返回节点指针,可修改value
bool Erase(const K& key);
// 修改value
bool Update(const K& key, const V& newValue) {
Node* node = Find(key);
if(node) {
node->_value = newValue;
return true;
}
return false;
}
};💡 关键设计:
Find返回节点指针而非bool,允许直接修改value- 不能提供修改key的接口,会破坏BST性质
- 更新操作应通过先查找再修改实现,避免重复代码
八、实战:单词频率统计器 📊
8.1 问题描述
统计一篇文章中每个单词出现的频率,并按单词字母顺序输出。
8.2 解决方案
cpp
int main() {
string arr[] = {"苹果", "西瓜", "苹果", "西瓜", "苹果", "苹果",
"西瓜", "苹果", "香蕉", "苹果", "香蕉"};
BSTree<string, int> countTree;
for(const auto& str : arr) {
auto ret = countTree.Find(str);
if(ret == nullptr) {
// 第一次出现
countTree.Insert(str, 1);
} else {
// 已存在,计数+1
ret->_value++;
}
}
countTree.InOrder(); // 中序遍历自动按字母顺序输出
return 0;
}输出:
text
苹果:6
西瓜:3
香蕉:28.3 性能分析
- 时间复杂度: O ( N l o g M ) O(N log M) O(NlogM),N是总单词数,M是不同单词数
- 空间复杂度: O ( M ) O(M) O(M),M是不同单词数
- 优势:中序遍历自动按字母顺序输出,无需额外排序
💡 为什么用BST而非哈希表?
虽然哈希表平均 O ( 1 ) O(1) O(1)的插入和查找效率更高,但BST在以下场景更优:
- 需要按顺序输出结果
- 内存受限且节点较小
- 需要范围查询(如查找所有以"ap"开头的单词)
九、思考与总结 ✨
| 核心概念 | 关键理解 |
|---|---|
| BST不变式 | 左≤根≤右的全局性质是BST所有操作的基础 |
| 删除操作 | 替换法是删除有两个子节点的核心技巧 |
| 平衡性 | 普通BST不保证平衡,可能导致性能退化 |
| key模式 | 仅检查存在性,不允许修改key |
| key/value模式 | 存储关联数据,允许修改value但不能修改key |
| 应用价值 | BST是红黑树、AVL树等平衡树的基础 |
💡 一句话总结:
"二叉搜索树不仅是数据结构,更是一种思维方式------通过分而治之,将无序化为有序,将复杂问题分解为可管理的小问题。"
十二、下篇预告
下一篇《C++ map与set:关联式容器的深度探索》中,我们将:
- 揭秘STL中map和set的底层实现
- 深入理解红黑树如何解决BST的平衡问题
- 掌握map的operator\[\]多用途接口设计哲学
- 对比map/set与unordered_map/unordered_set的适用场景
- 用关联容器解决力扣高频难题