卡尔曼滤波估算车辆质量------matab simulink仿真模型
在车辆动力学研究以及相关工程应用中,准确估算车辆质量是个关键问题。而卡尔曼滤波作为一种高效的递归滤波器,能在存在噪声的情况下,对系统状态进行最优估计。今天咱们就聊聊如何用Matlab Simulink搭建仿真模型来通过卡尔曼滤波估算车辆质量。
卡尔曼滤波基础原理速览
卡尔曼滤波基于系统的状态空间模型,简单来讲,它通过预测和更新两个步骤来不断修正对系统状态的估计。预测步骤利用上一时刻的状态估计和系统模型来预测当前时刻的状态,更新步骤则结合最新的测量值来校正预测值。
用数学式子表示预测步骤:
matlab
% 预测状态
x_hat_minus = A * x_hat_plus + B * u;
% 预测协方差
P_minus = A * P_plus * A' + Q;这里 xhatminus 是预测的状态,A 是状态转移矩阵,xhatplus 是上一时刻校正后的状态,B 是控制输入矩阵,u 是控制输入。P_minus 是预测协方差,Q 是过程噪声协方差。
更新步骤如下:
matlab
% 卡尔曼增益
K = P_minus * H' / (H * P_minus * H' + R);
% 更新状态
x_hat_plus = x_hat_minus + K * (z - H * x_hat_minus);
% 更新协方差
P_plus = (eye(size(P_minus)) - K * H) * P_minus;K 是卡尔曼增益,H 是观测矩阵,z 是测量值,R 是测量噪声协方差。
Matlab Simulink 模型搭建
- 系统建模:在Simulink里,我们得先对车辆系统进行建模。假设车辆动力学模型可以简化为一个线性模型,例如通过力和加速度的关系来体现质量的影响。我们可以用Transfer Function模块来构建车辆动力学的传递函数关系。
- 噪声添加:为了模拟真实情况,要给系统添加噪声。使用Gaussian Noise模块分别添加过程噪声和测量噪声。过程噪声模拟系统中未知的干扰因素,测量噪声则反映传感器测量的不准确性。
- 卡尔曼滤波模块构建:这部分是核心。可以用一系列的Math Operations模块结合Memory模块来实现前面提到的卡尔曼滤波算法步骤。比如,用Matrix Multiply模块实现矩阵乘法,完成状态预测和协方差更新中的矩阵运算。
代码与Simulink结合优化
有时候,我们可能需要用Matlab代码对Simulink模型进行参数化或者后处理。例如,我们可以在Matlab脚本里设置卡尔曼滤波的初始参数,像初始状态估计 xhatplus 以及初始协方差 P_plus 等。
matlab
% 设置初始参数
x_hat_plus = [1000; 0]; % 假设初始质量估计为1000kg,速度为0
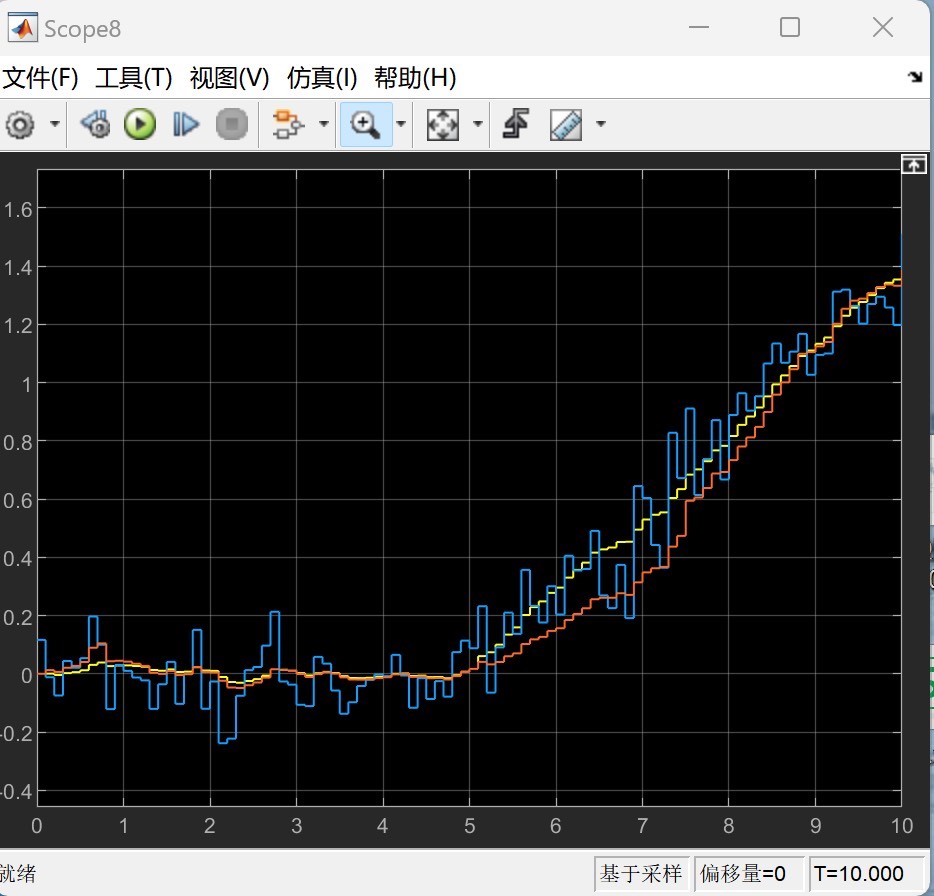
P_plus = [100 0; 0 1];运行完Simulink仿真后,我们可以用Matlab代码读取仿真结果并进行进一步分析,比如绘制车辆质量估计值随时间的变化曲线。
matlab
% 读取仿真结果
simout = sim('kalman_vehicle_mass.slx');
time = simout.time;
mass_estimation = simout.get('mass_estimate');
figure;
plot(time, mass_estimation);
xlabel('Time (s)');
ylabel('Estimated Vehicle Mass (kg)');
title('Vehicle Mass Estimation using Kalman Filter');通过Matlab Simulink搭建卡尔曼滤波估算车辆质量的仿真模型,我们能直观地看到算法在处理噪声数据时对车辆质量估计的有效性。这不仅有助于学术研究,在实际车辆工程,如自适应巡航控制、车辆稳定性控制等系统开发中也有着重要的应用价值。大家不妨动手试试,看看不同参数设置下模型的表现。