技术栈
1站--视觉搬运工业机器人工作站 -- 相机部分
PAQQ
2025-11-21 10:24
三、相机部分
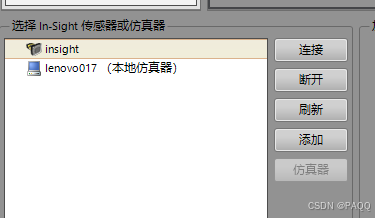
连接相机
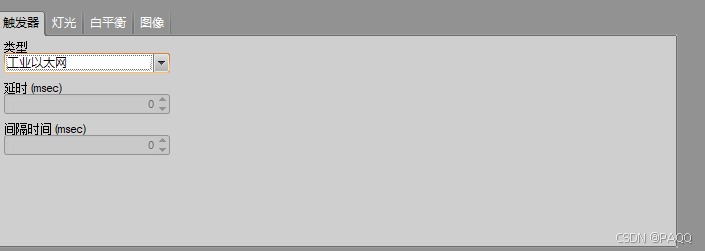
设置触发器
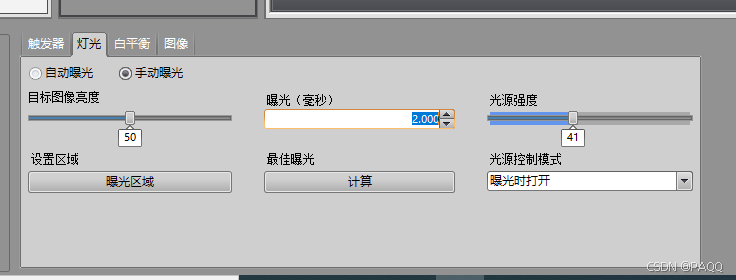
设置曝光
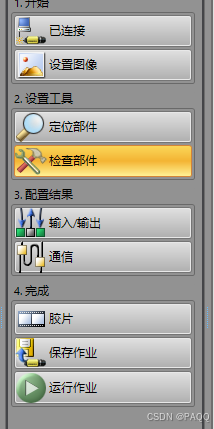
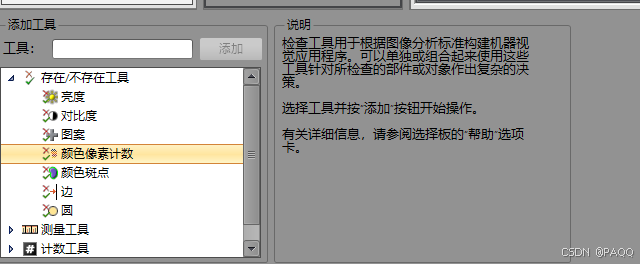
选择检查部件
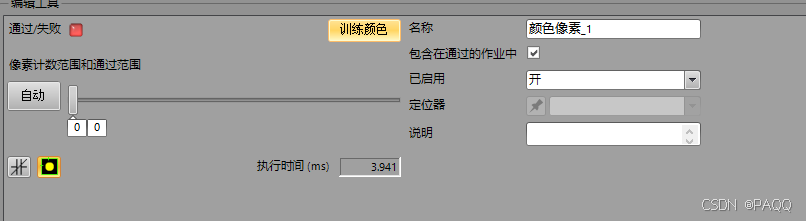
选择颜色像素计数工具
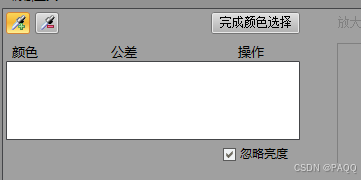
选择训练颜色
取色工具
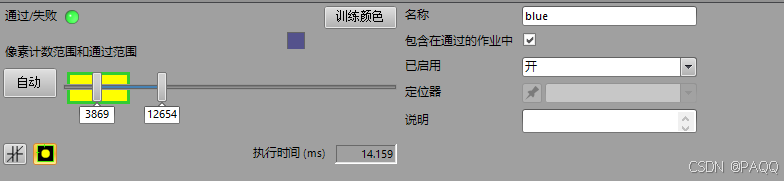
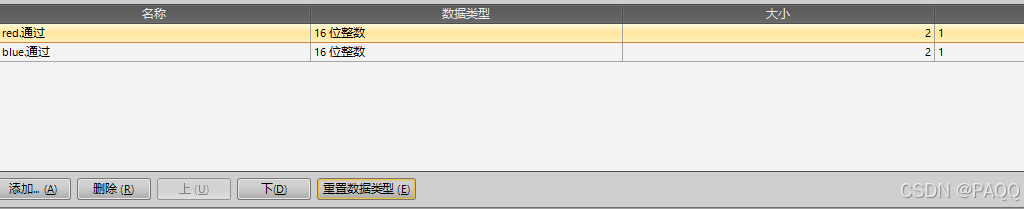
设置颜色名字
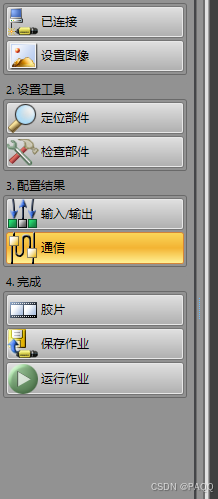
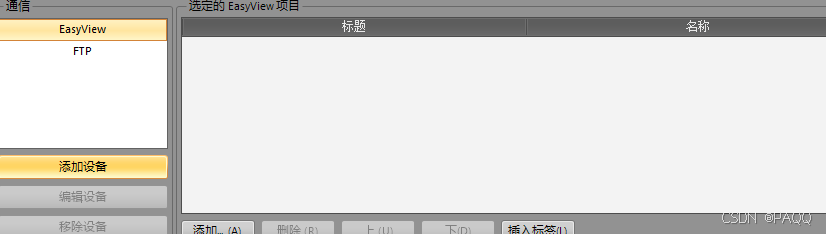
选择通信
添加设备
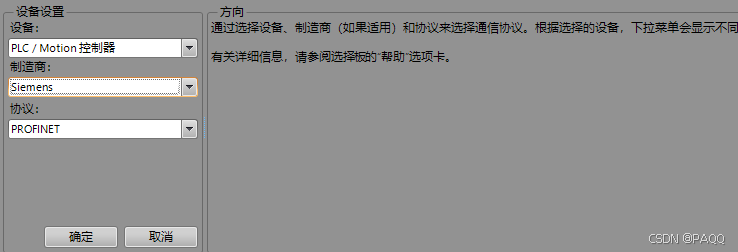
选择设备
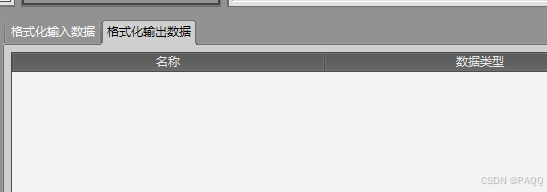
选择格式化输出
添加颜色输出
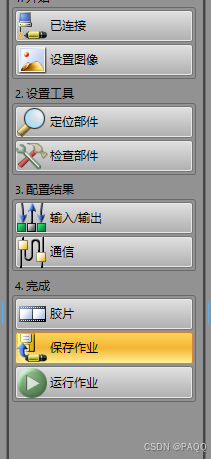
保存作业
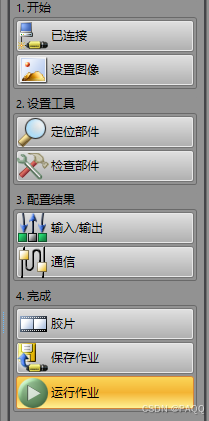
运行作业
点击联机
数码相机
机器人
上一篇:
grid: auto-fit 和 auto-fill区别
下一篇:
BPE编码从零开始实现pytorch
相关推荐
科技新芯
8 小时前
中坚科技亮相2026 WAIC:人形机器人ZERO首秀,重载四足机狗落地应用
科技
·
机器人
QYR-分析
10 小时前
智能化自动化浪潮下,机器人末端执行器行业赛道发展全景解析
人工智能
·
机器人
·
自动化
大模型服务器厂商
10 小时前
人形机器人年产冲刺 10 万台,算力底座成核心支撑
人工智能
·
机器人
沫儿笙
13 小时前
弧焊机器人氩气节气装置
人工智能
·
机器人
OAK中国_官方
14 小时前
OAK相机 IMU 和外壳标定
数码相机
不爱记笔记
15 小时前
2026 WAIC大会亮点解析!超节点、机器人与AI应用全面开花
人工智能
·
ai
·
机器人
·
具身智能
·
deepseek
猫先生Mr.Mao
15 小时前
一文梳理 RT-2 到 π0.7:通用机器人策略的技术演进
ai
·
机器人
·
具身智能
·
vla
·
π0.7
hey you~
15 小时前
2026出海语音机器人全栈选型:从ASR引擎评测到GDPR合规落地
人工智能
·
机器人
·
语音识别
FrameNotWork
15 小时前
HarmonyOS 6.0 相机开发——拍照与录像
数码相机
·
华为
·
harmonyos
song15026537298
17 小时前
M12 X-Code 8芯 PoE 相机/远程IO 针脚定义完整详解
数码相机
热门推荐
01
GitHub 镜像站点
02
2026年7月AI圈大地震:GPT-5.6被政府限制、Claude入驻Slack、Anthropic自研芯片
03
如何新建文件夹? 电脑新建文件夹的4种方法
04
幻兽帕鲁 - 服务器管理员权限与 GM 命令完全指南
05
AI科技热点日报 | 2026年07月01日
06
国内可直接用、免费额度/永久免费的大模型API清单(含 SiliconFlow、火山、阿里、智谱、百度、Kimi、DeepSeek、DMXAPI 等)
07
AI 编程 IDE 全景解析 2026:Agent 全面接管开发链路
08
【AI前线观察】2026年国产开源大模型全面横评:从 DeepSeek V4 到 Kimi K3,谁才是开发者的最优选择?
09
2026 年 AI 大模型 & AI 编程工具实战全总结
10
2026 国产 AI 大模型横评:DeepSeek、通义千问、Kimi、文心一言、星火、豆包谁更能打?