原子-梯形加减速


c
/**
****************************************************************************************************
* @file stepper_motor.c
* @author 正点原子团队(ALIENTEK)
* @version V1.0
* @date 2021-10-14
* @brief 步进电机 驱动代码
* @license Copyright (c) 2020-2032, 广州市星翼电子科技有限公司
****************************************************************************************************
* @attention
*
* 实验平台:正点原子 F407电机开发板
* 在线视频:www.yuanzige.com
* 技术论坛:www.openedv.com
* 公司网址:www.alientek.com
* 购买地址:openedv.taobao.com
*
* 修改说明
* V1.0 20211014
* 第一次发布
*
****************************************************************************************************
*/
#include "./BSP/STEPPER_MOTOR/stepper_motor.h"
#include "./BSP/TIMER/stepper_tim.h"
#include "math.h"
/**
* @brief 初始化步进电机相关IO口, 并使能时钟
* @param arr: 自动重装值
* @param psc: 时钟预分频数
* @retval 无
*/
void stepper_init(uint16_t arr, uint16_t psc)
{
GPIO_InitTypeDef gpio_init_struct;
STEPPER_DIR1_GPIO_CLK_ENABLE(); /* DIR1时钟使能 */
STEPPER_DIR2_GPIO_CLK_ENABLE(); /* DIR2时钟使能 */
STEPPER_DIR3_GPIO_CLK_ENABLE(); /* DIR3时钟使能 */
STEPPER_DIR4_GPIO_CLK_ENABLE(); /* DIR4时钟使能 */
STEPPER_EN1_GPIO_CLK_ENABLE(); /* EN1时钟使能 */
STEPPER_EN2_GPIO_CLK_ENABLE(); /* EN2时钟使能 */
STEPPER_EN3_GPIO_CLK_ENABLE(); /* EN3时钟使能 */
STEPPER_EN4_GPIO_CLK_ENABLE(); /* EN4时钟使能 */
gpio_init_struct.Pin = STEPPER_DIR1_GPIO_PIN; /* DIR1引脚 */
gpio_init_struct.Mode = GPIO_MODE_OUTPUT_PP; /* 推挽输出 */
gpio_init_struct.Pull = GPIO_PULLDOWN; /* 下拉 */
gpio_init_struct.Speed = GPIO_SPEED_FREQ_LOW; /* 低速 */
HAL_GPIO_Init(STEPPER_DIR1_GPIO_PORT, &gpio_init_struct); /* 初始化DIR1引脚 */
gpio_init_struct.Pin = STEPPER_DIR2_GPIO_PIN; /* DIR2引脚 */
HAL_GPIO_Init(STEPPER_DIR2_GPIO_PORT, &gpio_init_struct); /* 初始化DIR2引脚 */
gpio_init_struct.Pin = STEPPER_DIR3_GPIO_PIN; /* DIR3引脚 */
HAL_GPIO_Init(STEPPER_DIR3_GPIO_PORT, &gpio_init_struct); /* 初始化DIR3引脚 */
gpio_init_struct.Pin = STEPPER_DIR4_GPIO_PIN; /* DIR4引脚 */
HAL_GPIO_Init(STEPPER_DIR4_GPIO_PORT, &gpio_init_struct); /* 初始化DIR4引脚 */
/* 脱机引脚初始化 */
gpio_init_struct.Pin = STEPPER_EN1_GPIO_PIN; /* EN1引脚 */
HAL_GPIO_Init(STEPPER_EN1_GPIO_PORT, &gpio_init_struct); /* 初始化EN1引脚 */
gpio_init_struct.Pin = STEPPER_EN2_GPIO_PIN; /* EN2引脚 */
HAL_GPIO_Init(STEPPER_EN2_GPIO_PORT, &gpio_init_struct); /* 初始化EN2引脚 */
gpio_init_struct.Pin = STEPPER_EN3_GPIO_PIN; /* EN3引脚 */
HAL_GPIO_Init(STEPPER_EN3_GPIO_PORT, &gpio_init_struct); /* 初始化EN3引脚 */
gpio_init_struct.Pin = STEPPER_EN4_GPIO_PIN; /* EN4引脚 */
HAL_GPIO_Init(STEPPER_EN4_GPIO_PORT, &gpio_init_struct); /* 初始化EN4引脚 */
atim_timx_oc_chy_init(arr, psc); /* 初始化PUL引脚,以及脉冲模式等 */
}
/**
* @brief 开启步进电机
* @param motor_num: 步进电机接口序号
* @retval 无
*/
void stepper_star(uint8_t motor_num)
{
/* 开启对应PWM通道 */
switch(motor_num)
{
case STEPPER_MOTOR_1 :
{
if(g_atimx_oc_chy_handle.OCMode == TIM_OCMODE_PWM1||g_atimx_oc_chy_handle.OCMode == TIM_OCMODE_PWM2)
{
HAL_TIM_PWM_Start(&g_atimx_handle, ATIM_TIMX_PWM_CH1);
}
if(g_atimx_oc_chy_handle.OCMode == TIM_OCMODE_TOGGLE)
{
HAL_TIM_OC_Start_IT(&g_atimx_handle, ATIM_TIMX_PWM_CH1);
}
break;
}
case STEPPER_MOTOR_2 :
{
if(g_atimx_oc_chy_handle.OCMode == TIM_OCMODE_PWM1||g_atimx_oc_chy_handle.OCMode == TIM_OCMODE_PWM2)
{
HAL_TIM_PWM_Start(&g_atimx_handle, ATIM_TIMX_PWM_CH2);
}
if(g_atimx_oc_chy_handle.OCMode == TIM_OCMODE_TOGGLE)
{
HAL_TIM_OC_Start_IT(&g_atimx_handle, ATIM_TIMX_PWM_CH2);
}
break;
}
case STEPPER_MOTOR_3 :
{
if(g_atimx_oc_chy_handle.OCMode == TIM_OCMODE_PWM1||g_atimx_oc_chy_handle.OCMode == TIM_OCMODE_PWM2)
{
HAL_TIM_PWM_Start(&g_atimx_handle, ATIM_TIMX_PWM_CH3);
}
if(g_atimx_oc_chy_handle.OCMode == TIM_OCMODE_TOGGLE)
{
HAL_TIM_OC_Start_IT(&g_atimx_handle, ATIM_TIMX_PWM_CH3);
}
break;
}
case STEPPER_MOTOR_4 :
{
if(g_atimx_oc_chy_handle.OCMode == TIM_OCMODE_PWM1||g_atimx_oc_chy_handle.OCMode == TIM_OCMODE_PWM2)
{
HAL_TIM_PWM_Start(&g_atimx_handle, ATIM_TIMX_PWM_CH4);
}
if(g_atimx_oc_chy_handle.OCMode == TIM_OCMODE_TOGGLE)
{
HAL_TIM_OC_Start_IT(&g_atimx_handle, ATIM_TIMX_PWM_CH4);
}
break;
}
default : break;
}
}
/**
* @brief 关闭步进电机
* @param motor_num: 步进电机接口序号
* @retval 无
*/
void stepper_stop(uint8_t motor_num)
{
/* 关闭对应PWM通道 */
switch(motor_num)
{
case STEPPER_MOTOR_1 :
{
if(g_atimx_oc_chy_handle.OCMode == TIM_OCMODE_PWM1||g_atimx_oc_chy_handle.OCMode == TIM_OCMODE_PWM2)
{
HAL_TIM_PWM_Stop(&g_atimx_handle, ATIM_TIMX_PWM_CH1);
}
if(g_atimx_oc_chy_handle.OCMode == TIM_OCMODE_TOGGLE)
{
HAL_TIM_OC_Stop_IT(&g_atimx_handle, ATIM_TIMX_PWM_CH1);
}
break;
}
case STEPPER_MOTOR_2 :
{
if(g_atimx_oc_chy_handle.OCMode == TIM_OCMODE_PWM1||g_atimx_oc_chy_handle.OCMode == TIM_OCMODE_PWM2)
{
HAL_TIM_PWM_Stop(&g_atimx_handle, ATIM_TIMX_PWM_CH2);
}
if(g_atimx_oc_chy_handle.OCMode == TIM_OCMODE_TOGGLE)
{
HAL_TIM_OC_Stop_IT(&g_atimx_handle, ATIM_TIMX_PWM_CH2);
}
break;
}
case STEPPER_MOTOR_3 :
{
if(g_atimx_oc_chy_handle.OCMode == TIM_OCMODE_PWM1||g_atimx_oc_chy_handle.OCMode == TIM_OCMODE_PWM2)
{
HAL_TIM_PWM_Stop(&g_atimx_handle, ATIM_TIMX_PWM_CH3);
}
if(g_atimx_oc_chy_handle.OCMode == TIM_OCMODE_TOGGLE)
{
HAL_TIM_OC_Stop_IT(&g_atimx_handle, ATIM_TIMX_PWM_CH3);
}
break;
}
case STEPPER_MOTOR_4 :
{
if(g_atimx_oc_chy_handle.OCMode == TIM_OCMODE_PWM1||g_atimx_oc_chy_handle.OCMode == TIM_OCMODE_PWM2)
{
HAL_TIM_PWM_Stop(&g_atimx_handle, ATIM_TIMX_PWM_CH4);
}
if(g_atimx_oc_chy_handle.OCMode == TIM_OCMODE_TOGGLE)
{
HAL_TIM_OC_Stop_IT(&g_atimx_handle, ATIM_TIMX_PWM_CH4);
}
break;
}
default : break;
}
}
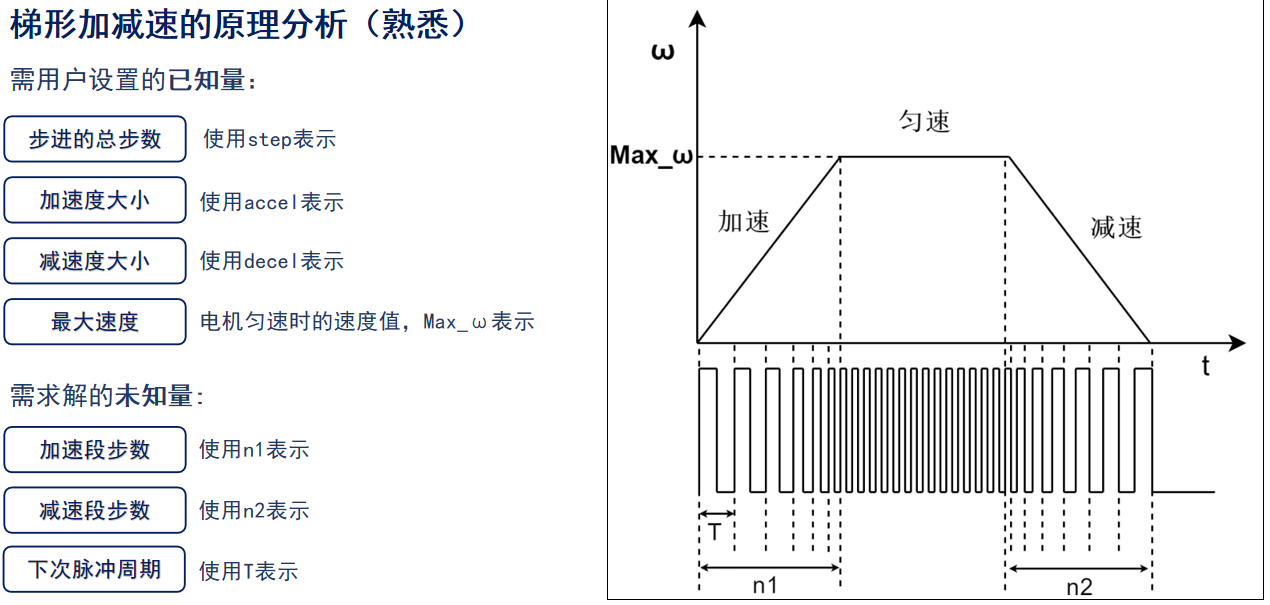
/********************************************梯形加减速***********************************************/
speedRampData g_srd = {STOP,CW,0,0,0,0,0}; /* 加减速变量 */
__IO int32_t g_step_position = 0; /* 当前位置 */
__IO uint8_t g_motion_sta = 0; /* 是否在运动?0:停止,1:运动 */
__IO uint32_t g_add_pulse_count = 0; /* 脉冲个数累计 */
/*
* @brief 生成梯形运动控制参数
* @param step:移动的步数 (正数为顺时针,负数为逆时针).
* @param accel 加速度,实际值为accel*0.1*rad/sec^2 10倍并且2个脉冲算一个完整的周期
* @param decel 减速度,实际值为decel*0.1*rad/sec^2
* @param speed 最大速度,实际值为speed*0.1*rad/sec
* @retval 无
*/
void create_t_ctrl_param(int32_t step, uint32_t accel, uint32_t decel, uint32_t speed)
{
__IO uint16_t tim_count; /* 达到最大速度时的步数*/
__IO uint32_t max_s_lim; /* 必须要开始减速的步数(如果加速没有达到最大速度)*/
__IO uint32_t accel_lim;
if(g_motion_sta != STOP) /* 只允许步进电机在停止的时候才继续*/
return;
if(step < 0) /* 步数为负数 */
{
g_srd.dir = CCW; /* 逆时针方向旋转 */
ST3_DIR(CCW);
step = -step; /* 获取步数绝对值 */
}
else
{
g_srd.dir = CW; /* 顺时针方向旋转 */
ST3_DIR(CW);
}
if(step == 1) /* 步数为1 */
{
g_srd.accel_count = -1; /* 只移动一步 */
g_srd.run_state = DECEL; /* 减速状态. */
g_srd.step_delay = 1000; /* 默认速度 */
}
else if(step != 0) /* 如果目标运动步数不为0*/
{
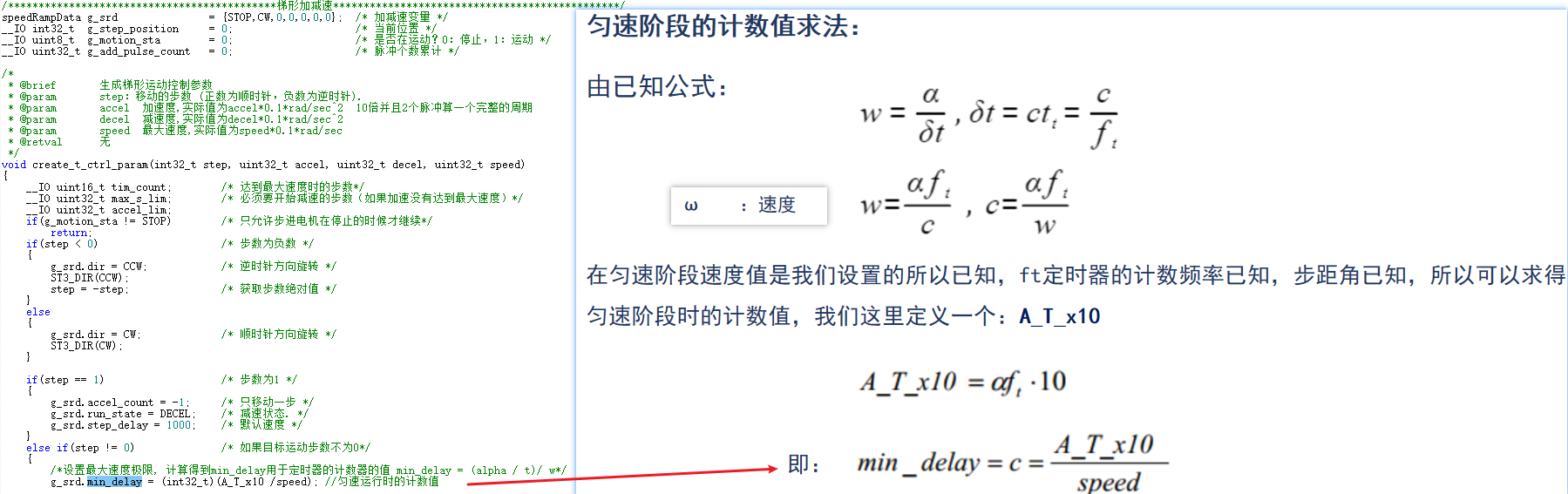
/*设置最大速度极限, 计算得到min_delay用于定时器的计数器的值 min_delay = (alpha / t)/ w*/
g_srd.min_delay = (int32_t)(A_T_x10 /speed); //匀速运行时的计数值
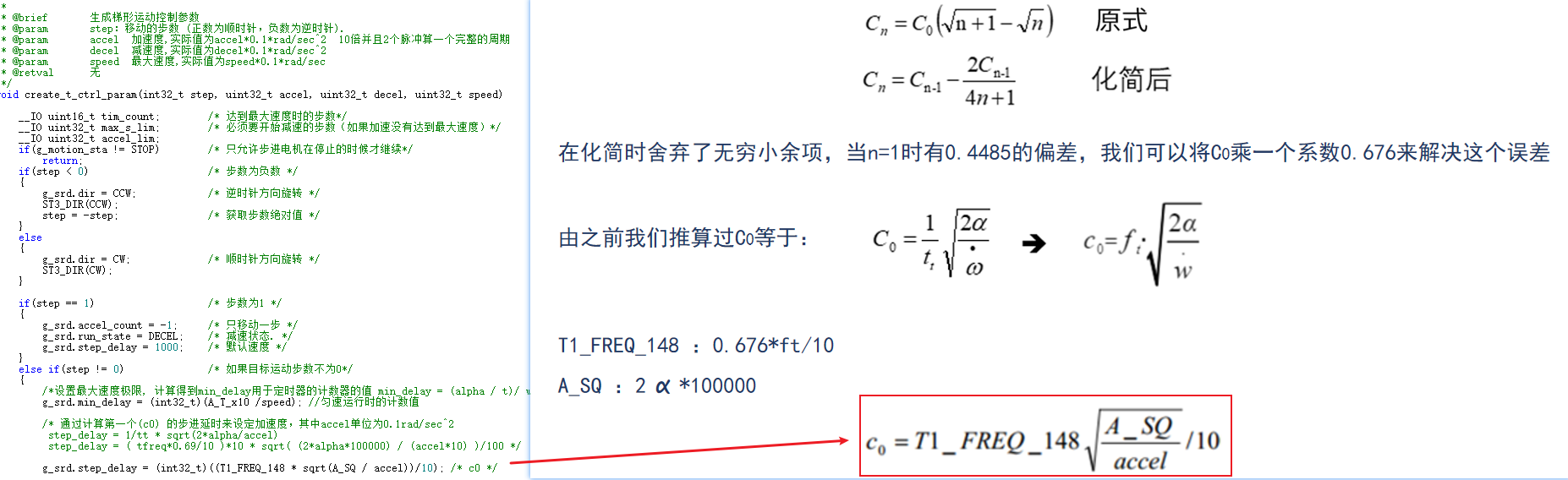
/* 通过计算第一个(c0) 的步进延时来设定加速度,其中accel单位为0.1rad/sec^2
step_delay = 1/tt * sqrt(2*alpha/accel)
step_delay = ( tfreq*0.69/10 )*10 * sqrt( (2*alpha*100000) / (accel*10) )/100 */
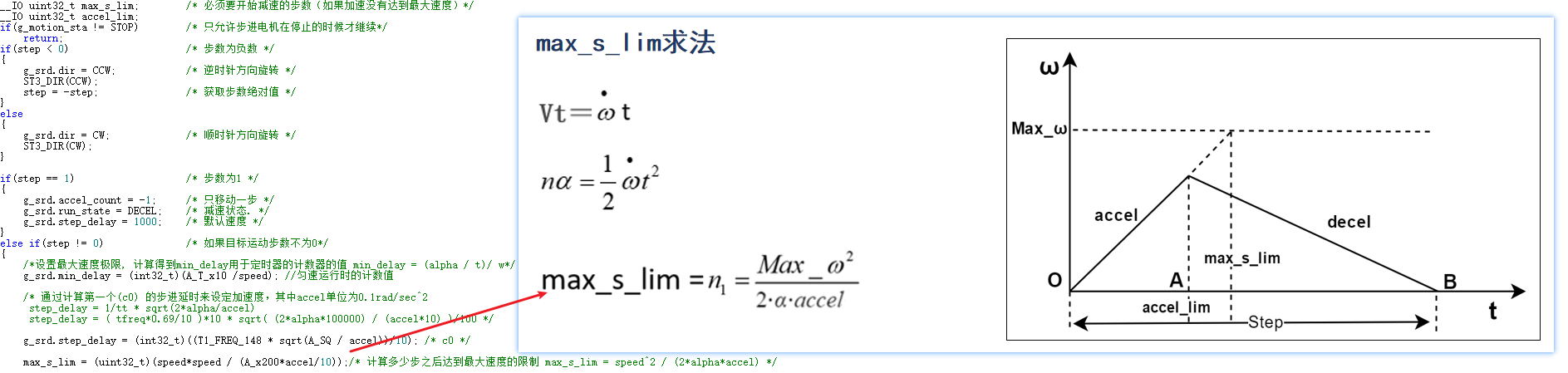
g_srd.step_delay = (int32_t)((T1_FREQ_148 * sqrt(A_SQ / accel))/10); /* c0 */
max_s_lim = (uint32_t)(speed*speed / (A_x200*accel/10));/* 计算多少步之后达到最大速度的限制 max_s_lim = speed^2 / (2*alpha*accel) */
if(max_s_lim == 0) /* 如果达到最大速度小于0.5步,我们将四舍五入为0,但实际我们必须移动至少一步才能达到想要的速度 */
{
max_s_lim = 1;
}
accel_lim = (uint32_t)(step*decel/(accel+decel)); /* 这里不限制最大速度 计算多少步之后我们必须开始减速 n1 = (n1+n2)decel / (accel + decel) */
if(accel_lim == 0) /* 不足一步 按一步处理*/
{
accel_lim = 1;
}
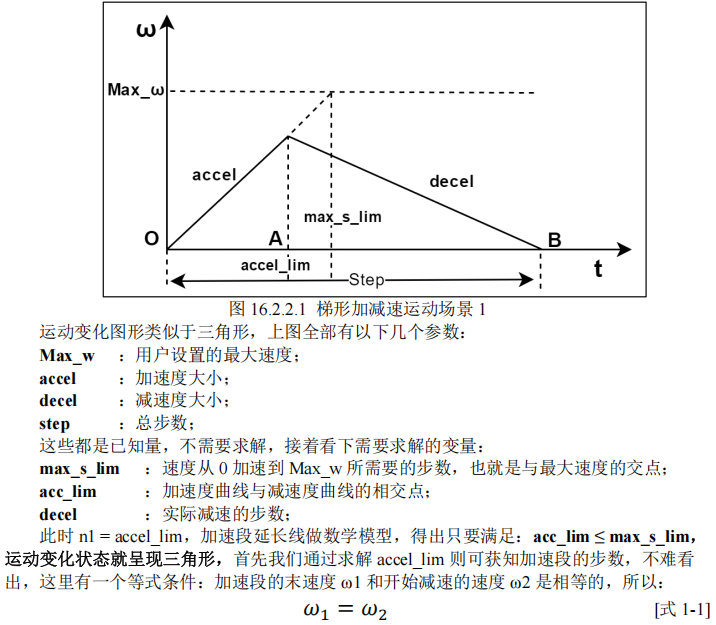
if(accel_lim <= max_s_lim) /* 加速阶段到不了最大速度就得减速。。。使用限制条件我们可以计算出减速阶段步数 */
{
g_srd.decel_val = accel_lim - step; /* 减速段的步数 */
}
else
{
g_srd.decel_val = -(max_s_lim*accel/decel); /* 减速段的步数 */
}
if(g_srd.decel_val == 0) /* 不足一步 按一步处理 */
{
g_srd.decel_val = -1;
}
g_srd.decel_start = step + g_srd.decel_val; /* 计算开始减速时的步数 */
if(g_srd.step_delay <= g_srd.min_delay) /* 如果一开始c0的速度比匀速段速度还大,就不需要进行加速运动,直接进入匀速 */
{
g_srd.step_delay = g_srd.min_delay;
g_srd.run_state = RUN;
}
else
{
g_srd.run_state = ACCEL;
}
g_srd.accel_count = 0; /* 复位加减速计数值 */
}
g_motion_sta = 1; /* 电机为运动状态 */
ST3_EN(EN_ON);
tim_count=__HAL_TIM_GET_COUNTER(&g_atimx_handle);
__HAL_TIM_SET_COMPARE(&g_atimx_handle,ATIM_TIMX_PWM_CH3,tim_count+g_srd.step_delay/2); /* 设置定时器比较值 */
HAL_TIM_OC_Start_IT(&g_atimx_handle,ATIM_TIMX_PWM_CH3); /* 使能定时器通道 */
}
/**
* @brief 定时器比较中断
* @param htim:定时器句柄指针
* @note 无
* @retval 无
*/
void HAL_TIM_OC_DelayElapsedCallback(TIM_HandleTypeDef *htim)
{
__IO uint32_t tim_count = 0;
__IO uint32_t tmp = 0;
uint16_t new_step_delay = 0; /* 保存新(下)一个延时周期 "下一个脉冲周期的Cn"*/
__IO static uint16_t last_accel_delay = 0; /* 加速过程中最后一次延时(脉冲周期) */
__IO static uint32_t step_count = 0; /* 总移动步数计数器*/
__IO static int32_t rest = 0; /* 记录new_step_delay中的余数,提高下一步计算的精度 */
__IO static uint8_t i = 0; /* 定时器使用翻转模式,需要进入两次中断才输出一个完整脉冲 */
if(htim->Instance==TIM8)
{
tim_count = __HAL_TIM_GET_COUNTER(&g_atimx_handle);
tmp = tim_count + g_srd.step_delay/2; /* 整个C值里边是需要翻转两次的所以需要除以2 */
__HAL_TIM_SET_COMPARE(&g_atimx_handle,ATIM_TIMX_PWM_CH3,tmp);
i++; /* 定时器中断次数计数值 */
if(i == 2) /* 2次,说明已经输出一个完整脉冲 */
{
i = 0; /* 清零定时器中断次数计数值 */
switch(g_srd.run_state) /* 加减速曲线阶段 */
{
case STOP:
step_count = 0; /* 清零步数计数器 */
rest = 0; /* 清零余值 */
/* 关闭通道*/
HAL_TIM_OC_Stop_IT(&g_atimx_handle, ATIM_TIMX_PWM_CH3);
ST3_EN(EN_OFF);
g_motion_sta = 0; /* 电机为停止状态 */
break;
case ACCEL:
g_add_pulse_count++; /* 只用于记录相对位置转动了多少度 */
step_count++; /* 步数加1*/
if(g_srd.dir == CW)
{
g_step_position++; /* 绝对位置加1 记录绝对位置转动多少度*/
}
else
{
g_step_position--; /* 绝对位置减1*/
}
g_srd.accel_count++; /* 加速计数值加1*/
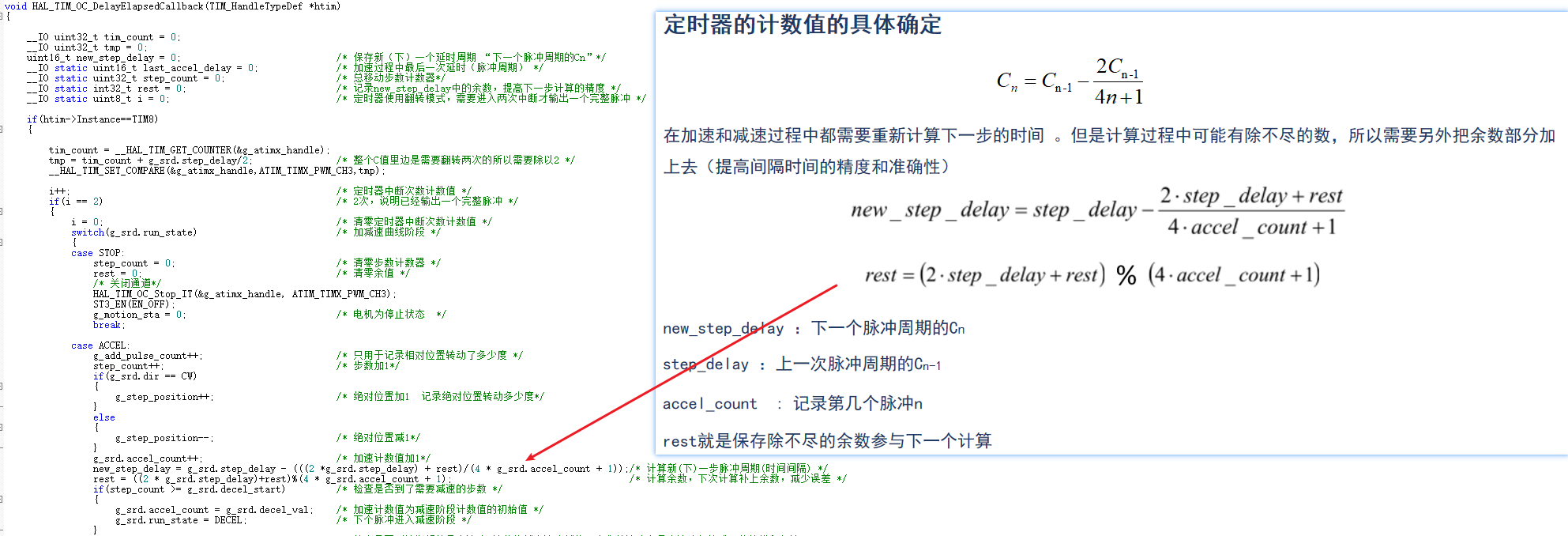
new_step_delay = g_srd.step_delay - (((2 *g_srd.step_delay) + rest)/(4 * g_srd.accel_count + 1));/* 计算新(下)一步脉冲周期(时间间隔) */
rest = ((2 * g_srd.step_delay)+rest)%(4 * g_srd.accel_count + 1); /* 计算余数,下次计算补上余数,减少误差 */
if(step_count >= g_srd.decel_start) /* 检查是否到了需要减速的步数 */
{
g_srd.accel_count = g_srd.decel_val; /* 加速计数值为减速阶段计数值的初始值 */
g_srd.run_state = DECEL; /* 下个脉冲进入减速阶段 */
}
else if(new_step_delay <= g_srd.min_delay) /* 检查是否到达期望的最大速度 计数值越小速度越快,当你的速度和最大速度相等或更快就进入匀速*/
{
last_accel_delay = new_step_delay; /* 保存加速过程中最后一次延时(脉冲周期)*/
new_step_delay = g_srd.min_delay; /* 使用min_delay(对应最大速度speed)*/
rest = 0; /* 清零余值 */
g_srd.run_state = RUN; /* 设置为匀速运行状态 */
}
break;
case RUN:
g_add_pulse_count++;
step_count++; /* 步数加1 */
if(g_srd.dir == CW)
{
g_step_position++; /* 绝对位置加1 */
}
else
{
g_step_position--; /* 绝对位置减1*/
}
new_step_delay = g_srd.min_delay; /* 使用min_delay(对应最大速度speed)*/
if(step_count >= g_srd.decel_start) /* 需要开始减速 */
{
g_srd.accel_count = g_srd.decel_val; /* 减速步数做为加速计数值 */
new_step_delay = last_accel_delay; /* 加阶段最后的延时做为减速阶段的起始延时(脉冲周期) */
g_srd.run_state = DECEL; /* 状态改变为减速 */
}
break;
case DECEL:
step_count++; /* 步数加1 */
g_add_pulse_count++;
if(g_srd.dir == CW)
{
g_step_position++; /* 绝对位置加1 */
}
else
{
g_step_position--; /* 绝对位置减1 */
}
g_srd.accel_count++;
new_step_delay = g_srd.step_delay - (((2 * g_srd.step_delay) + rest)/(4 * g_srd.accel_count + 1)); /* 计算新(下)一步脉冲周期(时间间隔) */
rest = ((2 * g_srd.step_delay)+rest)%(4 * g_srd.accel_count + 1); /* 计算余数,下次计算补上余数,减少误差 */
/* 检查是否为最后一步 */
if(g_srd.accel_count >= 0) /* 判断减速步数是否从负值加到0是的话 减速完成 */
{
g_srd.run_state = STOP;
}
break;
}
g_srd.step_delay = new_step_delay; /* 为下个(新的)延时(脉冲周期)赋值 */
}
}
}
c
/**
****************************************************************************************************
* @file stepper_motor.h
* @author 正点原子团队(ALIENTEK)
* @version V1.0
* @date 2021-10-14
* @brief 步进电机 驱动代码
* @license Copyright (c) 2020-2032, 广州市星翼电子科技有限公司
****************************************************************************************************
* @attention
*
* 实验平台:正点原子 STM32F407电机开发板
* 在线视频:www.yuanzige.com
* 技术论坛:www.openedv.com
* 公司网址:www.alientek.com
* 购买地址:openedv.taobao.com
*
* 修改说明
* V1.0 20211014
* 第一次发布
*
****************************************************************************************************
*/
#ifndef __STEPPER_MOTOR_H
#define __STEPPER_MOTOR_H
#include "./SYSTEM/sys/sys.h"
/******************************************************************************************/
#define TIM_FREQ 168000000U /* 定时器主频 */
#define MAX_STEP_ANGLE 0.225 /* 最小步距(1.8/MICRO_STEP) */
#define PAI 3.1415926 /* 圆周率*/
#define FSPR 200 /* 步进电机单圈步数 */
#define MICRO_STEP 8 /* 步进电机驱动器细分数 */
#define T1_FREQ (TIM_FREQ/84) /* 频率ft值 */
/*
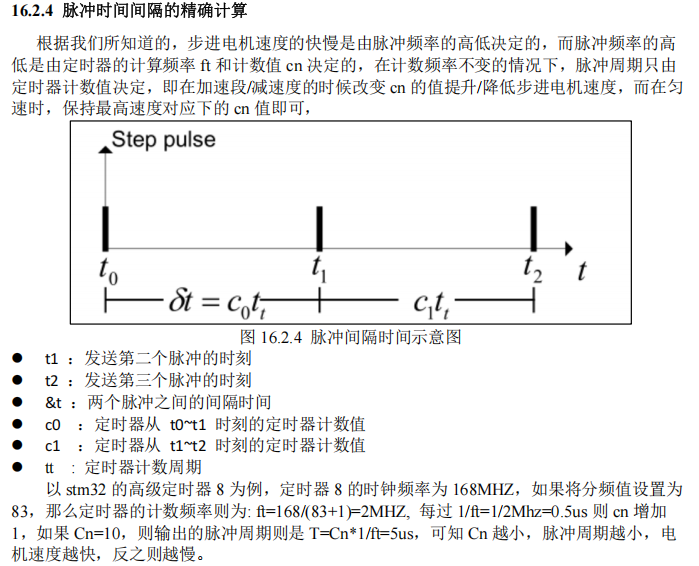
定时器 8 的时钟频率为 168MHZ,如果将分频值设置为83,那么定时器的计数频率则为: ft=168/(83+1)=2MHZ, 每过 1/ft=1/2Mhz=0.5us 则 cn 增加1,如果 Cn=10,则输出的脉冲周期则是 T=Cn*1/ft=5us,可知 Cn 越小,脉冲周期越小,电机速度越快,反之则越慢。
*/
#define SPR (FSPR*MICRO_STEP) /* 旋转一圈需要的脉冲数 */
/* 数学常数 */
#define ALPHA ((float)(2*PAI/SPR)) /* α = 2*pi/spr */
#define A_T_x10 ((float)(10*ALPHA*T1_FREQ))
#define T1_FREQ_148 ((float)((T1_FREQ*0.69)/10)) /* 0.69为误差修正值 */ //泰勒公式的一个特例麦克劳林公式.在化简时舍弃了无穷小余项,当n=1时有0.4485的偏差,我们可以将C0乘一个系数0.676来解决这个误差
#define A_SQ ((float)(2*100000*ALPHA)) /* 放大,避免浮点数运输 */
#define A_x200 ((float)(200*ALPHA)) /* 2*10*10*a/10 */
typedef struct
{
__IO uint8_t run_state; /* 电机旋转状态 */
__IO uint8_t dir; /* 电机旋转方向 */
__IO int32_t step_delay; /* 下个脉冲周期(时间间隔),启动时为加速度 "上一次脉冲周期的Cn-1"*/
__IO uint32_t decel_start; /* 开始减速位置 */
__IO int32_t decel_val; /* 减速阶段步数 */
__IO int32_t min_delay; /* 速度最快,计数值最小的值(最大速度,即匀速段速度) */
__IO int32_t accel_count; /* 加减速阶段计数值 "记录第几个脉冲n"*/
} speedRampData;
enum STA
{
STOP = 0, /* 加减速曲线状态:停止*/
ACCEL, /* 加减速曲线状态:加速阶段*/
DECEL, /* 加减速曲线状态:减速阶段*/
RUN /* 加减速曲线状态:匀速阶段*/
};
enum DIR
{
CCW = 0, /* 逆时针 */
CW /* 顺时针 */
};
enum EN
{
EN_ON = 0, /* 失能脱机引脚 */
EN_OFF /* 使能脱机引脚 使能后电机停止旋转 */
};
/******************************************************************************************/
/* 步进电机引脚定义*/
#define STEPPER_MOTOR_1 1 /* 步进电机接口序号 */
#define STEPPER_MOTOR_2 2
#define STEPPER_MOTOR_3 3
#define STEPPER_MOTOR_4 4
/* 步进电机方向引脚定义 */
#define STEPPER_DIR1_GPIO_PIN GPIO_PIN_14
#define STEPPER_DIR1_GPIO_PORT GPIOF
#define STEPPER_DIR1_GPIO_CLK_ENABLE() do{ __HAL_RCC_GPIOF_CLK_ENABLE(); }while(0) /* PF口时钟使能 */
#define STEPPER_DIR2_GPIO_PIN GPIO_PIN_12
#define STEPPER_DIR2_GPIO_PORT GPIOF
#define STEPPER_DIR2_GPIO_CLK_ENABLE() do{ __HAL_RCC_GPIOF_CLK_ENABLE(); }while(0) /* PF口时钟使能 */
#define STEPPER_DIR3_GPIO_PIN GPIO_PIN_2
#define STEPPER_DIR3_GPIO_PORT GPIOB
#define STEPPER_DIR3_GPIO_CLK_ENABLE() do{ __HAL_RCC_GPIOB_CLK_ENABLE(); }while(0) /* PB口时钟使能 */
#define STEPPER_DIR4_GPIO_PIN GPIO_PIN_2
#define STEPPER_DIR4_GPIO_PORT GPIOH
#define STEPPER_DIR4_GPIO_CLK_ENABLE() do{ __HAL_RCC_GPIOH_CLK_ENABLE(); }while(0) /* PH口时钟使能 */
/* 步进电机脱机引脚定义 */
#define STEPPER_EN1_GPIO_PIN GPIO_PIN_15
#define STEPPER_EN1_GPIO_PORT GPIOF
#define STEPPER_EN1_GPIO_CLK_ENABLE() do{ __HAL_RCC_GPIOF_CLK_ENABLE(); }while(0) /* PF口时钟使能 */
#define STEPPER_EN2_GPIO_PIN GPIO_PIN_13
#define STEPPER_EN2_GPIO_PORT GPIOF
#define STEPPER_EN2_GPIO_CLK_ENABLE() do{ __HAL_RCC_GPIOF_CLK_ENABLE(); }while(0) /* PF口时钟使能 */
#define STEPPER_EN3_GPIO_PIN GPIO_PIN_11
#define STEPPER_EN3_GPIO_PORT GPIOF
#define STEPPER_EN3_GPIO_CLK_ENABLE() do{ __HAL_RCC_GPIOF_CLK_ENABLE(); }while(0) /* PF口时钟使能 */
#define STEPPER_EN4_GPIO_PIN GPIO_PIN_3
#define STEPPER_EN4_GPIO_PORT GPIOH
#define STEPPER_EN4_GPIO_CLK_ENABLE() do{ __HAL_RCC_GPIOH_CLK_ENABLE(); }while(0) /* PH口时钟使能 */
/*----------------------- 方向引脚控制 -----------------------------------*/
/* 由于我们使用的是共阳极解法,并且硬件对电平做了取反操作,所以当 x = 1 有效,x = 0时无效*/
#define ST1_DIR(x) do{ x ? \
HAL_GPIO_WritePin(STEPPER_DIR1_GPIO_PORT, STEPPER_DIR1_GPIO_PIN, GPIO_PIN_SET) : \
HAL_GPIO_WritePin(STEPPER_DIR1_GPIO_PORT, STEPPER_DIR1_GPIO_PIN, GPIO_PIN_RESET); \
}while(0)
#define ST2_DIR(x) do{ x ? \
HAL_GPIO_WritePin(STEPPER_DIR2_GPIO_PORT, STEPPER_DIR2_GPIO_PIN, GPIO_PIN_SET) : \
HAL_GPIO_WritePin(STEPPER_DIR2_GPIO_PORT, STEPPER_DIR2_GPIO_PIN, GPIO_PIN_RESET); \
}while(0)
#define ST3_DIR(x) do{ x ? \
HAL_GPIO_WritePin(STEPPER_DIR3_GPIO_PORT, STEPPER_DIR3_GPIO_PIN, GPIO_PIN_SET) : \
HAL_GPIO_WritePin(STEPPER_DIR3_GPIO_PORT, STEPPER_DIR3_GPIO_PIN, GPIO_PIN_RESET); \
}while(0)
#define ST4_DIR(x) do{ x ? \
HAL_GPIO_WritePin(STEPPER_DIR4_GPIO_PORT, STEPPER_DIR4_GPIO_PIN, GPIO_PIN_SET) : \
HAL_GPIO_WritePin(STEPPER_DIR4_GPIO_PORT, STEPPER_DIR4_GPIO_PIN, GPIO_PIN_RESET); \
}while(0)
/*----------------------- 脱机引脚控制 -----------------------------------*/
/* 由于我们使用的是共阳极解法,并且硬件对电平做了取反操作,所以当 x = 1 有效,x = 0时无效*/
#define ST1_EN(x) do{ x ? \
HAL_GPIO_WritePin(STEPPER_EN1_GPIO_PORT, STEPPER_EN1_GPIO_PIN, GPIO_PIN_SET) : \
HAL_GPIO_WritePin(STEPPER_EN1_GPIO_PORT, STEPPER_EN1_GPIO_PIN, GPIO_PIN_RESET); \
}while(0)
#define ST2_EN(x) do{ x ? \
HAL_GPIO_WritePin(STEPPER_EN2_GPIO_PORT, STEPPER_EN2_GPIO_PIN, GPIO_PIN_SET) : \
HAL_GPIO_WritePin(STEPPER_EN2_GPIO_PORT, STEPPER_EN2_GPIO_PIN, GPIO_PIN_RESET); \
}while(0)
#define ST3_EN(x) do{ x ? \
HAL_GPIO_WritePin(STEPPER_EN3_GPIO_PORT, STEPPER_EN3_GPIO_PIN, GPIO_PIN_SET) : \
HAL_GPIO_WritePin(STEPPER_EN3_GPIO_PORT, STEPPER_EN3_GPIO_PIN, GPIO_PIN_RESET); \
}while(0)
#define ST4_EN(x) do{ x ? \
HAL_GPIO_WritePin(STEPPER_EN4_GPIO_PORT, STEPPER_EN4_GPIO_PIN, GPIO_PIN_SET) : \
HAL_GPIO_WritePin(STEPPER_EN4_GPIO_PORT, STEPPER_EN4_GPIO_PIN, GPIO_PIN_RESET); \
}while(0)
/******************************************************************************************/
/* 外部接口函数*/
void stepper_init(uint16_t arr, uint16_t psc); /* 步进电机接口初始化 */
void stepper_star(uint8_t motor_num); /* 开启步进电机 */
void stepper_stop(uint8_t motor_num); /* 关闭步进电机 */
void create_t_ctrl_param(int32_t step, uint32_t accel, uint32_t decel, uint32_t speed); /* 梯形加减速控制函数 */
#endif
c
/**
****************************************************************************************************
* @file stepper_tim.c
* @author 正点原子团队(ALIENTEK)
* @version V1.0
* @date 2021-10-19
* @brief 定时器 驱动代码
* @license Copyright (c) 2020-2032, 广州市星翼电子科技有限公司
****************************************************************************************************
* @attention
*
* 实验平台:正点原子 STM32F407开发板
* 在线视频:www.yuanzige.com
* 技术论坛:www.openedv.com
* 公司网址:www.alientek.com
* 购买地址:openedv.taobao.com
*
* 修改说明
* V1.0 20211019
* 第一次发布
*
****************************************************************************************************
*/
#include "./BSP/TIMER/stepper_tim.h"
#include "./BSP/LED/led.h"
#include "./BSP/STEPPER_MOTOR/stepper_motor.h"
/* 高级定时器PWM */
TIM_HandleTypeDef g_atimx_handle; /* 定时器x句柄 */
TIM_OC_InitTypeDef g_atimx_oc_chy_handle; /* 定时器输出句柄 */
uint32_t g_count_val = 0; /* 计数值 */
uint32_t g_ccr_val = 500; /* 比较值变值 */
/******************************************************************************************/
/**
* @brief 高级定时器TIMX 输出比较初始化
* @note
* 高级定时器的时钟来自APB2, 而PCLK2 = 168Mhz, 我们设置PPRE2不分频, 因此
* 高级定时器时钟 = 168Mhz
* 定时器溢出时间计算方法: Tout = ((arr + 1) * (psc + 1)) / Ft us.
* Ft=定时器工作频率,单位:Mhz
*
* @param arr: 自动重装值
* @param psc: 时钟预分频数
* @retval 无
*/
void atim_timx_oc_chy_init(uint16_t arr, uint16_t psc)
{
ATIM_TIMX_PWM_CHY_CLK_ENABLE(); /* TIMX 时钟使能 */
g_atimx_handle.Instance = ATIM_TIMX_PWM; /* 定时器x */
g_atimx_handle.Init.Prescaler = psc; /* 定时器分频 */
g_atimx_handle.Init.CounterMode = TIM_COUNTERMODE_UP; /* 向上计数模式 */
g_atimx_handle.Init.Period = arr; /* 自动重装载值 */
g_atimx_handle.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1; /* 分频因子 */
g_atimx_handle.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE; /*使能TIMx_ARR进行缓冲*/
g_atimx_handle.Init.RepetitionCounter = 0; /* 开始时不计数*/
HAL_TIM_OC_Init(&g_atimx_handle); /* 初始化PWM */
g_atimx_oc_chy_handle.OCMode = TIM_OCMODE_TOGGLE; /* 翻转模式 */
g_atimx_oc_chy_handle.Pulse = 0;
g_atimx_oc_chy_handle.OCPolarity = TIM_OCPOLARITY_HIGH; /* 输出比较极性为高 */
g_atimx_oc_chy_handle.OCNPolarity = TIM_OCNPOLARITY_LOW;
g_atimx_oc_chy_handle.OCFastMode = TIM_OCFAST_DISABLE;
g_atimx_oc_chy_handle.OCIdleState = TIM_OCIDLESTATE_RESET;
g_atimx_oc_chy_handle.OCNIdleState = TIM_OCNIDLESTATE_RESET;
HAL_TIM_OC_ConfigChannel(&g_atimx_handle, &g_atimx_oc_chy_handle, ATIM_TIMX_PWM_CH1); /* 配置TIMx通道y */
HAL_TIM_OC_ConfigChannel(&g_atimx_handle, &g_atimx_oc_chy_handle, ATIM_TIMX_PWM_CH2); /* 配置TIMx通道y */
HAL_TIM_OC_ConfigChannel(&g_atimx_handle, &g_atimx_oc_chy_handle, ATIM_TIMX_PWM_CH3); /* 配置TIMx通道y */
HAL_TIM_OC_ConfigChannel(&g_atimx_handle, &g_atimx_oc_chy_handle, ATIM_TIMX_PWM_CH4); /* 配置TIMx通道y */
HAL_TIM_Base_Start(&g_atimx_handle);
}
/**
* @brief 定时器底层驱动,时钟使能,引脚配置
此函数会被HAL_TIM_OC_Init()调用
* @param htim:定时器句柄
* @retval 无
*/
void HAL_TIM_OC_MspInit(TIM_HandleTypeDef *htim)
{
if (htim->Instance == ATIM_TIMX_PWM)
{
GPIO_InitTypeDef gpio_init_struct;
ATIM_TIMX_PWM_CHY_CLK_ENABLE(); /* 开启通道y的GPIO时钟 */
ATIM_TIMX_PWM_CH1_GPIO_CLK_ENABLE(); /* IO时钟使能 */
ATIM_TIMX_PWM_CH2_GPIO_CLK_ENABLE(); /* IO时钟使能 */
ATIM_TIMX_PWM_CH3_GPIO_CLK_ENABLE(); /* IO时钟使能 */
ATIM_TIMX_PWM_CH4_GPIO_CLK_ENABLE(); /* IO时钟使能 */
gpio_init_struct.Pin = ATIM_TIMX_PWM_CH1_GPIO_PIN; /* 通道y的GPIO口 */
gpio_init_struct.Mode = GPIO_MODE_AF_PP; /* 复用推挽输出 */
gpio_init_struct.Pull = GPIO_PULLUP; /* 上拉 */
gpio_init_struct.Speed = GPIO_SPEED_FREQ_HIGH; /* 高速 */
gpio_init_struct.Alternate = ATIM_TIMX_PWM_CHY_GPIO_AF; /* 端口复用 */
HAL_GPIO_Init(ATIM_TIMX_PWM_CH1_GPIO_PORT, &gpio_init_struct);
gpio_init_struct.Pin = ATIM_TIMX_PWM_CH2_GPIO_PIN; /* 通道y的GPIO口 */
HAL_GPIO_Init(ATIM_TIMX_PWM_CH2_GPIO_PORT, &gpio_init_struct);
gpio_init_struct.Pin = ATIM_TIMX_PWM_CH3_GPIO_PIN; /* 通道y的GPIO口 */
HAL_GPIO_Init(ATIM_TIMX_PWM_CH3_GPIO_PORT, &gpio_init_struct);
gpio_init_struct.Pin = ATIM_TIMX_PWM_CH4_GPIO_PIN; /* 通道y的GPIO口 */
HAL_GPIO_Init(ATIM_TIMX_PWM_CH4_GPIO_PORT, &gpio_init_struct);
HAL_NVIC_SetPriority(ATIM_TIMX_INT_IRQn, 2, 2);
HAL_NVIC_EnableIRQ(ATIM_TIMX_INT_IRQn);
}
}
/**
* @brief 高级定时器TIMX NPWM中断服务函数
* @param 无
* @retval 无
*/
void ATIM_TIMX_INT_IRQHandler(void)
{
HAL_TIM_IRQHandler(&g_atimx_handle); /* 定时器共用处理函数 */
}