文章目录
- 思维导图
- 前言
-
- 一、图像梯度核心概念
-
- [1.1 梯度的本质](#1.1 梯度的本质)
- [1.2 梯度的计算逻辑](#1.2 梯度的计算逻辑)
- 二、经典梯度算子与卷积核(重点)
-
- [2.1 基础边缘提取算子(filter2D模式)](#2.1 基础边缘提取算子(filter2D模式))
-
- [2.1.1 垂直边缘提取核(k1)](#2.1.1 垂直边缘提取核(k1))
- [2.1.2 水平边缘提取核(k2)](#2.1.2 水平边缘提取核(k2))
- [2.1.3 filter2D模式参数说明](#2.1.3 filter2D模式参数说明)
- [2.2 Sobel算子(最常用梯度算子)](#2.2 Sobel算子(最常用梯度算子))
-
- [2.2.1 核心原理](#2.2.1 核心原理)
- [2.2.2 Sobel模式参数说明](#2.2.2 Sobel模式参数说明)
- [2.2.3 相关算子对比](#2.2.3 相关算子对比)
- [2.3 Laplacian算子(二阶边缘检测)](#2.3 Laplacian算子(二阶边缘检测))
-
- [2.3.1 数学原理](#2.3.1 数学原理)
- [2.3.2 卷积核形式](#2.3.2 卷积核形式)
- [2.3.3 Laplacian模式参数说明](#2.3.3 Laplacian模式参数说明)
- [三、 代码示例](#三、 代码示例)
- 四、关键总结
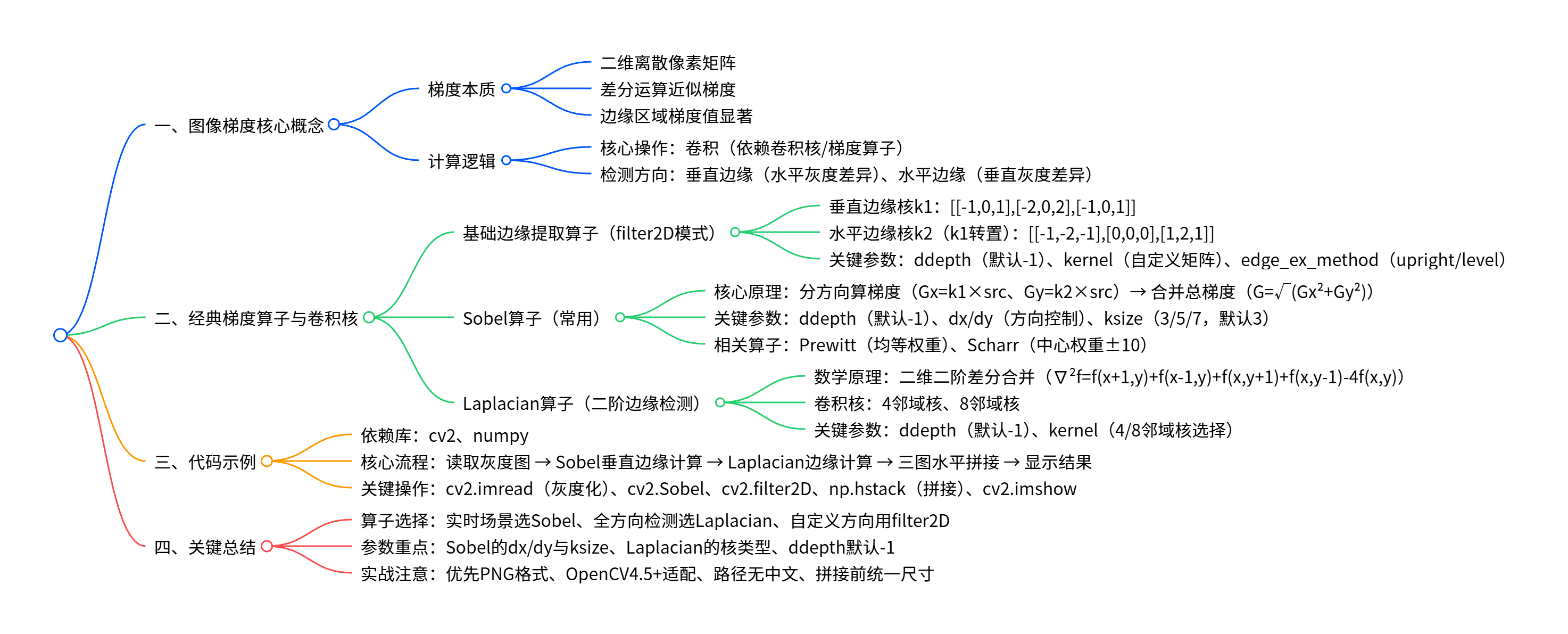
思维导图
前言
在计算机视觉中,图像梯度是提取边缘、分析像素灰度变化的核心工具。本文基于图像梯度处理核心知识,聚焦原理拆解、经典算子、参数配置与实战步骤,剔除冗余内容,直击技术要点
一、图像梯度核心概念
1.1 梯度的本质
图像是二维离散像素矩阵,无法直接计算连续函数的导数,因此用差分运算近似梯度------梯度反映像素灰度值在空间上的变化率,边缘区域因像素值突变,差分结果(梯度)会显著异于平坦区域,这是梯度提取边缘的核心原理。
1.2 梯度的计算逻辑
- 基础操作 :通过卷积实现梯度计算,核心是卷积核(梯度算子)------不同卷积核对应不同方向、不同精度的梯度提取。
- 核心方向 :
- 垂直边缘:检测像素在水平方向(左右)的灰度差异;
- 水平边缘:检测像素在垂直方向(上下)的灰度差异。
二、经典梯度算子与卷积核(重点)
梯度算子的核心是卷积核设计,不同算子通过调整核内权重,实现边缘检测精度、抗噪性的平衡。以下是PDF中重点讲解的4类算子:
2.1 基础边缘提取算子(filter2D模式)
通过自定义卷积核,直接对图像进行卷积运算,提取指定方向边缘,是最基础的梯度处理方式。
2.1.1 垂直边缘提取核(k1)
卷积核形式:
k 1 = − 1 0 1 − 2 0 2 − 1 0 1 k1=\begin{bmatrix} -1 & 0 & 1 \\ -2 & 0 & 2 \\ -1 & 0 & 1\end{bmatrix} k1= −1−2−1000121
- 原理:核内左右列权重相反(左负右正),通过计算"当前列左右两侧像素的加权差分",放大垂直方向的灰度突变(边缘)。
- 示例 :若原图某列像素为
[247, 0, 196],经k1卷积后,差分结果绝对值过大时会被截断(如-290→0,930→255),最终突出垂直边缘。
2.1.2 水平边缘提取核(k2)
将垂直边缘核转置 ,即可得到水平边缘提取核:
k 2 = − 1 − 2 − 1 0 0 0 1 2 1 k2=\begin{bmatrix} -1 & -2 & -1 \\ 0 & 0 & 0 \\ 1 & 2 & 1\end{bmatrix} k2= −101−202−101
- 原理:核内上下行权重相反(上负下正),计算"当前行上下两侧像素的加权差分",提取水平边缘。
2.1.3 filter2D模式参数说明
在梯度处理组件中,选择filter_method=filter2D时,关键参数含义:
| 参数名 | 含义 |
|---|---|
ddepth |
目标图像的深度,设为-1时表示与输入图像深度一致(常用默认值) |
kernel |
自定义卷积核,需输入单通道浮点矩阵(如上述k1、k2) |
edge_ex_method |
边缘检测方向:upright(垂直)、level(水平) |
2.2 Sobel算子(最常用梯度算子)
Sobel算子是基础边缘提取算子的优化版,通过"分方向计算梯度+合并总梯度",提升边缘检测的鲁棒性,是工业场景中的首选。
2.2.1 核心原理
- 分方向计算梯度 :
- 水平梯度(Gx):用垂直边缘核k1与原图卷积,捕捉垂直边缘,公式: G x = k 1 × s r c G_x = k1 × src Gx=k1×src;
- 垂直梯度(Gy):用水平边缘核k2与原图卷积,捕捉水平边缘,公式: G y = k 2 × s r c G_y = k2 × src Gy=k2×src;
- 计算总梯度 :合并两个方向的梯度,得到边缘的综合强度,公式: G = G x 2 + G y 2 G=\sqrt{G_x^2 + G_y^2} G=Gx2+Gy2 (实际为简化计算,也可用 ∣ G x ∣ + ∣ G y ∣ |G_x| + |G_y| ∣Gx∣+∣Gy∣近似)。
2.2.2 Sobel模式参数说明
选择filter_method=Sobel时,关键参数需重点配置:
| 参数名 | 含义 |
|---|---|
ddepth |
目标图像深度,默认-1 |
dx/dy |
梯度方向控制: - dx=1, dy=0:计算x方向(水平)一阶导数(垂直边缘); - dx=0, dy=1:计算y方向(垂直)一阶导数(水平边缘); - 禁止同时设为1(结果无意义) |
ksize |
Sobel算子大小,可选3、5、7,默认3(3×3核兼顾速度与精度) |
2.2.3 相关算子对比
PDF中提及Sobel的两类替代算子,可根据场景选择:
- Prewitt算子 :权重均等,抗噪性略弱于Sobel,核形式:
k = − 1 0 1 − 1 0 1 − 1 0 1 k=\begin{bmatrix} -1 & 0 & 1 \\ -1 & 0 & 1 \\ -1 & 0 & 1\end{bmatrix} k= −1−1−1000111 - Scharr算子 :权重更大(中心列权重±10),边缘检测更灵敏,核形式:
k = − 3 0 3 − 10 0 10 − 3 0 3 k=\begin{bmatrix} -3 & 0 & 3 \\ -10 & 0 & 10 \\ -3 & 0 & 3\end{bmatrix} k= −3−10−30003103
2.3 Laplacian算子(二阶边缘检测)
与Sobel(一阶导数)不同,Laplacian算子基于二阶导数------数学中"一阶导数极值处,二阶导数为0",因此通过二阶差分可直接定位边缘,且对所有方向边缘(水平、垂直、斜向)均敏感。
2.3.1 数学原理
- 二维二阶差分公式 :
对像素 f ( x , y ) f(x,y) f(x,y),x和y方向的二阶差分分别为:
∂ 2 f ∂ x 2 = f ( x + 1 , y ) + f ( x − 1 , y ) − 2 f ( x , y ) \frac{\partial^2 f}{\partial x^2}=f(x+1,y)+f(x-1,y)-2f(x,y) ∂x2∂2f=f(x+1,y)+f(x−1,y)−2f(x,y)
∂ 2 f ∂ y 2 = f ( x , y + 1 ) + f ( x , y − 1 ) − 2 f ( x , y ) \frac{\partial^2 f}{\partial y^2}=f(x,y+1)+f(x,y-1)-2f(x,y) ∂y2∂2f=f(x,y+1)+f(x,y−1)−2f(x,y) - 合并二阶差分 :
总二阶差分(Laplacian值)为两个方向之和:
∇ 2 f ( x , y ) = f ( x + 1 , y ) + f ( x − 1 , y ) + f ( x , y + 1 ) + f ( x , y − 1 ) − 4 f ( x , y ) \nabla^2 f(x,y)=f(x+1,y)+f(x-1,y)+f(x,y+1)+f(x,y-1)-4f(x,y) ∇2f(x,y)=f(x+1,y)+f(x−1,y)+f(x,y+1)+f(x,y−1)−4f(x,y)
2.3.2 卷积核形式
从二阶差分公式中提取权重,得到Laplacian的两类核心:
- 基础核(4邻域) :仅考虑上下左右像素,核形式:
k = 0 1 0 1 − 4 1 0 1 0 k=\begin{bmatrix} 0 & 1 & 0 \\ 1 & -4 & 1 \\ 0 & 1 & 0\end{bmatrix} k= 0101−41010 - 扩展核(8邻域) :包含斜对角像素,边缘检测更全面,核形式:
k = 1 1 1 1 − 8 1 1 1 1 k=\begin{bmatrix} 1 & 1 & 1 \\ 1 & -8 & 1 \\ 1 & 1 & 1\end{bmatrix} k= 1111−81111
2.3.3 Laplacian模式参数说明
选择filter_method=Laplacian时,参数较简单:
ddepth:目标图像深度,默认-1;kernel:直接使用上述4邻域或8邻域核(无需额外配置方向参数,因对所有方向边缘敏感)。
三、 代码示例
核心代码示例
python
import cv2
import numpy as np
if __name__ == "__main__":
# 读取输入图片
path = "shudu.png"
image_np = cv2.imread(path, cv2.IMREAD_GRAYSCALE)
# 1. Sobel算子(垂直边缘)
sobel_x = cv2.Sobel(image_np, ddepth=-1, dx=1, dy=0, ksize=3)
# 2. Laplacian算子(4邻域核)
laplacian_kernel = np.array([[0, 1, 0], [1, -4, 1], [0, 1, 0]], dtype=np.float32)
laplacian_result = cv2.filter2D(image_np, ddepth=-1, kernel=laplacian_kernel)
# 将三张图水平拼接(需确保尺寸一致)
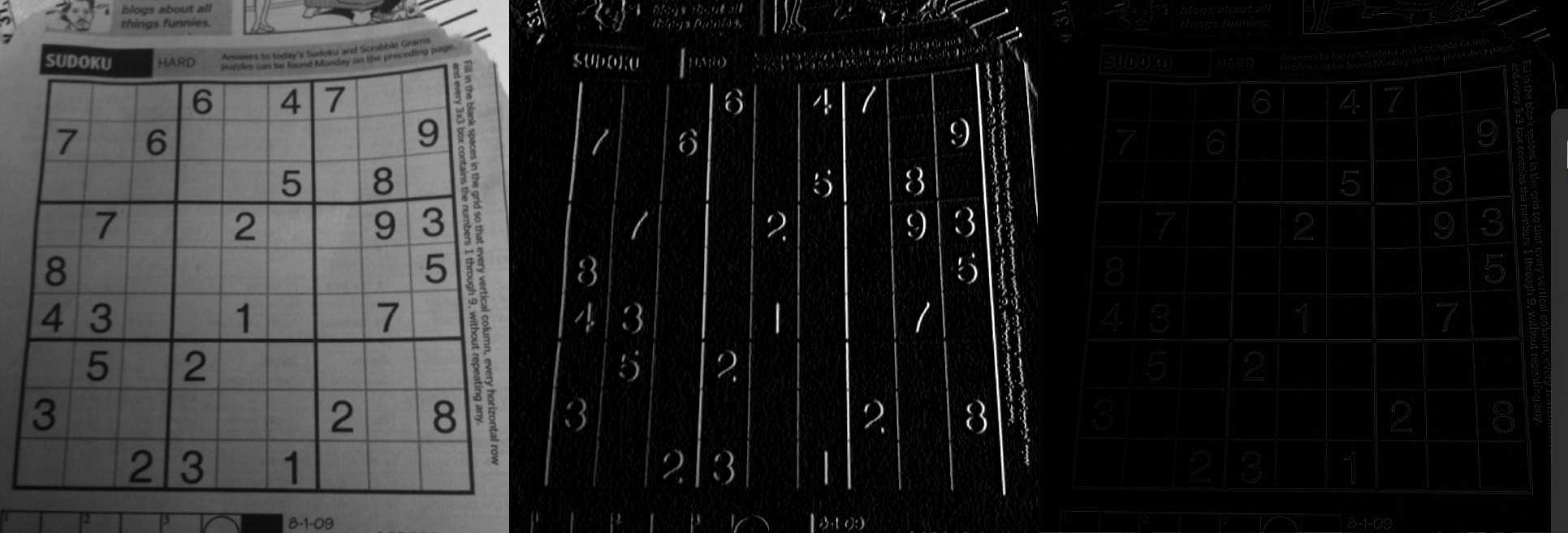
combined = np.hstack((image_np, sobel_x, laplacian_result))
# 显示合并后的图
cv2.imshow("Original + Sobel X + Laplacian", combined)
cv2.waitKey(0)
cv2.destroyAllWindows()输出结果维
四、关键总结
- 算子选择原则 :
- 快速验证/实时场景:选Sobel(3×3核),平衡速度与精度;
- 全方向边缘检测:选Laplacian(8邻域核),适合复杂纹理;
- 自定义边缘方向:用filter2D+自定义核,灵活度最高。
- 参数配置重点 :
- Sobel的
dx/dy决定边缘方向,ksize越大抗噪性越强; - Laplacian的核选择(4/8邻域)决定边缘覆盖范围;
ddepth默认设-1,避免图像深度不匹配导致的错误。
- Sobel的
- 实战注意 :
- 图片格式:优先用原生PNG,避免后缀修改;
- 代码运行:确保OpenCV版本适配