1.GPIO简介
STM32 芯片的 GPIO 引脚与外部设备连接起来,从而实现与外部通讯、控制以及数据采集的功能。 STM32 芯片的 GPIO 被分成很多组,每组有 16 个引脚,如型号为 STM32F103VET6 型号的
芯片有 GPIOA、GPIOB、GPIOC 至 GPIOE 共 5 组 GPIO,芯片一共 100 个引脚,其中
GPIO 就占了一大部分,所有的 GPIO 引脚都有基本的输入输出功能。
最基本的输出功能是由 STM32 控制引脚输出高、低电平,实现开关控制,如把 GPIO
引脚接入到 LED 灯,那就可以控制 LED 灯的亮灭,引脚接入到继电器或三极管,那就可
以通过继电器或三极管控制外部大功率电路的通断。
2.GPIO框图
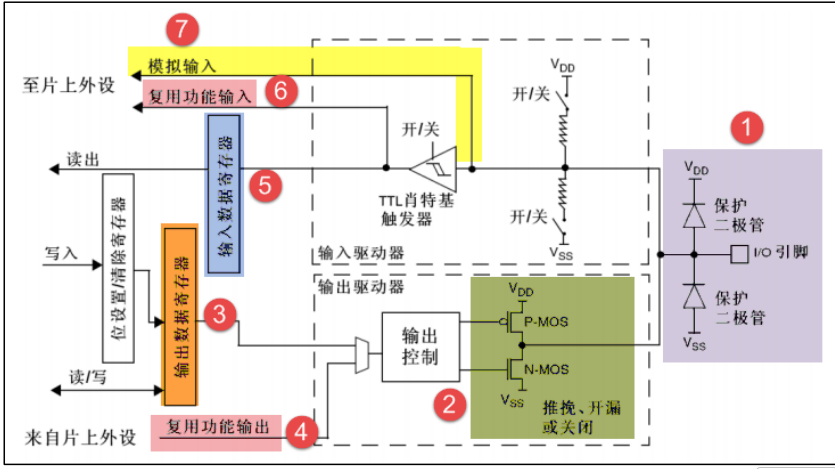
- 保护二极管及上、下拉电阻
引脚的两个保护二级管可以防止引脚外部过高或过低的电压输入,当引脚电压高于
VDD 时,上方的二极管导通,当引脚电压低于 VSS 时,下方的二极管导通,防止不正常电
压引入芯片导致芯片烧毁。尽管有这样的保护,并不意味着 STM32 的引脚能直接外接大功
率驱动器件,如直接驱动电机,强制驱动要么电机不转,要么导致芯片烧坏,必须要加大
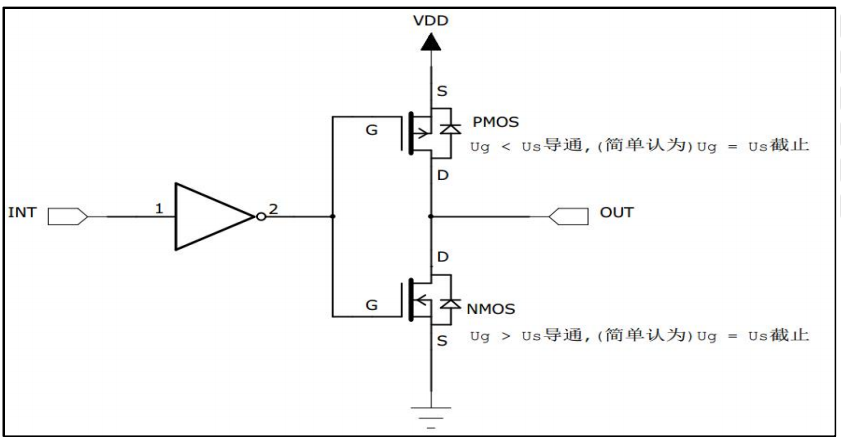
功率及隔离电路驱动。 - P-MOS 管和 N-MOS 管
GPIO 引脚线路经过两个保护二极管后,向上流向"输入模式"结构,向下流向"输出
模式"结构。先看输出模式部分,线路经过一个由 P-MOS 和 N-MOS 管组成的单元电路。
这个结构使 GPIO 具有了"推挽输出"和"开漏输出"两种模式。
所谓的推挽输出模式,是根据这两个 MOS 管的工作方式来命名的。在该结构中输入
高电平时,经过反向后,上方的 P-MOS 导通,下方的 N-MOS 关闭,对外输出高电平;而
在该结构中输入低电平时,经过反向后,N-MOS 管导通,P-MOS 关闭,对外输出低电平。
当引脚高低电平切换时,两个管子轮流导通,P 管负责灌电流,N 管负责拉电流,使其负
载能力和开关速度都比普通的方式有很大的提高。推挽输出的低电平为 0 伏,高电平为 3.3
伏,具体参考图 8-2,它是推挽输出模式时的等效电路。
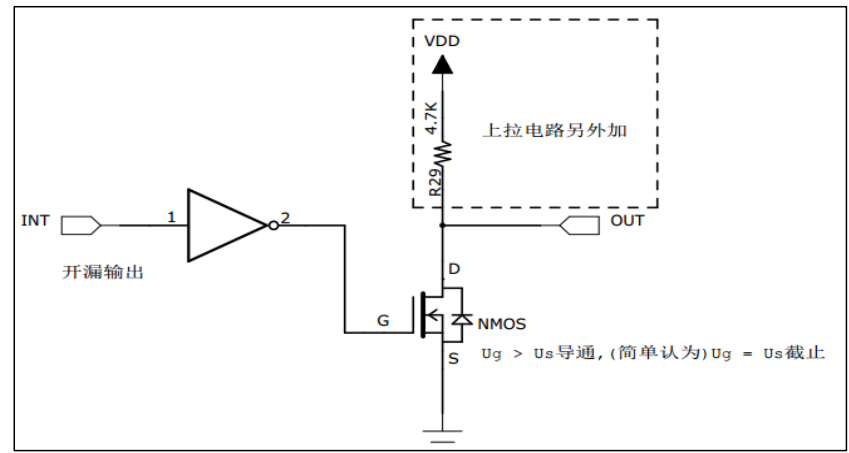
而在开漏输出模式时,上方的 P-MOS 管完全不工作。如果我们控制输出为 0,低电平,
则 P-MOS 管关闭,N-MOS 管导通,使输出接地,若控制输出为 1 (它无法直接输出高电平)
时,则 P-MOS 管和 N-MOS 管都关闭,所以引脚既不输出高电平,也不输出低电平,为高
阻态。为正常使用时必须外部接上拉电阻,参考图 8-3 中等效电路。它具有"线与"特性,
也就是说,若有很多个开漏模式引脚连接到一起时,只有当所有引脚都输出高阻态,才由
上拉电阻提供高电平,此高电平的电压为外部上拉电阻所接的电源的电压。若其中一个引
脚为低电平,那线路就相当于短路接地,使得整条线路都为低电平,0 伏。
推挽输出模式一般应用在输出电平为 0 和 3.3 伏而且需要高速切换开关状态的场合。
在 STM32 的应用中,除了必须用开漏模式的场合,我们都习惯使用推挽输出模式。
开漏输出一般应用在 I2C、SMBUS 通讯等需要"线与"功能的总线电路中。除此之外,
还用在电平不匹配的场合,如需要输出 5 伏的高电平,就可以在外部接一个上拉电阻,上
拉电源为 5 伏,并且把 GPIO 设置为开漏模式,当输出高阻态时,由上拉电阻和电源向外
输出 5 伏的电平,具体见图 8-4。
cpp
// 只能输出低电平或高阻态
// 需要外接上拉电阻才能输出高电平
// 适合I2C、电平转换等应用
GPIOB->CRL |= (0x7 << 4); // 开漏输出- 输出数据寄存器
前面提到的双 MOS 管结构电路的输入信号,是由 GPIO" 输 出 数 据 寄 存 器
GPIOx_ODR"提供的,因此我们通过修改输出数据寄存器的值就可以修改 GPIO 引脚的输
出电平。而"置位/复位寄存器 GPIOx_BSRR"可以通过修改输出数据寄存器的值从而影响
电路的输出。 - 复用功能输出
"复用功能输出"中的"复用"是指 STM32 的其它片上外设对 GPIO 引脚进行控制,
此时 GPIO 引脚用作该外设功能的一部分,算是第二用途。从其它外设引出来的"复用功
能输出信号"与 GPIO 本身的数据据寄存器都连接到双 MOS 管结构的输入中,通过图中的
梯形结构作为开关切换选择。
例如我们使用 USART 串口通讯时,需要用到某个 GPIO 引脚作为通讯发送引脚,这个
时候就可以把该 GPIO 引脚配置成 USART 串口复用功能,由串口外设控制该引脚,发送数
据。 - 输入数据寄存器
看 GPIO 结构框图的上半部分,GPIO 引脚经过内部的上、下拉电阻,可以配置成上/
下拉输入,然后再连接到施密特触发器,信号经过触发器后,模拟信号转化为 0、1 的数字
信号,然后存储在"输入数据寄存器 GPIOx_IDR"中,通过读取该寄存器就可以了解 GPIO 引脚的电平状态。 - 复用功能输入
与"复用功能输出"模式类似,在"复用功能输入模式"时,GPIO 引脚的信号传输到
STM32 其它片上外设,由该外设读取引脚状态。
同样,如我们使用 USART 串口通讯时,需要用到某个 GPIO 引脚作为通讯接收引脚,
这个时候就可以把该 GPIO 引脚配置成 USART 串口复用功能,使 USART 可以通过该通讯
引脚的接收远端数据。 - 模拟输入输出
当 GPIO 引脚用于 ADC 采集电压的输入通道时,用作"模拟输入"功能,此时信号是
不经过施密特触发器的,因为经过施密特触发器后信号只有 0、1 两种状态,所以 ADC 外
设要采集到原始的模拟信号,信号源输入必须在施密特触发器之前。类似地,当 GPIO 引
脚用于 DAC 作为模拟电压输出通道时,此时作为"模拟输出"功能,DAC 的模拟信号输
出就不经过双 MOS 管结构,模拟信号直接输出到引脚。
3.输入输出控制
4.项目工程
1. startup_stm32f10x_hd.s - 启动文件
作用:系统启动和初始化
这是汇编语言编写的启动文件 ,是芯片上电后执行的第一个代码。
主要功能:
1.1 初始化堆栈指针
cpp
; 定义主堆栈大小
Stack_Size EQU 0x00000400
AREA STACK, NOINIT, READWRITE, ALIGN=3
Stack_Mem SPACE Stack_Size
__initial_sp
; 定义堆大小
Heap_Size EQU 0x00000200
AREA HEAP, NOINIT, READWRITE, ALIGN=3
__heap_base
Heap_Mem SPACE Heap_Size
__heap_limit1.2 设置中断向量表
cpp
g_pfnVectors
DCD __initial_sp ; 栈顶地址
DCD Reset_Handler ; 复位中断
DCD NMI_Handler ; NMI中断
DCD HardFault_Handler ; 硬件错误中断
DCD MemManage_Handler ; 内存管理错误
DCD BusFault_Handler ; 总线错误
DCD UsageFault_Handler ; 用法错误
DCD 0 ; 保留
; ... 更多中断向量1.3 复位处理程序
cpp
Reset_Handler PROC
EXPORT Reset_Handler [WEAK]
IMPORT __main
IMPORT SystemInit
LDR R0, =SystemInit
BLX R0 ; 调用系统初始化
LDR R0, =__main
BX R0 ; 跳转到main函数
ENDP1.4 默认中断服务程序
cpp
NMI_Handler PROC
EXPORT NMI_Handler [WEAK]
B .
ENDP
HardFault_Handler PROC
EXPORT HardFault_Handler [WEAK]
B .
ENDP2. stm32f10x.h - 寄存器定义头文件
作用:提供硬件寄存器定义和访问接口
这是C语言头文件,包含了STM32F10x系列的所有外设寄存器定义。
主要功能:
2.1 外设寄存器结构体定义
cpp
/* GPIO 寄存器结构体 */
typedef struct
{
__IO uint32_t CRL;
__IO uint32_t CRH;
__IO uint32_t IDR;
__IO uint32_t ODR;
__IO uint32_t BSRR;
__IO uint32_t BRR;
__IO uint32_t LCKR;
} GPIO_TypeDef;
/* 外设基地址定义 */
#define PERIPH_BASE ((uint32_t)0x40000000)
#define APB2PERIPH_BASE (PERIPH_BASE + 0x10000)
#define GPIOA_BASE (APB2PERIPH_BASE + 0x0800)
/* 外设指针定义 */
#define GPIOA ((GPIO_TypeDef *) GPIOA_BASE)
#define GPIOB ((GPIO_TypeDef *) GPIOB_BASE)
#define GPIOC ((GPIO_TypeDef *) GPIOC_BASE)2.2 寄存器位定义
cpp
/* GPIO 配置寄存器位定义 */
#define GPIO_CRL_CNF0 ((uint32_t)0x0000000C)
#define GPIO_CRL_CNF0_0 ((uint32_t)0x00000004)
#define GPIO_CRL_CNF0_1 ((uint32_t)0x00000008)
#define GPIO_CRL_MODE0 ((uint32_t)0x00000003)
#define GPIO_CRL_MODE0_0 ((uint32_t)0x00000001)
#define GPIO_CRL_MODE0_1 ((uint32_t)0x00000002)2.3 外设时钟使能定义
cpp
/* RCC 时钟使能寄存器 */
#define RCC_APB2ENR_IOPAEN ((uint32_t)0x00000004)
#define RCC_APB2ENR_IOPBEN ((uint32_t)0x00000008)
#define RCC_APB2ENR_IOPCEN ((uint32_t)0x00000010)3. 两个文件的协同工作流程
系统启动顺序:
1. 上电复位
2. 执行 startup_stm32f10x_hd.s
├── 设置堆栈指针
├── 初始化中断向量表
├── 调用 SystemInit() 函数
└── 跳转到 main() 函数
3. 在 main() 中通过 stm32f10x.h 访问硬件
├── 使能外设时钟
├── 配置 GPIO 等外设
└── 实现应用程序逻辑SystemInit() 的主要功能
1. 配置系统时钟
这是最重要的功能!STM32上电后默认使用内部8MHz RC振荡器,SystemInit() 将其切换到外部时钟并提高频率。
c
SystemInit() 的主要功能
1. 配置系统时钟
这是最重要的功能!STM32上电后默认使用内部8MHz RC振荡器,SystemInit() 将其切换到外部时钟并提高频率。
cpp
void SystemInit(void)
{
/* 1. 复位RCC时钟配置 */
RCC->CR |= (uint32_t)0x00000001; // 开启HSI
RCC->CFGR = 0x00000000; // 复位时钟配置
RCC->CR &= (uint32_t)0xFEF6FFFF; // 关闭HSE、CSS、PLL
RCC->CR &= (uint32_t)0xFFFBFFFF; // 复位HSEBYP
RCC->CFGR &= (uint32_t)0xFF80FFFF; // 复位PLL倍频等
/* 2. 配置外部晶振和PLL */
#ifdef STM32F10X_HD
// 对于大容量产品,配置为72MHz
RCC->CR |= ((uint32_t)RCC_CR_HSEON); // 开启HSE
// 等待HSE稳定
while((RCC->CR & RCC_CR_HSERDY) == 0);
// 配置PLL:8MHz * 9 = 72MHz
RCC->CFGR |= (uint32_t)(RCC_CFGR_PLLSRC_HSE |
RCC_CFGR_PLLMULL9);
RCC->CR |= RCC_CR_PLLON; // 开启PLL
while((RCC->CR & RCC_CR_PLLRDY) == 0); // 等待PLL稳定
/* 3. 配置Flash等待状态(重要!)*/
FLASH->ACR |= FLASH_ACR_LATENCY_2; // 2个等待状态,用于72MHz
/* 4. 切换系统时钟到PLL */
RCC->CFGR |= (uint32_t)RCC_CFGR_SW_PLL;
while((RCC->CFGR & (uint32_t)RCC_CFGR_SWS) != (uint32_t)0x08);
#endif
}2. 配置Flash存储器
高速运行时需要配置Flash等待周期:
cpp
// 不同频率对应的等待状态
// 0-24MHz: 0等待状态
// 24-48MHz: 1等待状态
// 48-72MHz: 2等待状态
FLASH->ACR = FLASH_ACR_LATENCY_2 | FLASH_ACR_PRFTBE;3. 配置向量表位置
cpp
#ifdef VECT_TAB_SRAM
// 如果向量表在SRAM中
SCB->VTOR = SRAM_BASE | VECT_TAB_OFFSET;
#else
// 默认向量表在Flash中
SCB->VTOR = FLASH_BASE | VECT_TAB_OFFSET;
#endif5.开启外设时钟
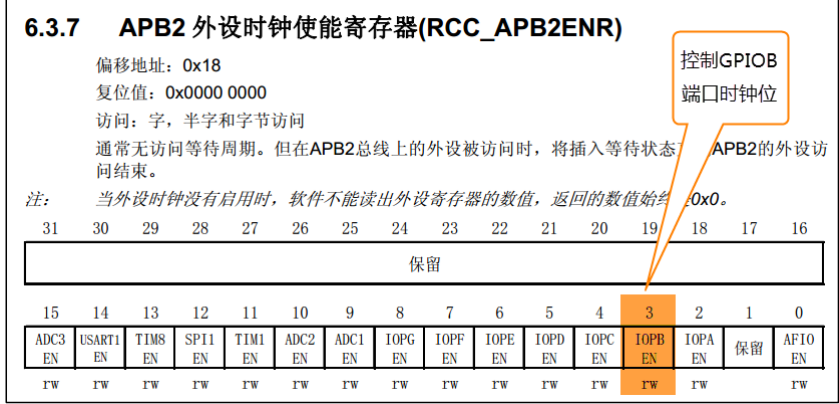
1. 时钟使能如何影响电源开关
实际的硬件电路:
在芯片内部,每个外设都有时钟门控电路:
时钟信号 ───┬─── 与门 ─── 外设电路
│
时钟使能位 ──┘具体实现:
// 硬件层面的简化表示
if (SPI1_CLK_ENABLE == 1) {
SPI1_Clock = APB2_Clock; // 时钟信号到达SPI1电路
SPI1_Power = ON; // SPI1电路通电
} else {
SPI1_Clock = 0; // 无时钟信号
SPI1_Power = OFF; // SPI1电路断电
}功耗影响:
时钟使能关闭时:
-
外设内部的所有触发器、计数器、状态机都停止工作
-
大部分电路进入零动态功耗状态
-
只有极小的静态泄漏电流
实测数据:
// 关闭所有不用的外设时钟,可节省:
GPIOx时钟关闭:节省 ~50μA 每个端口
SPI1时钟关闭:节省 ~150μA
USART1时钟关闭:节省 ~200μA
ADC1时钟关闭:节省 ~300μA
// 对于电池应用,这很重要!2. 时钟使能如何影响访问权限
硬件保护机制:
STM32有一个总线矩阵和访问保护硬件:
CPU ─── 总线矩阵 ───┬─── GPIOA (时钟使能控制访问)
├─── GPIOB (时钟使能控制访问)
├─── SPI1 (时钟使能控制访问)
└─── USART1 (时钟使能控制访问)访问保护的硬件实现:
// 简化的硬件逻辑
if (Peripheral_CLK_Enabled) {
// 允许寄存器访问
Peripheral_Register = CPU_Write_Data;
} else {
// 触发总线错误!生成HardFault
Generate_HardFault();
}实际错误示例:
// 错误代码:在时钟关闭时访问SPI1寄存器
RCC->APB2ENR &= ~RCC_APB2ENR_SPI1EN; // 关闭SPI1时钟
SPI1->CR1 = 0x0000; // 这里会触发HardFault中断!
// 因为SPI1寄存器在物理上不可访问