Open3D 非常适合 3D 测高项目 (如物体高度测量、地形高程分析、点云垂直距离计算等),核心思路是:通过点云数据获取目标物体 / 场景的 3D 坐标,结合「基准面(如地面)」或「参考点」计算垂直距离(高度)。以下是完整的实现方案,涵盖 单物体测高、多物体批量测高、地形高程分析 三大场景,兼容 Open3D 全版本。
一、核心原理
3D 测高中的 "高度" 本质是 目标点与基准面(或参考点)在垂直方向上的距离,常见两种计算方式:
- 基准面法(推荐):先拟合 / 生成地面(基准面),计算每个目标点到基准面的垂直距离(即高度);
- 参考点法:以某个已知高度的点(如地面上的参考点)为基准,计算目标点与参考点的 Z 轴(或自定义垂直轴)差值。
本文重点讲解 基准面法(更通用,适配复杂场景),步骤如下:
- 加载 / 预处理点云(去噪、下采样,提升计算效率);
- 生成 / 拟合基准面(地面),确保覆盖目标区域;
- 提取目标物体的点云(或关键顶点);
- 计算目标点到基准面的垂直距离,得到高度。
二、完整实现代码(三大场景)
依赖准备
python
pip install open3d numpy scipy # scipy 用于点云分割(可选)代码总览(含工具函数 + 场景测试)
python
import open3d as o3d
import numpy as np
from scipy.spatial import cKDTree # 用于最近点查询(可选)
# ---------------------- 基础工具函数(复用之前的兼容版平面生成+新增测高工具)----------------------
def create_plane_compatible(
width: float = 1.0,
height: float = 1.0,
resolution: tuple[int, int] = (1, 1),
center: tuple[float, float, float] = (0.0, 0.0, 0.0),
direction: tuple[float, float, float] = (0.0, 0.0, 1.0)
) -> o3d.geometry.TriangleMesh:
"""兼容低版本的平面生成函数(基准面用)"""
x_res, y_res = resolution
if x_res < 1 or y_res < 1:
raise ValueError("分辨率必须为正整数")
if width <= 0 or height <= 0:
raise ValueError("宽度/高度必须为正数")
# 生成本地 XY 平面顶点
x = np.linspace(-width/2, width/2, x_res + 1)
y = np.linspace(-height/2, height/2, y_res + 1)
xx, yy = np.meshgrid(x, y)
zz = np.zeros_like(xx)
vertices_local = np.column_stack([xx.ravel(), yy.ravel(), zz.ravel()])
# 生成三角形索引
triangles = []
for i in range(y_res):
for j in range(x_res):
v0 = i * (x_res + 1) + j
v1 = v0 + 1
v2 = (i + 1) * (x_res + 1) + j
v3 = v2 + 1
triangles.append([v0, v1, v3])
triangles.append([v0, v3, v2])
triangles = np.array(triangles, dtype=np.int32)
# 旋转平面以匹配法向量
dir_norm = np.array(direction)
dir_norm = dir_norm / np.linalg.norm(dir_norm) if np.linalg.norm(dir_norm) != 0 else np.array([0,0,1])
default_normal = np.array([0, 0, 1])
if not np.allclose(dir_norm, default_normal):
axis = np.cross(default_normal, dir_norm)
axis = axis / np.linalg.norm(axis) if np.linalg.norm(axis) != 0 else np.array([1,0,0])
angle = np.arccos(np.clip(np.dot(default_normal, dir_norm), -1.0, 1.0))
rotation_mat = o3d.geometry.get_rotation_matrix_from_axis_angle(axis * angle)
vertices_local = (rotation_mat @ vertices_local.T).T
# 平移到目标中心
vertices_local += np.array(center)
# 创建网格并计算法向量
mesh = o3d.geometry.TriangleMesh()
mesh.vertices = o3d.utility.Vector3dVector(vertices_local)
mesh.triangles = o3d.utility.Vector3iVector(triangles)
mesh.compute_vertex_normals()
mesh.compute_triangle_normals()
return mesh
def point_to_plane_distance(points: np.ndarray, plane_params: tuple[float, float, float, float]) -> np.ndarray:
"""
计算点到平面的垂直距离(高度核心函数)
参数:
points: (N, 3) 点云坐标数组
plane_params: 平面方程参数 (A, B, C, D),满足 Ax + By + Cz + D = 0
返回:
distances: (N,) 每个点到平面的垂直距离(正值表示在平面法向量一侧,负值相反)
"""
A, B, C, D = plane_params
numerator = np.abs(A * points[:, 0] + B * points[:, 1] + C * points[:, 2] + D)
denominator = np.sqrt(A**2 + B**2 + C**2)
return numerator / denominator # 距离非负(高度为绝对值)
def fit_ground_plane(points: np.ndarray, z_threshold: float = 0.1) -> tuple[tuple[float, float, float, float], np.ndarray]:
"""
从点云中拟合地面基准面(RANSAC 算法,抗噪性强)
参数:
points: (N, 3) 点云坐标数组
z_threshold: 地面点的高度阈值(用于筛选地面候选点)
返回:
plane_params: 平面方程 (A, B, C, D)
ground_points: 筛选出的地面点云坐标
"""
# 1. 筛选 Z 轴较低的候选地面点(减少非地面点干扰)
z_min = np.min(points[:, 2])
ground_candidates = points[points[:, 2] < z_min + z_threshold]
if len(ground_candidates) < 3:
raise ValueError("地面候选点不足,无法拟合平面!")
# 2. 使用 RANSAC 拟合平面(Open3D 内置,抗噪性强)
pcd_candidates = o3d.geometry.PointCloud(o3d.utility.Vector3dVector(ground_candidates))
plane_model, inliers = pcd_candidates.segment_plane(
distance_threshold=0.05, # 内点距离阈值(可调整)
ransac_n=3, # 拟合平面所需最少点数
num_iterations=1000 # 迭代次数
)
A, B, C, D = plane_model
ground_points = ground_candidates[inliers] # 最终筛选的地面点
return (A, B, C, D), ground_points
# ---------------------- 场景1:单物体测高(已知目标点云/包围盒)----------------------
def measure_single_object_height(
point_cloud: o3d.geometry.PointCloud,
use_fitted_plane: bool = True # True=拟合地面,False=使用包围盒底部作为基准
) -> tuple[float, o3d.geometry.TriangleMesh, tuple[float, float, float, float] | None]:
"""
测量单个物体的高度(点云整体高度)
参数:
point_cloud: 目标物体的点云(需单独提取,不含地面)
use_fitted_plane: 是否拟合地面作为基准(推荐True,更准确)
返回:
height: 物体高度(单位:与点云坐标一致)
base_plane: 基准面网格(可视化用)
plane_params: 平面方程参数(use_fitted_plane=True时返回)
"""
points = np.asarray(point_cloud.points)
if len(points) == 0:
raise ValueError("目标物体点云为空!")
# 1. 确定基准面
if use_fitted_plane:
# 拟合地面基准面(假设输入点云包含地面,或单独传入地面点云)
plane_params, ground_points = fit_ground_plane(points)
# 生成基准面网格(覆盖地面点云范围)
ground_aabb = o3d.geometry.AxisAlignedBoundingBox().create_from_points(o3d.utility.Vector3dVector(ground_points))
ground_center = ground_aabb.get_center()
ground_width = ground_aabb.max_bound[0] - ground_aabb.min_bound[0]
ground_height = ground_aabb.max_bound[1] - ground_aabb.min_bound[1]
base_plane = create_plane_compatible(
width=ground_width * 1.2, # 扩大20%确保覆盖
height=ground_height * 1.2,
center=ground_center,
direction=(plane_params[0], plane_params[1], plane_params[2]) # 平面法向量
)
else:
# 简化方案:用物体包围盒底部作为基准(适合无地面点云场景)
aabb = point_cloud.get_axis_aligned_bounding_box()
base_z = aabb.min_bound[2]
plane_params = None
# 生成基准面(覆盖物体包围盒)
base_plane = create_plane_compatible(
width=aabb.max_bound[0] - aabb.min_bound[0],
height=aabb.max_bound[1] - aabb.min_bound[1],
center=aabb.get_center(),
direction=(0, 0, 1)
)
# 平移基准面到包围盒底部
base_plane.translate([0, 0, base_z - aabb.get_center()[2]])
# 2. 计算物体高度(最高点到基准面的距离)
if use_fitted_plane:
distances = point_to_plane_distance(points, plane_params)
max_distance = np.max(distances) # 最高点高度
height = max_distance
else:
# 包围盒高度(Z轴最大-最小)
aabb = point_cloud.get_axis_aligned_bounding_box()
height = aabb.max_bound[2] - aabb.min_bound[2]
return height, base_plane, plane_params
# ---------------------- 场景2:多物体批量测高(点云分割后)----------------------
def measure_multi_objects_height(
full_point_cloud: o3d.geometry.PointCloud,
cluster_threshold: float = 0.1, # 聚类距离阈值(控制物体分割)
min_points_per_object: int = 50 # 最小物体点数(过滤噪声)
) -> tuple[list[float], list[o3d.geometry.PointCloud], o3d.geometry.TriangleMesh]:
"""
批量测量点云中多个物体的高度(自动分割物体)
参数:
full_point_cloud: 包含地面+多个物体的完整点云
cluster_threshold: DBSCAN 聚类距离阈值
min_points_per_object: 每个物体的最小点数
返回:
heights: 每个物体的高度列表
object_pcds: 每个物体的点云列表
ground_plane: 地面基准面网格
"""
# 1. 预处理:下采样(减少计算量)+ 去噪
pcd_down = full_point_cloud.voxel_down_sample(voxel_size=0.02)
cl, ind = pcd_down.remove_statistical_outlier(nb_neighbors=20, std_ratio=2.0)
pcd_clean = pcd_down.select_by_index(ind)
points_clean = np.asarray(pcd_clean.points)
# 2. 拟合地面并分割(分离地面和物体)
plane_params, ground_points = fit_ground_plane(points_clean)
ground_pcd = o3d.geometry.PointCloud(o3d.utility.Vector3dVector(ground_points))
# 计算所有点到地面的距离,筛选非地面点(物体点)
distances = point_to_plane_distance(points_clean, plane_params)
object_indices = np.where(distances > 0.05)[0] # 距离地面>0.05的为物体点
object_pcd = pcd_clean.select_by_index(object_indices)
# 3. 物体聚类(分割多个物体)
with o3d.utility.VerbosityContextManager(o3d.utility.VerbosityLevel.Error):
labels = np.array(object_pcd.cluster_dbscan(
eps=cluster_threshold,
min_points=min_points_per_object,
print_progress=False
))
max_label = labels.max()
if max_label < 0:
raise ValueError("未检测到物体点云!")
# 4. 批量计算每个物体的高度
heights = []
object_pcds = []
for label in range(max_label + 1):
object_idx = np.where(labels == label)[0]
single_object_pcd = object_pcd.select_by_index(object_idx)
# 计算当前物体高度(最高点到地面的距离)
single_points = np.asarray(single_object_pcd.points)
single_distances = point_to_plane_distance(single_points, plane_params)
height = np.max(single_distances)
heights.append(round(height, 3))
object_pcds.append(single_object_pcd)
# 5. 生成地面基准面网格
ground_aabb = o3d.geometry.AxisAlignedBoundingBox().create_from_points(ground_pcd.points)
ground_center = ground_aabb.get_center()
ground_width = ground_aabb.max_bound[0] - ground_aabb.min_bound[0]
ground_height = ground_aabb.max_bound[1] - ground_aabb.min_bound[1]
ground_plane = create_plane_compatible(
width=ground_width * 1.2,
height=ground_height * 1.2,
center=ground_center,
direction=(plane_params[0], plane_params[1], plane_params[2])
)
return heights, object_pcds, ground_plane
# ---------------------- 场景3:地形高程分析(逐点测高+可视化)----------------------
def terrain_elevation_analysis(
terrain_point_cloud: o3d.geometry.PointCloud,
grid_resolution: float = 0.5 # 高程网格分辨率(单位:米/格)
) -> tuple[np.ndarray, np.ndarray, np.ndarray]:
"""
地形高程分析(生成高程热力图网格)
参数:
terrain_point_cloud: 地形点云(含地面)
grid_resolution: 高程网格的单元格大小
返回:
elevation_grid: 高程网格(每个单元格的平均高度)
x_coords: 网格X轴坐标
y_coords: 网格Y轴坐标
"""
points = np.asarray(terrain_point_cloud.points)
# 1. 拟合地面基准面(作为高程零点)
plane_params, _ = fit_ground_plane(points)
# 2. 计算每个点的高程(到基准面的距离)
elevations = point_to_plane_distance(points, plane_params)
# 3. 生成网格并统计每个网格的平均高程
x_min, x_max = np.min(points[:, 0]), np.max(points[:, 0])
y_min, y_max = np.min(points[:, 1]), np.max(points[:, 1])
# 网格坐标
x_coords = np.arange(x_min, x_max, grid_resolution)
y_coords = np.arange(y_min, y_max, grid_resolution)
x_grid, y_grid = np.meshgrid(x_coords, y_coords)
# 统计每个网格的平均高程
elevation_grid = np.zeros_like(x_grid)
for i in range(len(y_coords)):
for j in range(len(x_coords)):
# 筛选当前网格内的点
x_mask = (points[:, 0] >= x_coords[j]) & (points[:, 0] < x_coords[j] + grid_resolution)
y_mask = (points[:, 1] >= y_coords[i]) & (points[:, 1] < y_coords[i] + grid_resolution)
grid_points_idx = np.where(x_mask & y_mask)[0]
if len(grid_points_idx) > 0:
elevation_grid[i, j] = np.mean(elevations[grid_points_idx])
else:
elevation_grid[i, j] = np.nan # 无点的网格设为NaN
return elevation_grid, x_coords, y_coords
# ---------------------- 测试示例 ----------------------
if __name__ == "__main__":
# 生成测试点云(模拟:地面 + 2个立方体物体)
def generate_test_point_cloud():
# 1. 生成地面点云(Z=0,范围(-5,5)x(-5,5))
ground_x = np.linspace(-5, 5, 200)
ground_y = np.linspace(-5, 5, 200)
gx, gy = np.meshgrid(ground_x, ground_y)
gz = np.zeros_like(gx) + np.random.normal(0, 0.01, gx.shape) # 地面微小噪声
ground_points = np.column_stack([gx.ravel(), gy.ravel(), gz.ravel()])
# 2. 生成物体1(立方体1:边长1,中心(1, 1, 0.5),高度1)
cube1_x = np.linspace(0.5, 1.5, 50)
cube1_y = np.linspace(0.5, 1.5, 50)
cube1_z = np.linspace(0, 1, 50)
cx1, cy1, cz1 = np.meshgrid(cube1_x, cube1_y, cube1_z)
cube1_points = np.column_stack([cx1.ravel(), cy1.ravel(), cz1.ravel()])
# 3. 生成物体2(立方体2:边长0.8,中心(-2, -1, 0.4),高度0.8)
cube2_x = np.linspace(-2.4, -1.6, 40)
cube2_y = np.linspace(-1.4, -0.6, 40)
cube2_z = np.linspace(0, 0.8, 40)
cx2, cy2, cz2 = np.meshgrid(cube2_x, cube2_y, cube2_z)
cube2_points = np.column_stack([cx2.ravel(), cy2.ravel(), cz2.ravel()])
# 合并所有点云
all_points = np.vstack([ground_points, cube1_points, cube2_points])
pcd = o3d.geometry.PointCloud(o3d.utility.Vector3dVector(all_points))
pcd.paint_uniform_color([0.5, 0.5, 0.5]) # 默认灰色
return pcd, cube1_points, cube2_points
# 加载测试点云
full_pcd, cube1_points, cube2_points = generate_test_point_cloud()
# ---------------------- 测试场景1:单物体测高 ----------------------
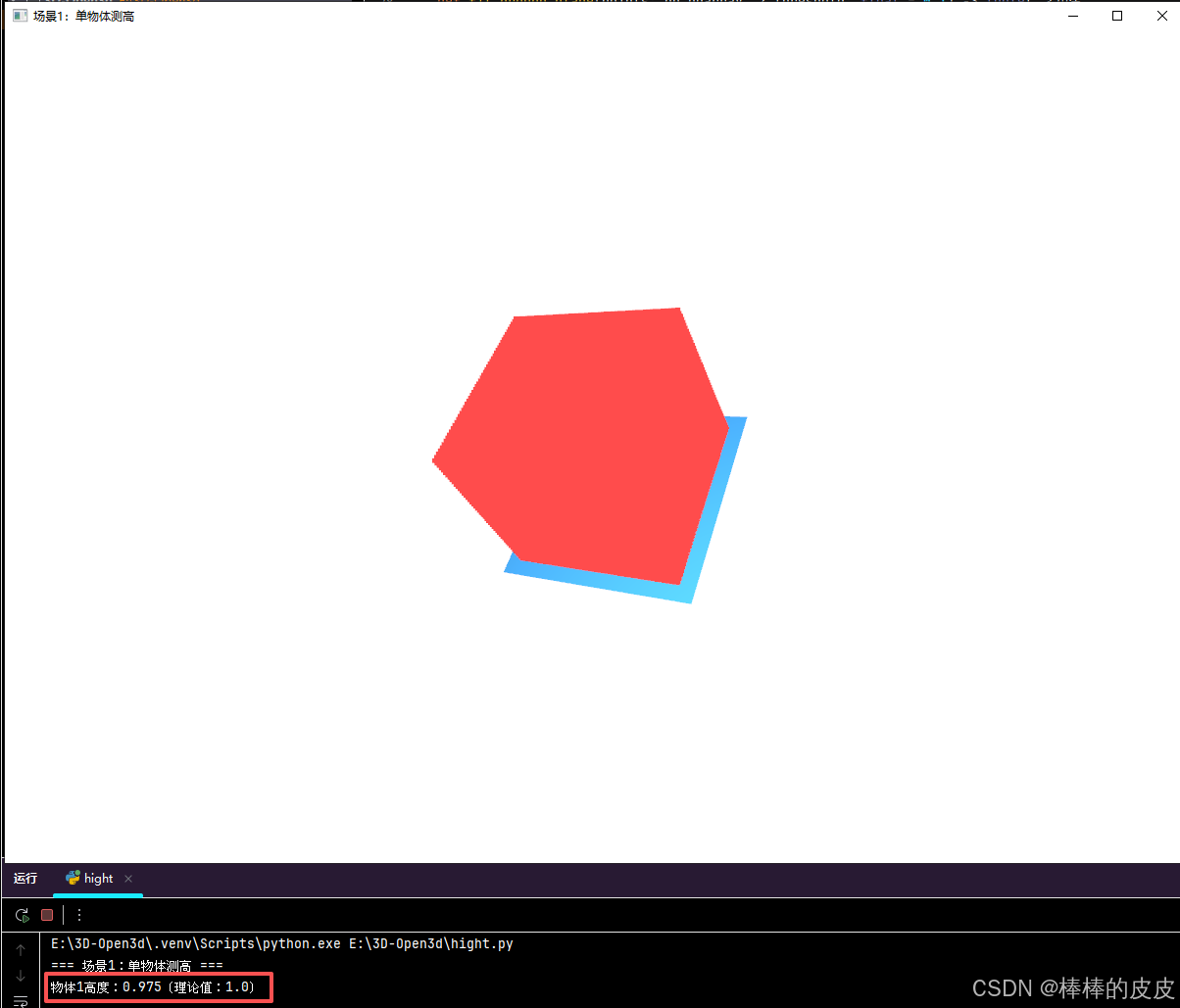
print("=== 场景1:单物体测高 ===")
cube1_pcd = o3d.geometry.PointCloud(o3d.utility.Vector3dVector(cube1_points))
cube1_pcd.paint_uniform_color([1.0, 0.3, 0.3]) # 红色
height1, base_plane1, _ = measure_single_object_height(cube1_pcd, use_fitted_plane=True)
print(f"物体1高度:{height1:.3f}(理论值:1.0)")
# 可视化
base_plane1.paint_uniform_color([0.3, 0.7, 1.0]) # 蓝色基准面
o3d.visualization.draw_geometries(
[cube1_pcd, base_plane1],
window_name="场景1:单物体测高",
lookat=[1, 1, 0.5]
)
# ---------------------- 测试场景2:多物体批量测高 ----------------------
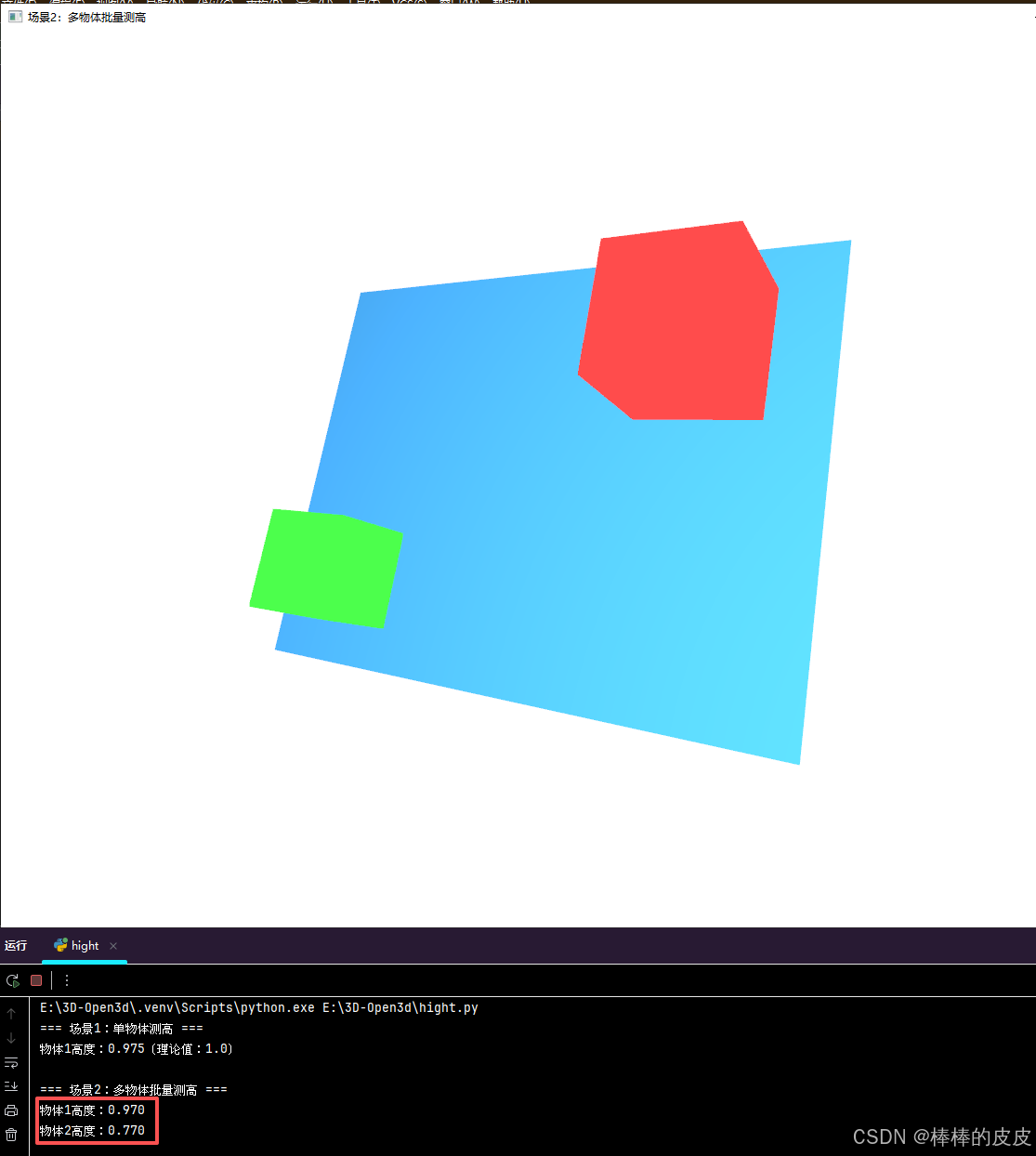
print("\n=== 场景2:多物体批量测高 ===")
heights, object_pcds, ground_plane = measure_multi_objects_height(
full_point_cloud=full_pcd,
cluster_threshold=0.15,
min_points_per_object=100
)
# 为每个物体设置不同颜色
colors = [[1.0, 0.3, 0.3], [0.3, 1.0, 0.3]] # 红、绿
for i, (height, pcd) in enumerate(zip(heights, object_pcds)):
pcd.paint_uniform_color(colors[i % len(colors)])
print(f"物体{i+1}高度:{height:.3f}")
ground_plane.paint_uniform_color([0.3, 0.7, 1.0]) # 蓝色地面
# 可视化(地面+所有物体)
o3d.visualization.draw_geometries(
[ground_plane] + object_pcds,
window_name="场景2:多物体批量测高",
lookat=[0, 0, 0]
)
# ---------------------- 测试场景3:地形高程分析 ----------------------
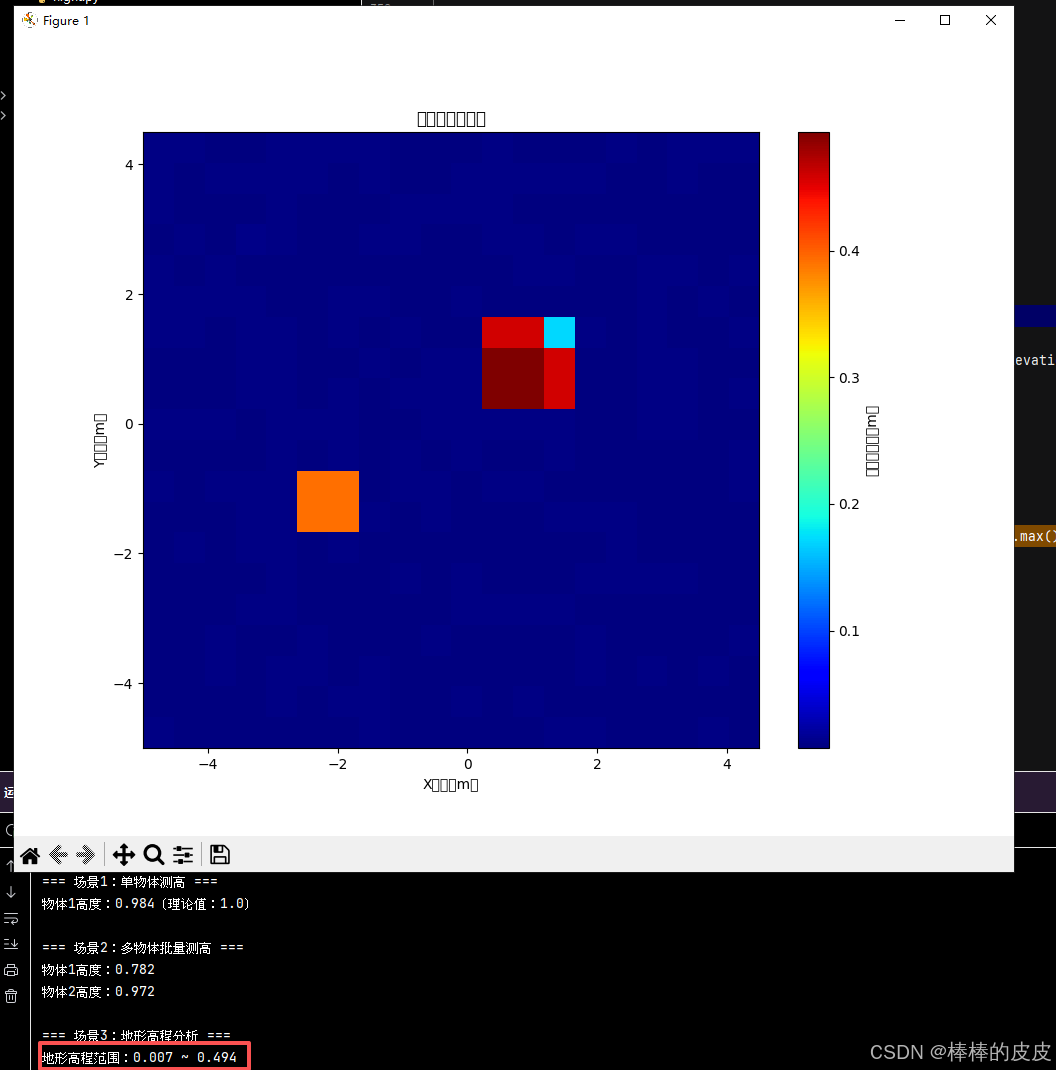
print("\n=== 场景3:地形高程分析 ===")
elevation_grid, x_coords, y_coords = terrain_elevation_analysis(
terrain_point_cloud=full_pcd,
grid_resolution=0.5
)
# 打印高程网格统计
valid_elevations = elevation_grid[~np.isnan(elevation_grid)]
print(f"地形高程范围:{np.min(valid_elevations):.3f} ~ {np.max(valid_elevations):.3f}")
# 可视化高程热力图(用matplotlib)
import matplotlib.pyplot as plt
plt.figure(figsize=(10, 8))
im = plt.imshow(
elevation_grid,
extent=[x_coords.min(), x_coords.max(), y_coords.min(), y_coords.max()],
origin="lower",
cmap="jet"
)
plt.colorbar(im, label="高程(单位:m)")
plt.xlabel("X坐标(m)")
plt.ylabel("Y坐标(m)")
plt.title("地形高程热力图")
plt.show()运行效果图
三、关键功能详解
1. 核心测高函数(point_to_plane_distance)
- 基于平面方程计算点到平面的垂直距离,是 3D 测高的核心;
- 平面方程
Ax + By + Cz + D = 0可通过两种方式获取:- 拟合地面(
fit_ground_plane,用 RANSAC 算法,抗噪性强,适合真实场景); - 手动指定(如已知地面是 Z=0 平面,方程为
0x + 0y + 1z + 0 = 0)。
- 拟合地面(
2. 单物体测高(场景 1)
- 适用于:目标物体点云已单独提取(如通过激光雷达框选、语义分割);
- 两种基准面模式:
use_fitted_plane=True:拟合地面作为基准(更准确,不受物体倾斜影响);use_fitted_plane=False:用物体包围盒底部作为基准(简化方案,适合无地面点云)。
3. 多物体批量测高(场景 2)
- 核心流程:点云预处理 → 地面拟合与分割 → 物体聚类(DBSCAN)→ 逐物体测高;
- 关键参数:
cluster_threshold:聚类距离阈值(根据点云密度调整,密度高则设小);min_points_per_object:过滤小噪声点簇,避免误检测。
4. 地形高程分析(场景 3)
- 适用于:大面积地形测量(如测绘、农业、建筑场景);
- 输出:高程网格 + 热力图,可直观展示地形起伏;
- 关键参数
grid_resolution:网格单元格大小(越小精度越高,但计算量越大)。
四、实际应用注意事项
1. 点云预处理(提升测高精度)
- 下采样 :用
voxel_down_sample减少点云数量,提升计算效率; - 去噪 :用
remove_statistical_outlier或remove_radius_outlier过滤噪声点; - 分割:确保目标物体点云与地面分离(可通过语义分割、距离筛选实现)。
2. 基准面选择
- 若场景有明确地面(如室内、户外平地),优先用
fit_ground_plane拟合,精度更高; - 若场景无地面(如空中物体),用包围盒底部或自定义参考点作为基准;
- 平面法向量需与 "垂直方向" 一致(如地面法向量为 Z 轴方向)。
3. 单位一致性
- 测高结果的单位与点云坐标单位一致(如点云是米制,高度单位就是米);
- 若点云是像素坐标(如从图像深度图生成),需先转换为物理坐标。
4. 精度优化
- 增加 RANSAC 迭代次数(
num_iterations)提升平面拟合精度; - 调整聚类阈值(
cluster_threshold)和内点距离阈值(distance_threshold)适配不同点云密度; - 对物体点云取最高点的平均距离(而非单个最高点),减少噪声影响。
五、扩展功能
- 实时测高:结合传感器(如激光雷达、深度相机)实时获取点云,重复上述流程;
- 高度可视化:在点云渲染时,按高度映射颜色(如高度越高越红);
- 批量处理:遍历文件夹内所有点云文件,自动输出每个文件的物体高度;
- 导出结果:将高程网格、物体高度保存为 CSV/JSON 文件,用于后续分析。
通过以上方案,可快速实现从点云预处理到高度测量的完整流程,适配大多数 3D 测高场景(如物体尺寸测量、地形测绘、工业检测等)。