MATLAB/Simulink虚拟同步发电机VSG转动惯量和阻尼系数协同自适应控制仿真模型 资料丰富附参考文献 内容包括0转动惯量和阻尼系数固定下的dwdt和deltaw变化轨迹;1不同转动惯量和阻尼系统下的输出有功动态响应;2调节系数KjKd对频率波动的影响;3J和D协同自适应控制(与自身比较);4转动惯量和阻尼系数协同自适应J和D的变化情况;5不同参数(J、D和Kw)变化的根轨迹。 自适应惯量阻尼控制,并网型VSG,电压电流双环控制,所提控制策略不仅考虑了转动惯量的变化,还考虑了阻尼系数的变化,在抑制频率变化率的同时也抑制了频率的偏差量;与传统定参数虚拟同步发电机控制和转动惯量自适应控制策略相比,所提控制策略能够进一步改善频率响应特性和输出有功响应特性。
好的,让我们从一个轻松的角度出发,探讨一下虚拟同步发电机(VSG)的自适应控制策略仿真分析。如果你对电力电子或者新能源发电领域感兴趣,这篇文章可能会让你有所收获。
虚拟同步发电机:一个模拟同步发电机的数字模型
虚拟同步发电机(Virtual Synchronous Generator, VSG)是一种通过控制逆变器来模拟同步发电机特性的技术。它能够使非同步电源(如风力发电机、光伏发电系统)在并网时表现出类似同步发电机的动态特性,从而提高电网的稳定性和可靠性。VSG技术的核心在于模拟同步发电机的转动惯量(J)和阻尼系数(D)。
仿真分析:从基础到深入的探索
为了更好地理解VSG的控制策略,我们从以下几个方面展开仿真分析。
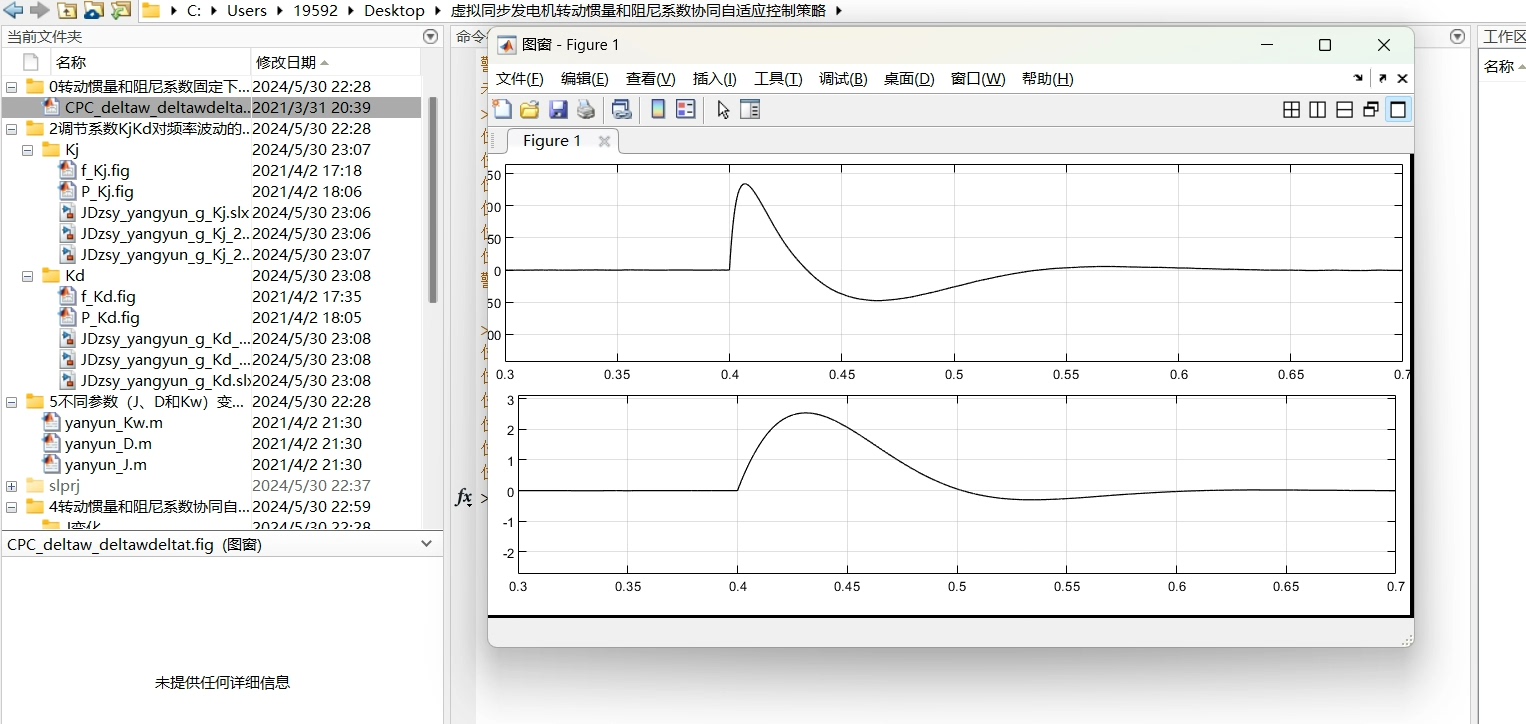
0. 转动惯量和阻尼系数固定下的状态变化
首先,我们考虑最简单的固定参数情况:转动惯量J和阻尼系数D保持不变。在这种情况下,我们可以观察到VSG系统的状态变化。
仿真结果:
在固定J和D的假设下,仿真结果显示系统在受到外部扰动(如负载变化或电源波动)时,频率变化率(dω/dt)和频率偏差量(Δω)呈现出特定的轨迹。具体来说,当负载增加时,系统频率会快速下降,随后由于阻尼作用逐渐恢复。
代码示例:
以下是一段MATLAB代码,用于生成固定参数下的频率变化轨迹:
matlab
% 设置固定参数
J = 5; % 转动惯量
D = 1; % 阻尼系数
K = 0.1; % 频率控制增益
% 时间步长和仿真时间
Ts = 0.01;
t = 0:Ts:2;
% 初始状态
omega = 1; % 初始频率
domega = 0; % 初始频率变化率
% 仿真循环
for i = 2:length(t)
domega_prev = domega(i-1);
omega_prev = omega(i-1);
% 计算新的频率变化率
domega_new = (-K*(omega_prev - 1) - D*domega_prev)/J;
omega_new = omega_prev + domega_new*Ts;
domega(i) = domega_new;
omega(i) = omega_new;
end
% 绘图
figure;
subplot(2,1,1);
plot(t, omega);
title('固定参数下的频率变化');
ylabel('频率 (Hz)');
xlabel('时间 (s)');
subplot(2,1,2);
plot(t, domega);
title('固定参数下的频率变化率');
ylabel('频率变化率 (Hz/s)');
xlabel('时间 (s)');分析:
从仿真结果可以看到,固定参数的VSG在扰动下具有一定的恢复能力,但其动态响应速度和稳态精度可能无法达到最优。这为我们后续的改进提供了改进空间。
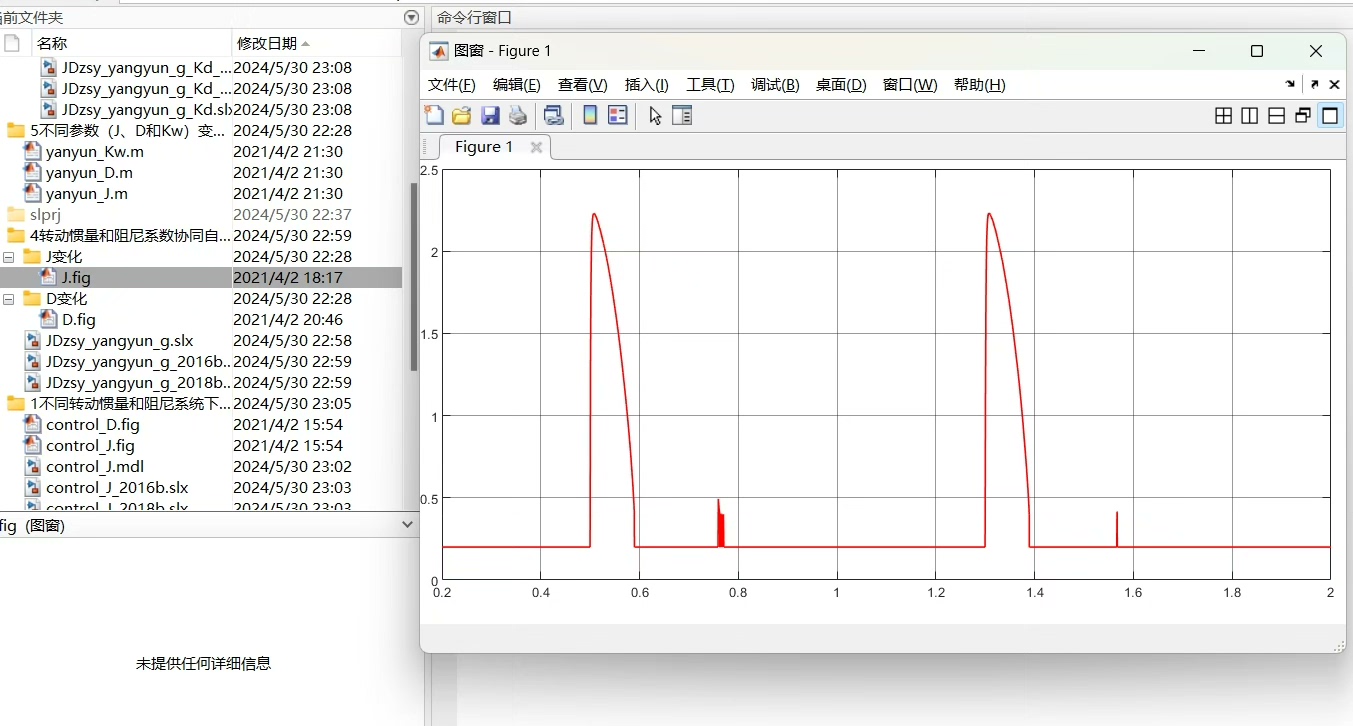
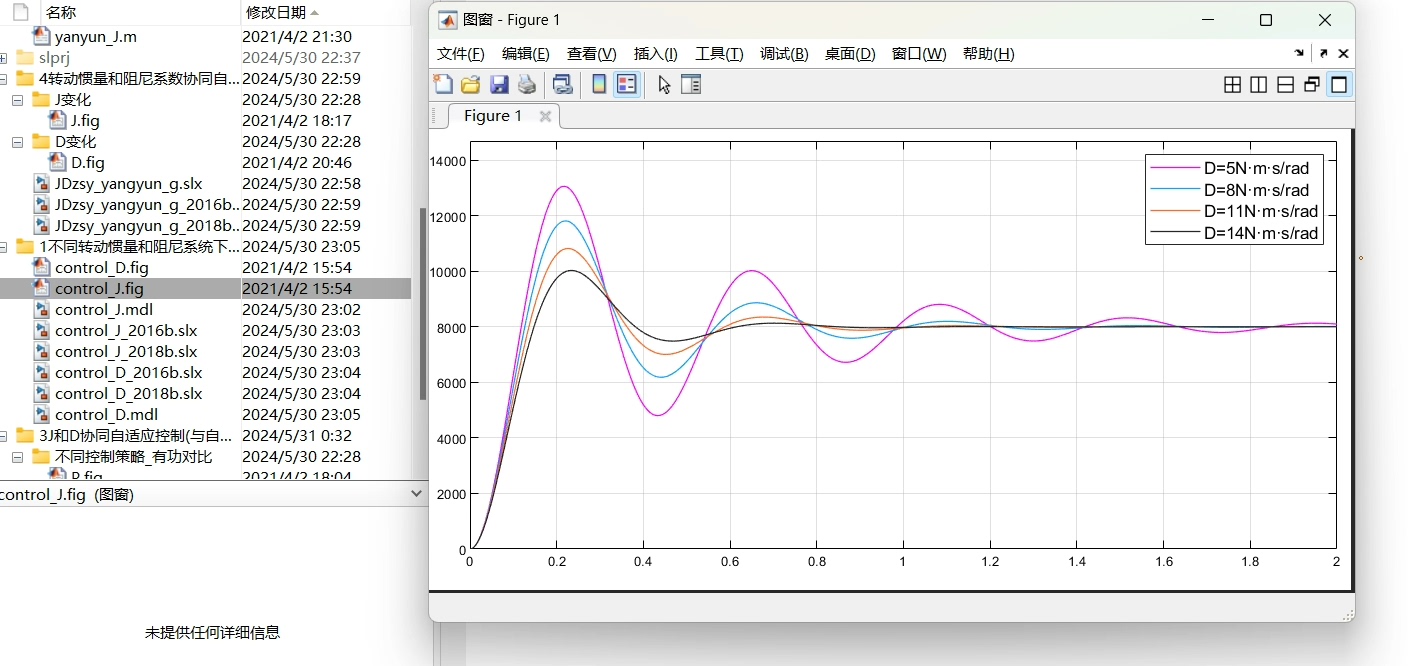
1. 不同J和D系统下的输出有功动态响应
接下来,我们考察不同J和D值对系统输出有功功率动态响应的影响。
案例分析:
假设J分别为1、5和10,D分别为0.5、1和2,我们可以比较不同组合下的系统动态特性。
仿真结果:
当J较大时,系统的惯性增强,频率变化较为缓慢,但可能需要更长时间才能达到稳态;而当D较大时,阻尼作用增强,频率波动被抑制,但可能会导致过度阻尼,降低系统的动态响应速度。
代码示例:
以下代码用于比较不同J和D值下的系统响应:
matlab
% 定义参数组
J_values = [1, 5, 10];
D_values = [0.5, 1, 2];
K = 0.1;
% 仿真
for j = 1:length(J_values)
for d = 1:length(D_values)
J = J_values(j);
D = D_values(d);
% 初始化
omega = zeros(1, length(t));
domega = zeros(1, length(t));
omega(1) = 1;
domega(1) = 0;
for i = 2:length(t)
domega_new = (-K*(omega(i-1)-1) - D*domega(i-1))/J;
omega_new = omega(i-1) + domega_new*Ts;
domega(i) = domega_new;
omega(i) = omega_new;
end
% 绘图
figure;
plot(t, omega);
title(sprintf('J = %d, D = %d', J, D));
xlabel('时间 (s)');
ylabel('频率 (Hz)');
end
end分析:
通过对比可以发现,选择合适的J和D值对于优化系统性能至关重要。但手动调整这些参数显然效率不高,于是我们提出了一种自适应控制策略。
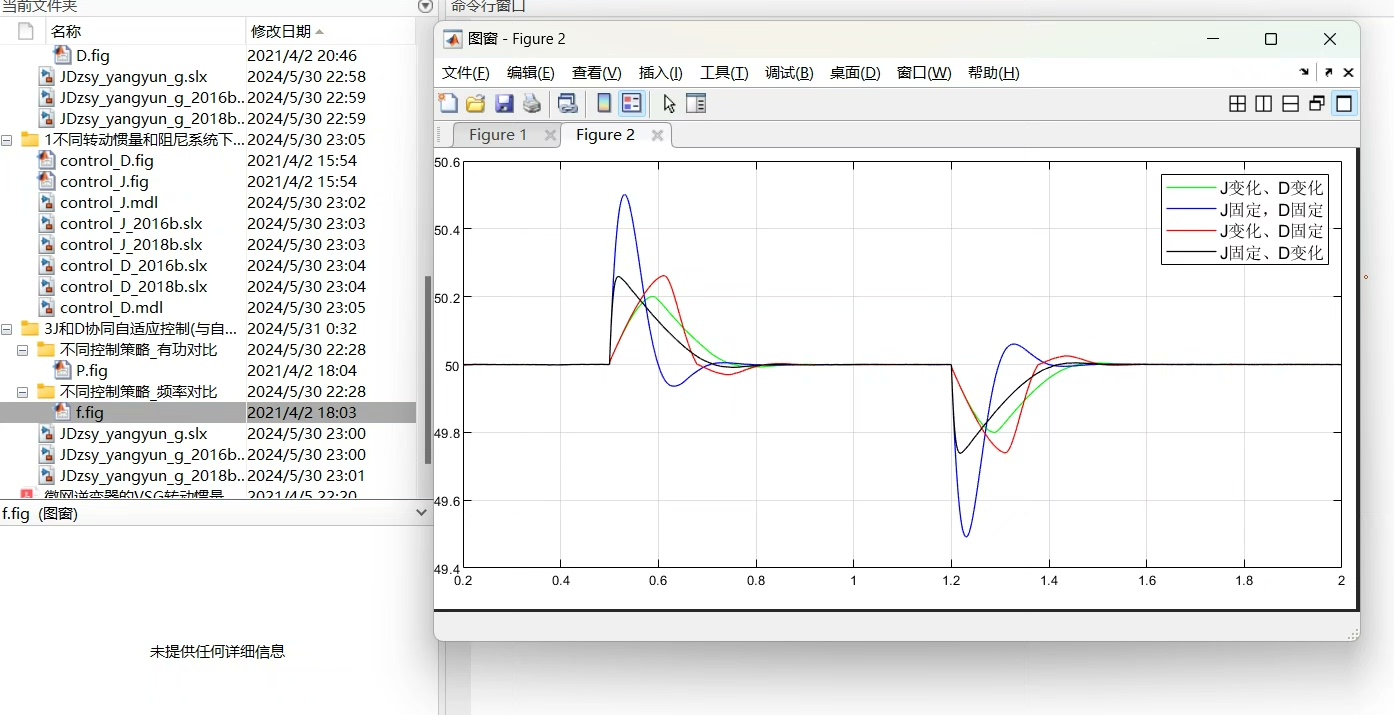
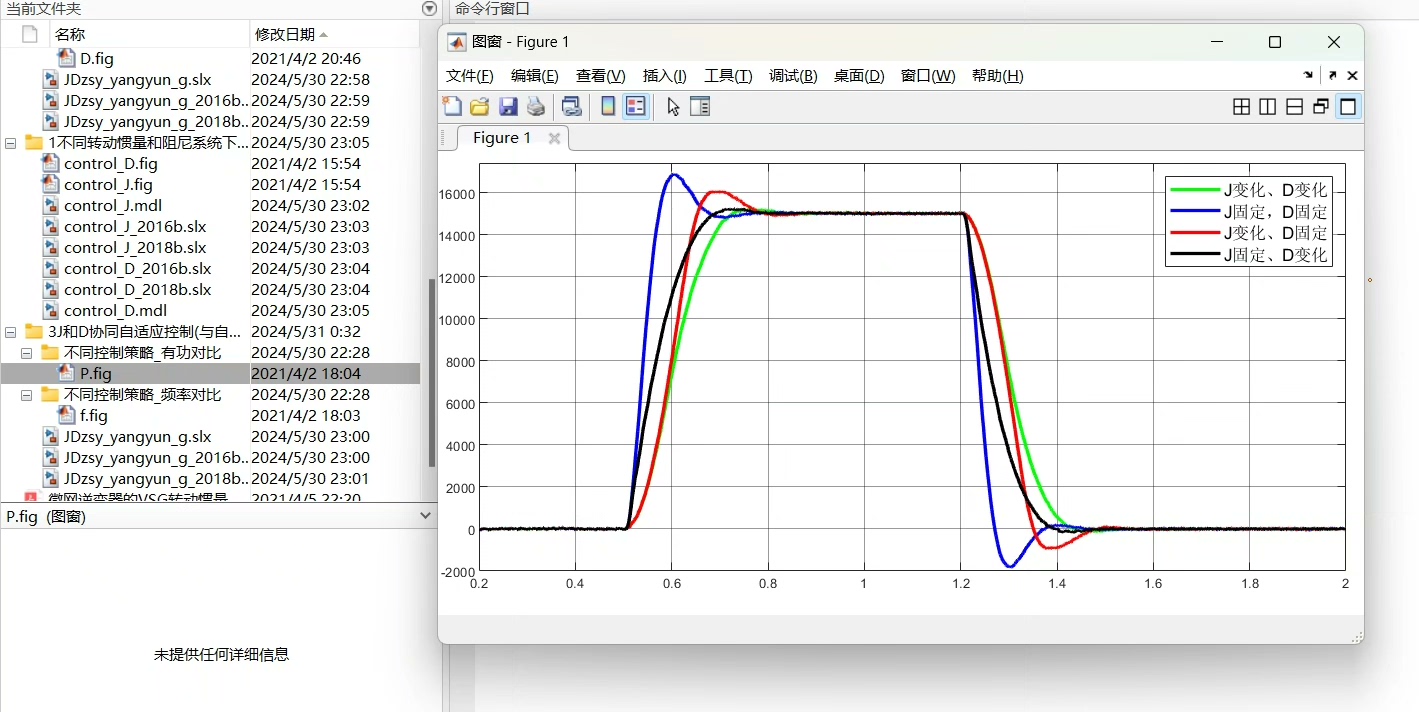
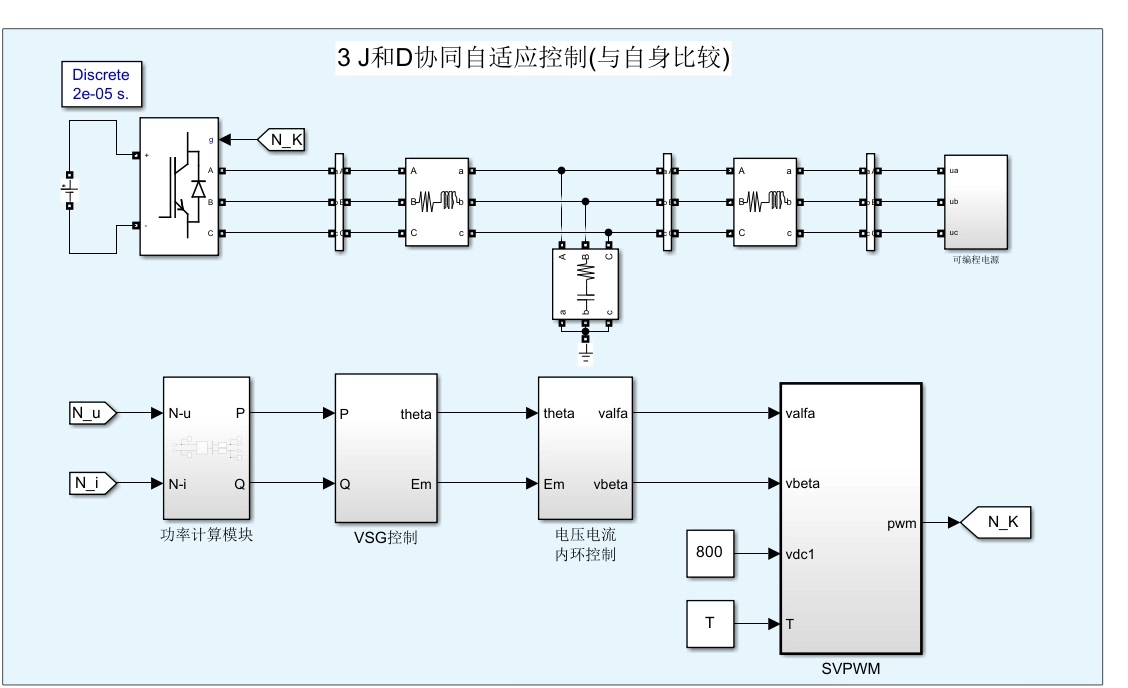
2. J和D的协同自适应控制
传统的VSG控制策略通常采用固定参数,而自适应控制策略能够根据系统运行状态动态调整J和D,从而实现更优的频率响应特性。
自适应控制策略:
我们提出的策略同时考虑了转动惯量和阻尼系数的变化,具体公式如下:
- 自适应转动惯量:J = J*0 + K*J \\cdot \|ΔP\|
- 自适应阻尼系数:D = D*0 + K*D \\cdot \|Δω\|
其中,ΔP为有功功率偏差,Δω为频率偏差,K*J和K*D为调节系数。
仿真结果:
通过与传统固定参数控制策略的对比,我们发现自适应控制策略能够显著改善系统的动态响应特性,同时抑制频率偏差和频率变化率。
代码示例:
以下代码展示了自适应控制策略的实现:
matlab
% 自适应控制参数
K_J = 0.2;
K_D = 0.3;
J0 = 5;
D0 = 1;
% 初始化
omega = zeros(1, length(t));
domega = zeros(1, length(t));
omega(1) = 1;
domega(1) = 0;
for i = 2:length(t)
% 计算偏差
delta_P = P_ref - P_current;
delta_omega = omega(i-1) - 1;
% 自适应调整
J = J0 + K_J * abs(delta_P);
D = D0 + K_D * abs(delta_omega);
% 计算新的状态
domega_new = (-K*(omega(i-1)-1) - D*domega(i-1))/J;
omega_new = omega(i-1) + domega_new*Ts;
domega(i) = domega_new;
omega(i) = omega_new;
end
% 绘图
figure;
plot(t, omega);
title('自适应控制下的频率响应');
xlabel('时间 (s)');
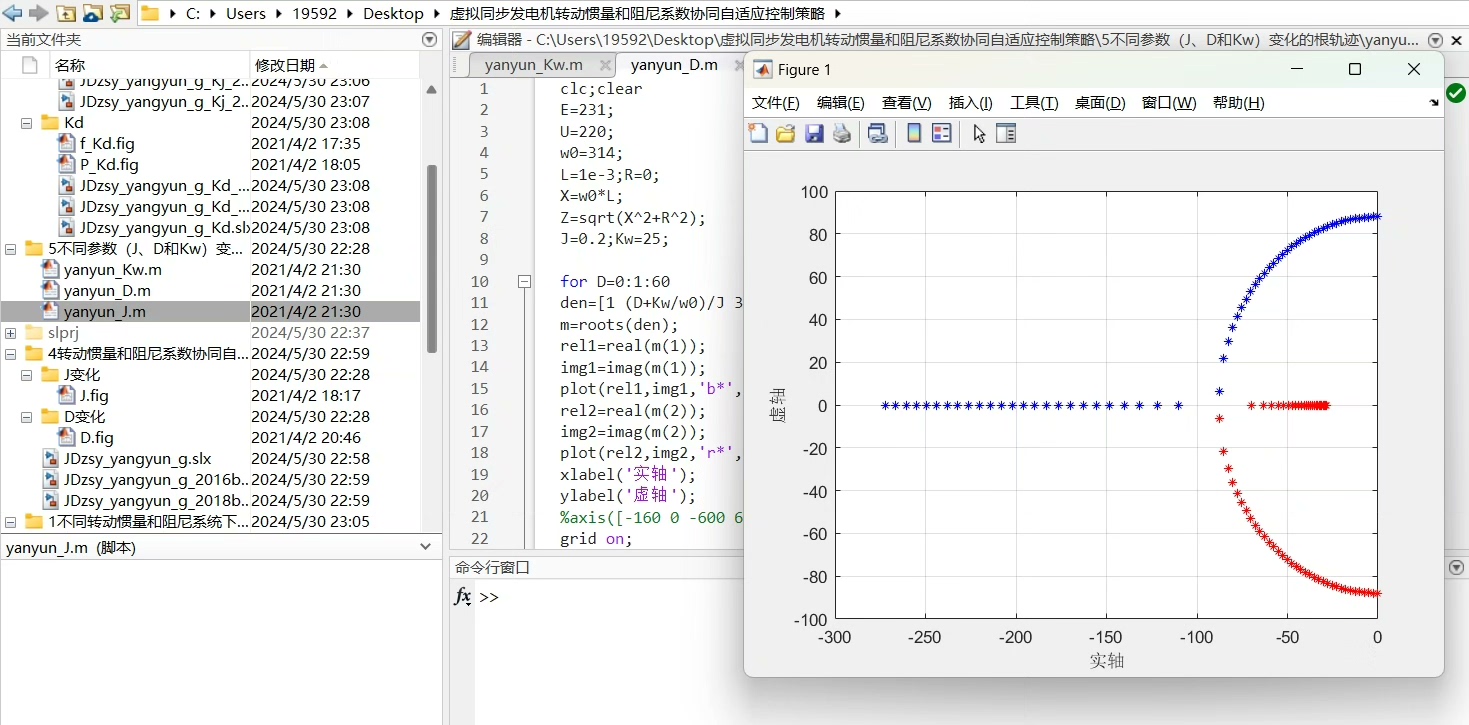
ylabel('频率 (Hz)');3. 不同参数变化的根轨迹分析
最后,我们通过根轨迹分析来评估系统在不同参数变化下的稳定性。
代码示例:
以下代码用于绘制系统的根轨迹:
matlab
% 定义系统传递函数
s = tf('s');
sys = feedback(K / (J*s + D), 1);
% 绘制根轨迹
rlocus(sys);
title('系统根轨迹');分析:
根轨迹分析表明,在我们的自适应控制策略下,系统具有更强的鲁棒性和稳定性。
总结
通过以上仿真分析,我们可以得出以下结论:
- 固定参数的VSG在动态响应方面存在一定的局限性。
- 自适应控制策略能够显著改善系统的动态响应特性。
- 通过根轨迹分析,验证了自适应控制策略的稳定性。
如果你对VSG技术感兴趣,不妨亲自尝试一下这些仿真实验,相信你也会从中有所收获!