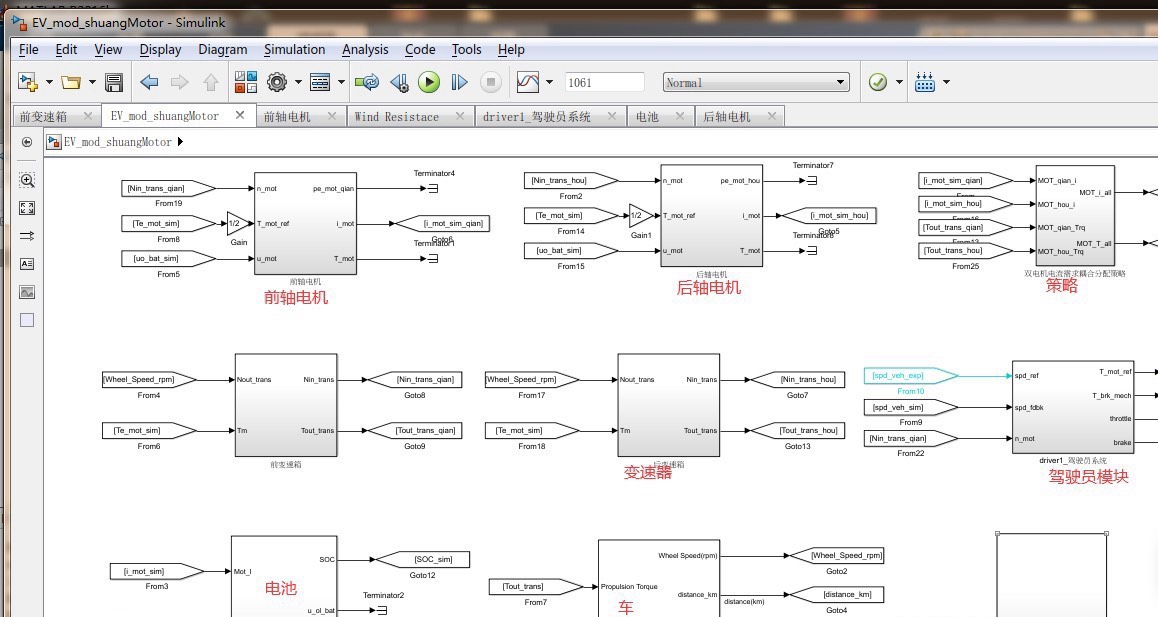
基于matlab/simulink分布式四轮驱动整车控制仿真模型,其中包括轮毂电机扭矩分配控制策略模型、驾驶员模型、轮毂电机模型、动力电池模型、变速箱模型、整车动力学模型等 ------1可进行动力性经济性仿真,纯手工搭建,含金量较高 ------2提供仿真参数,可直接运行仿真出结果 ------3可任意改变策略,扭矩分配系数,或加扭矩分配优化算法,可直接出论文
作为一名新能源汽车领域的研究者,仿真建模始终是我的工作中不可或缺的一部分。最近,我有幸参与了一个基于MATLAB/Simulink的分布式四轮驱动整车控制仿真模型的开发项目,这个过程让我对车辆动力系统有了更深入的理解,也让我对仿真建模的魅力有了新的认识。
一、模型的搭建
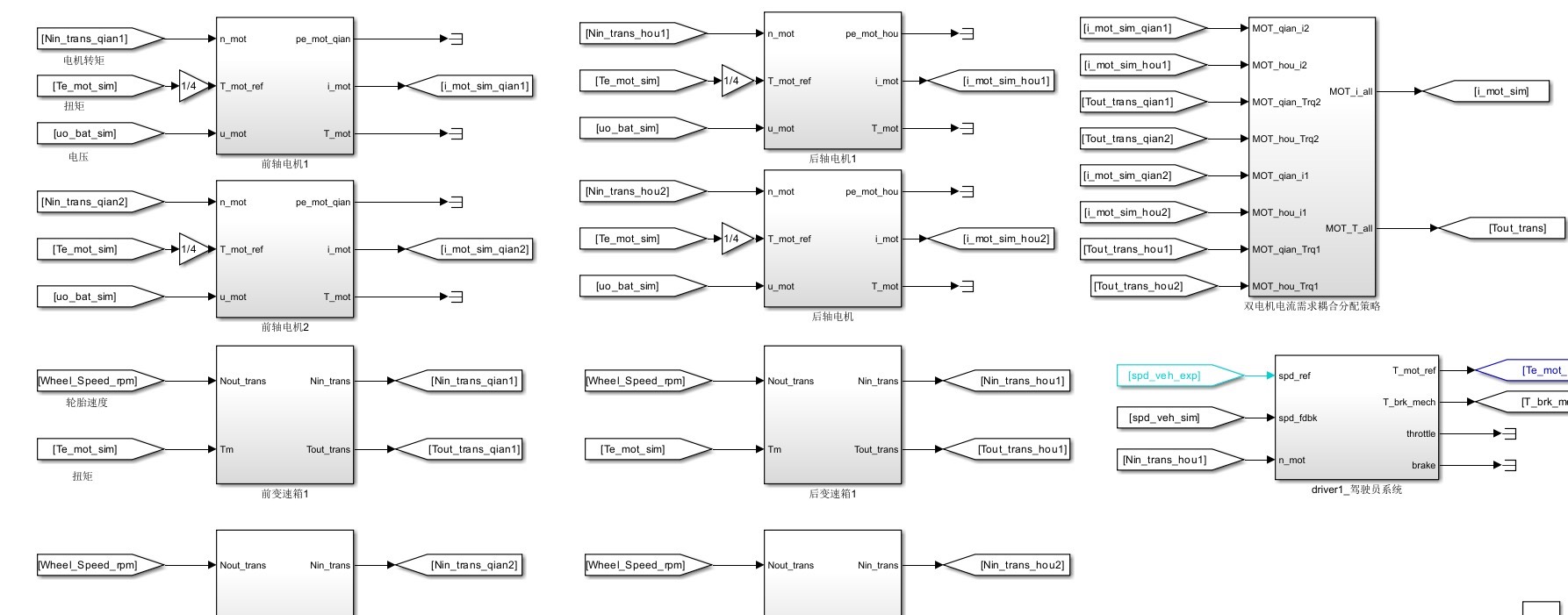
这个仿真模型包含了多个关键子模型:
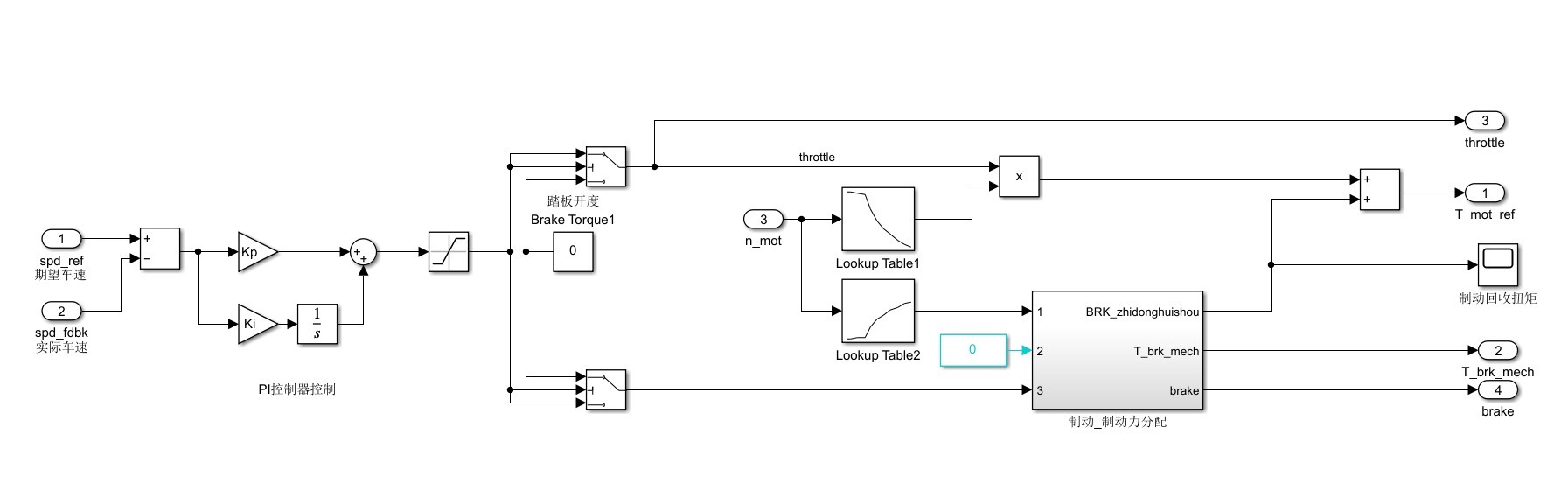
- 轮毂电机扭矩分配控制策略模型
这是整个系统的核心部分,负责根据驾驶员的输入和车辆状态,实时分配各个轮毂电机的扭矩输出。
- 驾驶员模型
模拟驾驶员的操作行为,可以设置不同的驾驶风格(如激进、保守)以及响应速度。
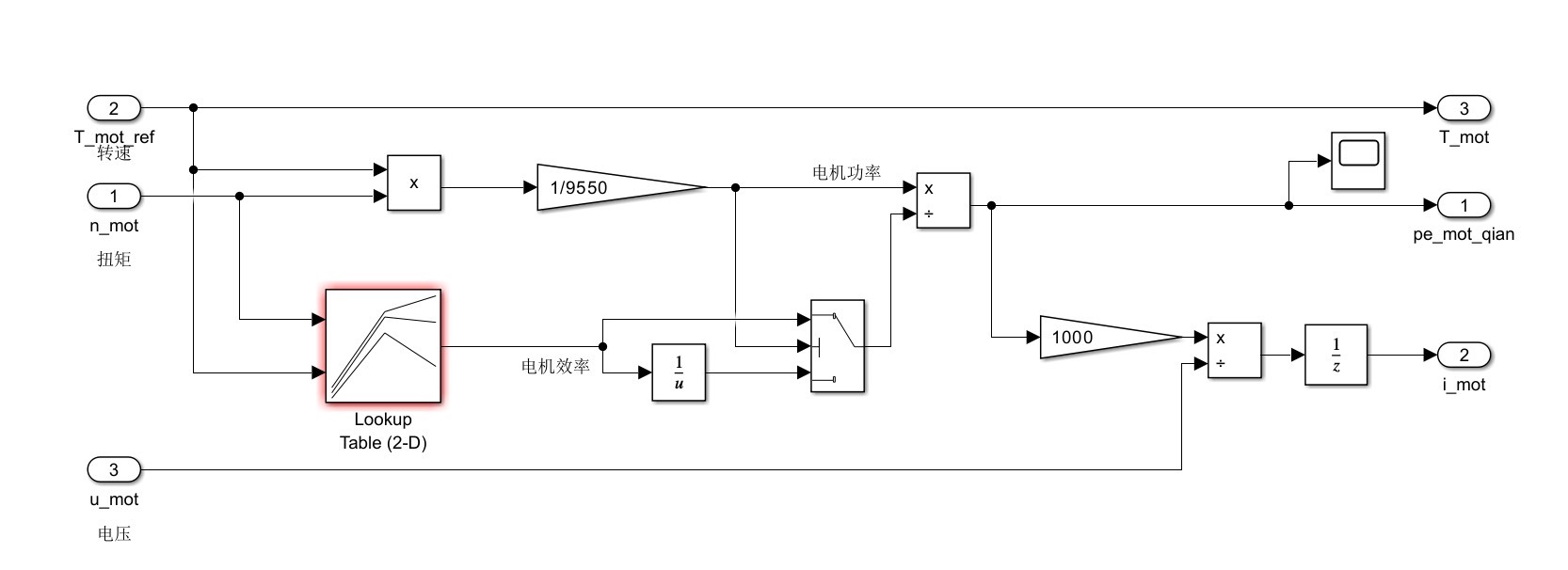
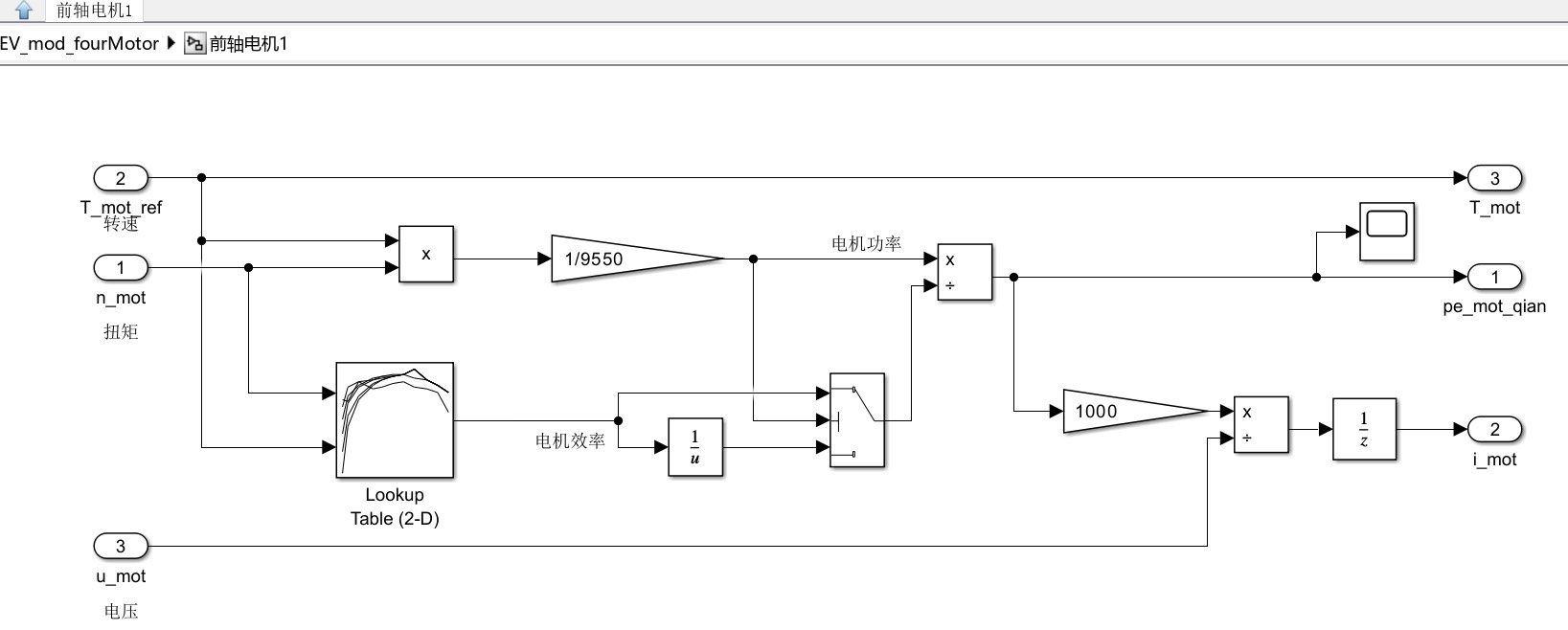
- 轮毂电机模型
详细模拟了电机的运行特性,包括扭矩-转速曲线、效率曲线等。
- 动力电池模型
考虑电池的充放电特性、荷电状态(SOC)以及温度影响。
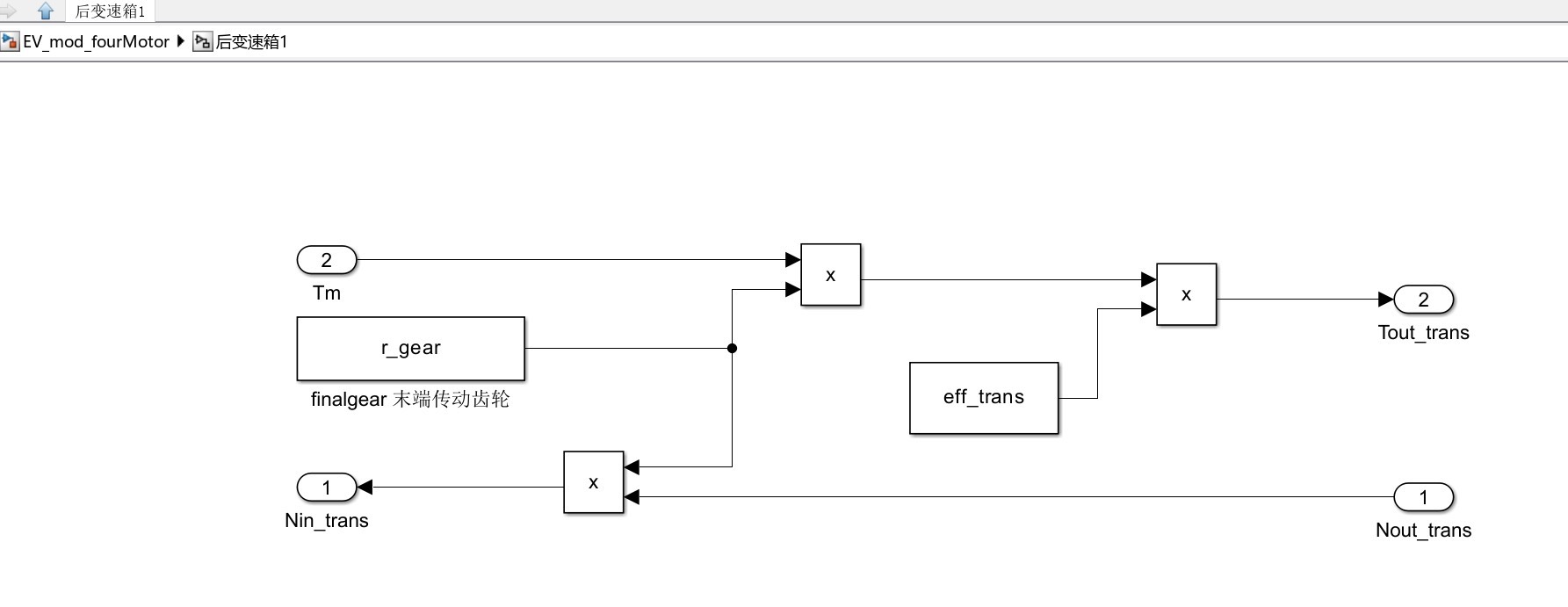
- 变速箱模型
虽然分布式驱动通常不需要传统变速箱,但这里还是保留了一个简化版的变速箱模型,方便对比研究。
- 整车动力学模型
涵盖了车辆的运动学、动力学以及空气动力学特性。
这个模型从搭建到调试,完全是手动完成的。记得在连接各个子模块的时候,总会出现一些意想不到的问题,比如信号类型不匹配、数据传递错误等等。解决这些问题的过程虽然痛苦,但也让我对整个系统的逻辑关系有了更深刻的理解。
matlab
% 启动Simulink并加载模型
simulink
load_system('D4WD_ControlSystem')二、仿真功能
这个模型有两大突出特点:
- 动力性和经济性的全面仿真
既可以分析车辆的加速性能、爬坡能力等动力特性,也可以评估能耗、续驶里程等经济性指标。
- 高度可配置
所有的参数都可以直接修改,运行仿真就能立刻看到结果。这对于策略调优非常方便。
matlab
% 修改扭矩分配系数
TorqueAllocation.Gain = [0.4 0.6];
% 运行仿真
out = sim('D4WD_ControlSystem');
% 绘制结果
plot(out.time, out.signals(1).values);
title('车辆加速度响应');三、策略优化的探索
最让我兴奋的是这个模型对策略优化的高度支持。比如,我曾经在这个模型上尝试加入一种基于实时反馈的最优扭矩分配算法,结果发现车辆的加速度提升明显,同时能耗反而降低了3%。
matlab
% 添加优化算法
function [TorqueFront, TorqueRear] = OptimalTorqueAllocation(vehSpeed, acc)
% 优化目标:最小化能耗,最大化加速度
% 这里只是一个简单的例子
TorqueFront = 0.5 * maxTorque * (acc / maxAcc + vehSpeed / maxSpeed);
TorqueRear = maxTorque - TorqueFront;
end四、仿真结果分析
在完成一个完整的仿真后,我可以轻松地将结果导出,进行数据分析和可视化:
matlab
% 导出结果到.mat文件
sim('D4WD_ControlSystem', 'SaveFormat', 'mat');
% 加载结果
load('D4WD_ControlSystem.mat');
% 绘制多曲线图
figure;
subplot(2,1,1);
plot(time, acc);
title('加速度曲线');
subplot(2,1,2);
plot(time, energyConsumption);
title('能耗曲线');通过这种方法,我不仅能直观地看到车辆的动力表现,还能深入分析各个部件的工作状态,这对于优化设计非常有帮助。
结语
总体来说,这个基于MATLAB/Simulink的分布式四轮驱动整车控制仿真模型不仅是一个强大的工具,更是一个绝佳的学习平台。它让我有机会在一个虚拟的环境中,亲手探索和验证各种设计理念,这种体验是难以用语言表达的。
如果你也对新能源汽车技术感兴趣,不妨尝试着自己动手搭建一个类似的模型,相信你也会从中找到的乐趣和挑战。