Itasca PFC6.03D 土石混合体柔性三轴试验 控制孔隙比、含石量、按级配生成试样(clump模拟块石),有一说一,三维土石混合体制样还挺麻烦 柔性三轴的体应变也可监测
最近在折腾Itasca PFC6.03D做土石混合体柔性三轴试验,发现这玩意儿的水比想象中深得多。特别是三维试样制备环节,简直能把人逼疯------孔隙比、含石量、颗粒级配三个变量互相拉扯,调参的时候感觉自己在玩三维弹球。
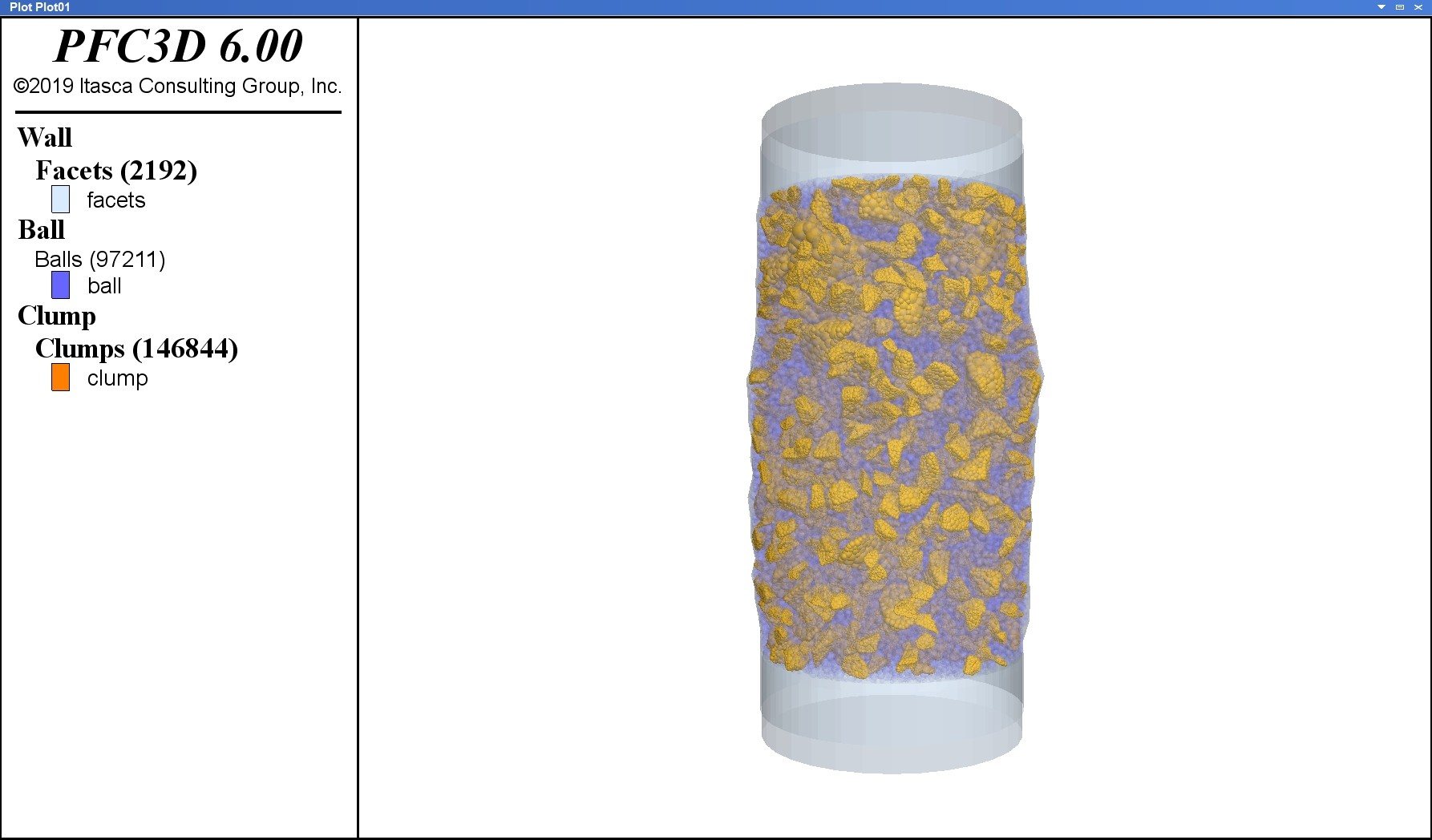
先说块石模拟这个老大难问题。用clump组装不规则颗粒时,最坑的是生成效率。我试过用球体随机组合生成碎石形状,结果要么叠在一起形成"连体婴",要么间距太大导致级配失控。后来发现用voronoi切割后随机删面的方法反而更靠谱:
text
clump template create name 'block1' ...
component create sphere ...
position 0 0 0 radius 1.0
component create sphere ...
position 1.2 0 0 radius 0.8
component create sphere ...
position 0.6 1.0 0 radius 0.6这种三球连成的clump既能保证力学性能,形状也不会太规则。不过要注意相邻球体的重叠量控制在10%-15%,不然加载时容易产生应力集中。
孔隙比控制更是玄学现场。传统方法是生成颗粒后调整尺寸,但在含石量>30%的情况下,石头和土颗粒会疯狂抢地盘。有次我设了target porosity 0.25,迭代两小时后孔隙比从0.4震荡到0.6,直接怀疑人生。后来改用分级生成策略:
- 先固定clump位置生成石块
- 用servo控制生成土颗粒
- 交替执行平衡和尺寸调整
text
model cycle 5000 calm 10
ball generate porosity 0.25 ...
radius 0.01 0.02 ...
box 0 1.0 0 1.0 0 1.0
servo activate这套组合拳打下来,孔隙比误差能控制在±0.03以内。不过遇到含石量突变的情况,还是得手动介入调整颗粒分布。
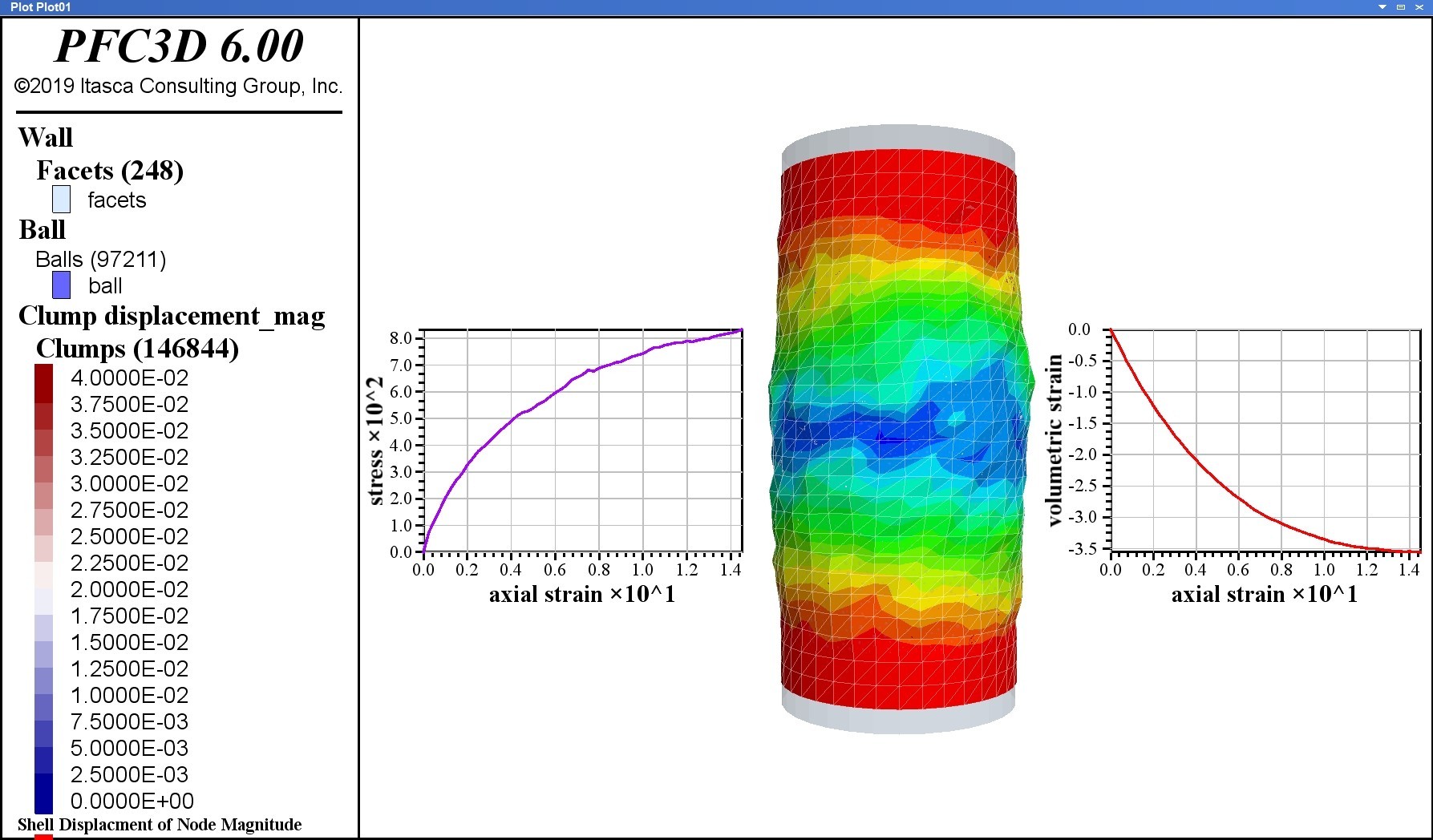
柔性三轴的体应变监测倒是意外地友好。PFC6.0新增的measurement sphere功能可以直接读取体积变化:
text
measurement create id 1 type sphere ...
center 0.5 0.5 0.5 radius 0.4
measurement history id 1 volume 配合wall的位移速率控制,能实时看到试样像被揉捏的面团一样变形。有个小技巧是把测量球体范围设置得比试样略小,避免边界效应干扰数据。
最后吐槽下这个可视化界面------当5000+颗粒开始三维旋转时,我的显卡风扇直接进入直升机起飞模式。建议新手调试时先用二维模型练手,等参数调稳了再上三维,不然硬件和心态都容易崩。