时序差分学习通常泛指一大类强化学习算法。例如,本章介绍的所有算法都属于时序差分学习的范畴。但本节所讨论的时序差分学习特指一种用于估计状态值的经典算法。TD 方法的一个特点是,它在每个时间步更新其值估计,而 MC 方法则要等到回合结束才更新
TD 算法主要内容
TD(0):估计状态价值函数 (State-Value Function) V(s)。
Sarsa:估计同轨策略动作价值函数 (On-policy Action-Value Function) Q(s, a)。
Expected Sarsa:估计期望形式的动作价值函数 (Expected Action-Value Function)。
n-step Sarsa:通过n步采样回报估计动作价值函数 Q(s, a)。
Q-learning:直接估计最优动作价值函数 (Optimal Action-Value Function) Q*(s, a)
目录:
- Robbins-Monro(RM) 算法例子
- TD(0) 算法描述
- TD算法 性质分析
一 Robbins-Monro(RM) 算法例子
下面通过三个例子,介绍一下前面学习的RM算法和后面学习的Temporal-Dierence Methods联系
1.1 mean estimation
S代表随机变量,可观测的值为 idd samples
解:
转换为 root-finding problem
含噪声的实际测量值:
迭代公式为:
1.2 状态值
, 观测值 based on iid samples
of S
解:
转换为 root-finding problem
实际样本测量值
(小写的s是实际采样的值)
迭代公式:
1.3 bellman 公式
,
观测值 based on iid samples of S
R,S are random variables, is a constant ,
is a function
obation of S,R
转换为 root-finding problem
实际样本测量值:
迭代公式:
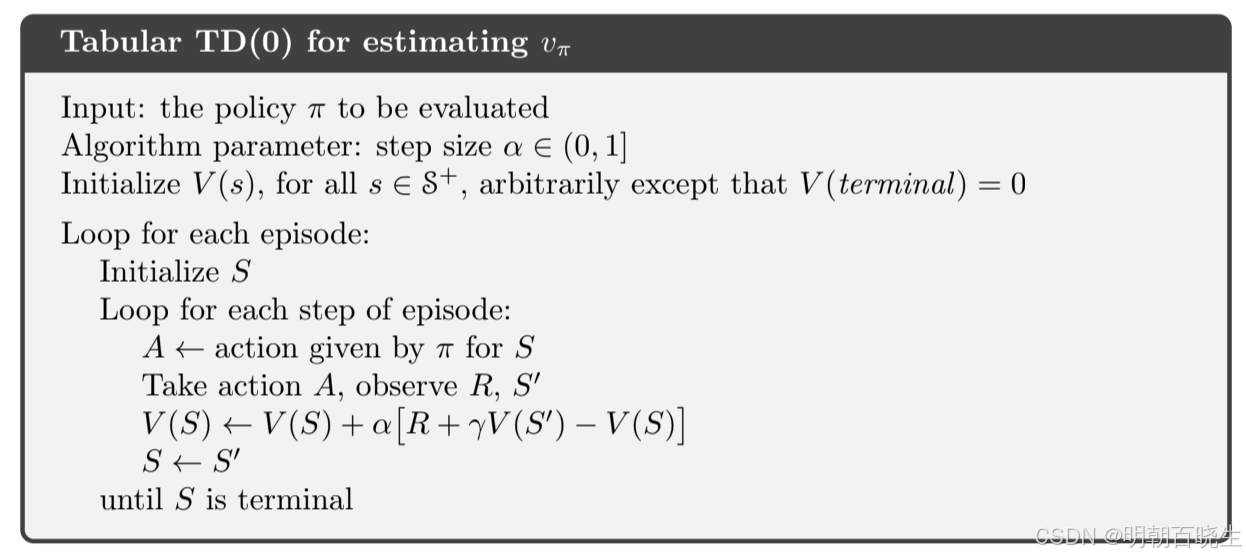
二 TD(0) 算法描述
给定策略,我们的目标是估计所有状态
对应的
。假设我们拥有遵循策略π生成的经验样本
,其中t表示时间步。以下时序差分算法可利用这些样本估计状态值:

其中.这里
表示t时刻按照策略
对
的估计值,
表示t时刻状态
对应的学习率。
需特别注意,在t时刻仅更新被访问状态的估值,如式(7.2)所示未访问状态
的估值保持不变。为简洁起见,式(7.2)常被省略,但必须意识到若缺少该式,算法在数学上将不完整。
三 TD算法 性质分析
我们主要要理解两个问题
- why
- What is the interpretation of the TD error?
式(7.1)可描述为:

其中
TD target:
TD error
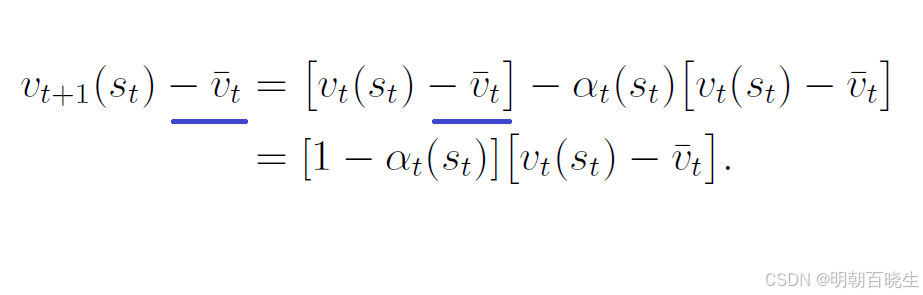
3.1 why is called TD target?
因为
将式(7.6)两边同时减去
取等式两边的绝对值:
由于
该不等式具有重要意义,它表明新值


2 What is the interpretation of the TD error?
首先,该误差之所以称为"时序差分",是因为
反映了时间步t与t+1之间的差异。
其次,它反应了和
之间的误差
当时,TD误差的期望值为:
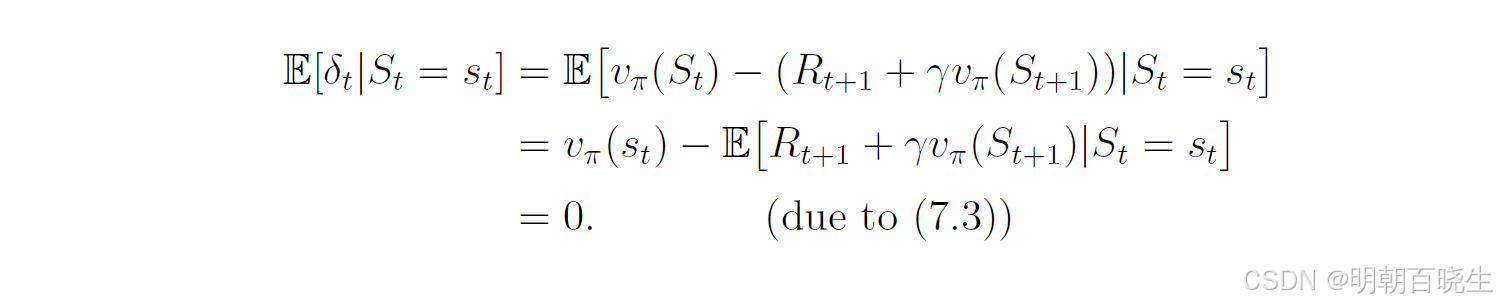
因此,TD误差不仅反映两个时间步之间的差异,更重要的是反映了估计值与真实状态值
之间的差异。
3 innovation
TD误差可解释为innovation
表示从经验样本中获取的新信息。TD学习的核心思想是基于新获得的信息来修正当前对状态值的估计。innovation在许多估计问题(如卡尔曼滤波33,34)中都具有基础性地位。
其次,式(7.1)中的TD算法仅能估计给定策略的状态值。为寻找最优策略,我们仍需进一步计算动作值并进行策略改进,这将在7.2节介绍。尽管如此,本节介绍的TD算法非常基础,对理解本章其他算法至关重要。