目录
[一、运行鱼香ROS 一键工具](#一、运行鱼香ROS 一键工具)
[二、先执行 5 → 更换系统源](#二、先执行 5 → 更换系统源)
[1)输入 5(一键配置系统源)](#1)输入 5(一键配置系统源))
[2)输入 2(更换系统源并清理第三方源)](#2)输入 2(更换系统源并清理第三方源))
[3)输入 1(添加 ROS / ROS2 官方源)](#3)输入 1(添加 ROS / ROS2 官方源))
[三、一键安装 ROS](#三、一键安装 ROS)
[四、测试 ROS 是否成功安装](#四、测试 ROS 是否成功安装)
[1)打开第 1 个终端:](#1)打开第 1 个终端:)
[2)打开第 2 个终端:](#2)打开第 2 个终端:)
[3)打开第 3 个终端:](#3)打开第 3 个终端:)
[五、配置 rosdep](#五、配置 rosdep)
[七、ROS 安装 --- 最简化流程总结](#七、ROS 安装 — 最简化流程总结)
[最简 4 步法](#最简 4 步法)
[第二步:选 5 → 系统源配置](#第二步:选 5 → 系统源配置)
[第三步:选 1 → 一键安装 ROS](#第三步:选 1 → 一键安装 ROS)
[第四步:选 3 → 一键配置 rosdep](#第四步:选 3 → 一键配置 rosdep)
前言:
许多初学者在搭建 ROS 环境时常会因系统源、依赖包或版本冲突而遭遇安装失败。本篇文章将通过"一键配置 + 一键安装"的方式,完整演示如何在 Ubuntu(18.04 及以上)系统中快速、无痛部署 ROS,帮助你高效完成环境准备。
适用系统:
Ubuntu 18.04 / 20.04 / 22.04
支持 ROS Noetic、Melodic、ROS2 Galactic/Humble 等
核心思想:
所有步骤都用一条命令完成,不用手动改源、装依赖,失败率极低。
一、运行鱼香ROS 一键工具
打开终端,输入:
cpp
wget http://fishros.com/install -O fishros && . fishros运行后会出现如下菜单:
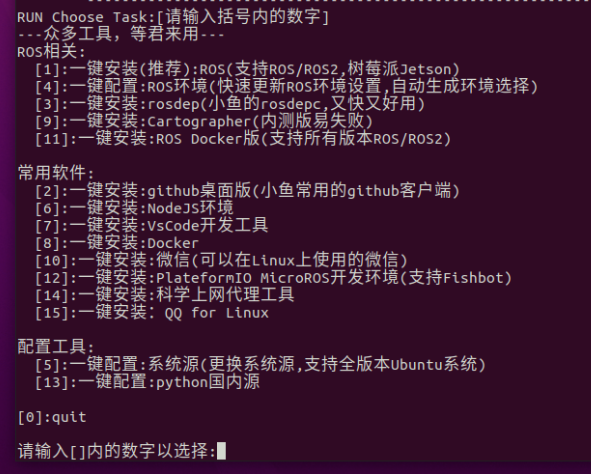
二、先执行 5 → 更换系统源
理由:90% 安装失败都是因为源被墙 / 太慢。
依次输入:
1)输入 5(一键配置系统源)
→ 进入后再选择:
2)输入 2(更换系统源并清理第三方源)
→ 完成后选择:
3)输入 1(添加 ROS / ROS2 官方源)
以上步骤会自动:
-
替换 Ubuntu apt 源为国内镜像
-
添加 ROS 官方镜像源
-
清理失败的第三方源
-
自动执行 apt update
完成后系统 apt 源已经彻底准备好。
三、一键安装 ROS
打开终端输入:
bash
wget http://fishros.com/install -O fishros && . fishros选择:
1)输入 1:一键安装 ROS / ROS2
2)选择:不更换源安装(因为你前面已经换好)
3)选择你的 Ubuntu 对应的 ROS 版本
例如:
| Ubuntu 版本 | 推荐 ROS 版本 |
|---|---|
| Ubuntu 18.04 | ROS Melodic |
| Ubuntu 20.04 | ROS Noetic |
| Ubuntu 22.04 | ROS2 Humble / Iron |
安装结束后会自动:
-
安装必要的依赖
-
安装 desktop-full
-
自动配置环境变量(source setup)
四、测试 ROS 是否成功安装
1)打开第 1 个终端:
bash
roscore出现
bash
... started core service [/rosout]说明 ROS Master 正常启动。
2)打开第 2 个终端:
bash
rosrun turtlesim turtlesim_node会看到小乌龟窗口。
3)打开第 3 个终端:
bash
rosrun turtlesim turtle_teleop_key按方向键能控制乌龟 → ROS 100% 安装成功!
五、配置 rosdep
打开终端输入:
bash
wget http://fishros.com/install -O fishros && . fishros再:
选 3 → 一键配置 rosdep
执行完会:
-
自动生成 /etc/ros/rosdep/sources.list.d/20-default.list
-
自动执行 rosdep init
-
自动执行 rosdep update
如果提示"请手动执行 XXX 命令",按照终端提示粘贴即可。
六、更新系统环境(可选)
输入:
bash
wget http://fishros.com/install -O fishros && . fishros选择:
输入 4:一键更新系统环境
功能包括:
-
自动修复 ros 环境变量
-
自动将
source /opt/ros/.../setup.bash写入.bashrc -
自动修复可能的环境冲突
让 ROS 每次打开终端都自动生效。
七、ROS 安装 --- 最简化流程总结
最终最简流程是:
最简 4 步法
第一步:打开终端
bash
wget http://fishros.com/install -O fishros && . fishros第二步:选 5 → 系统源配置
-
2:更换源 + 清理第三方源
-
1:添加 ROS 官方源
第三步:选 1 → 一键安装 ROS
第四步:选 3 → 一键配置 rosdep
(可选)选 4 → 更新系统环境
大概十来分钟,就能把咱们的ROS安装完成,大大缩减了搭建环境的时间!