为了进行后续的定位SLAM算法、路径跟踪等自动驾驶算法,需要提前采集一些环境数据,此处在我们建立的小车模型、巷道环境下采集激光雷达、IMU、关节等数据,使用rosbag保存用于后续分析处理。
1、之前我们使用rqt向cmd_vel话题写入数据,通过拖动进度条来控制小车
<node name="rqt_robot_steering" pkg="rqt_robot_steering" type="rqt_robot_steering" />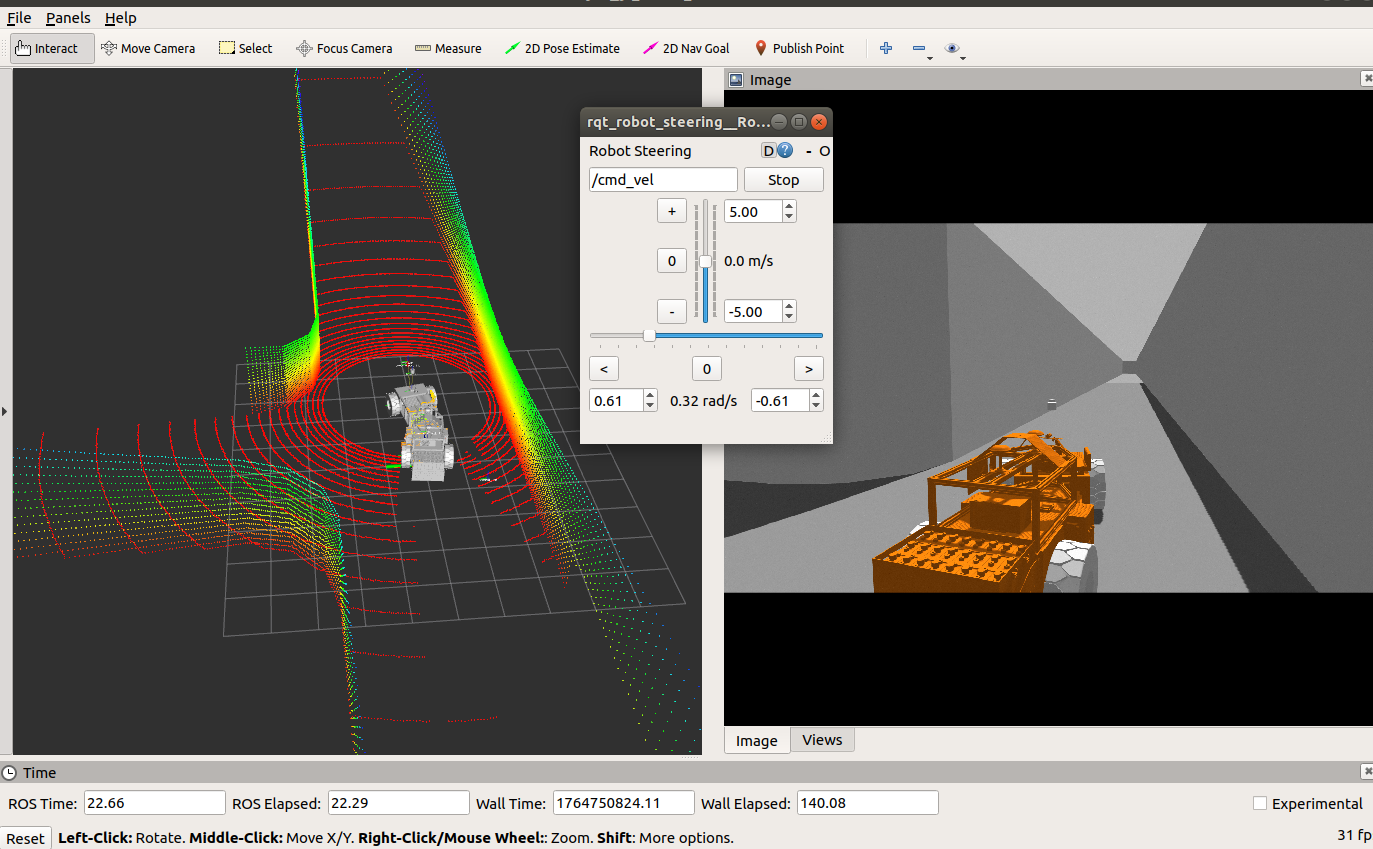
2、但是这样控制不是特别方便,因此改用键盘控制
先安装上键盘控制节点,注意:melodic替换成自己使用的版本
sudo apt install ros-melodic-teleop-twist-keyboard执行键盘控制节点,后续直接集成在启动文件
rosrun teleop_twist_keyboard teleop_twist_keyboard.py运行之前确保ros 管理器开启,若没有开启,执行下列命令
roscore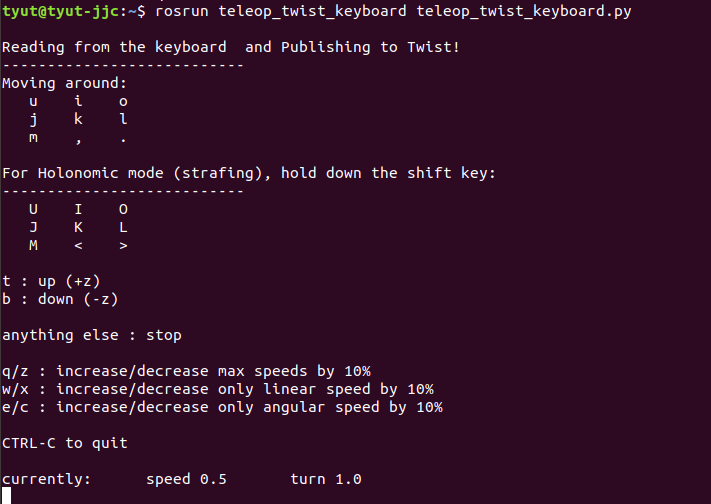
3、经过尝试也不算很方便的控制自己的小车模型,因此参考以下文章编写自己的控制键盘https://blog.csdn.net/josiah_zhao/article/details/146525779
在之前的控制功能包下创建keyboard_control_node.py文件
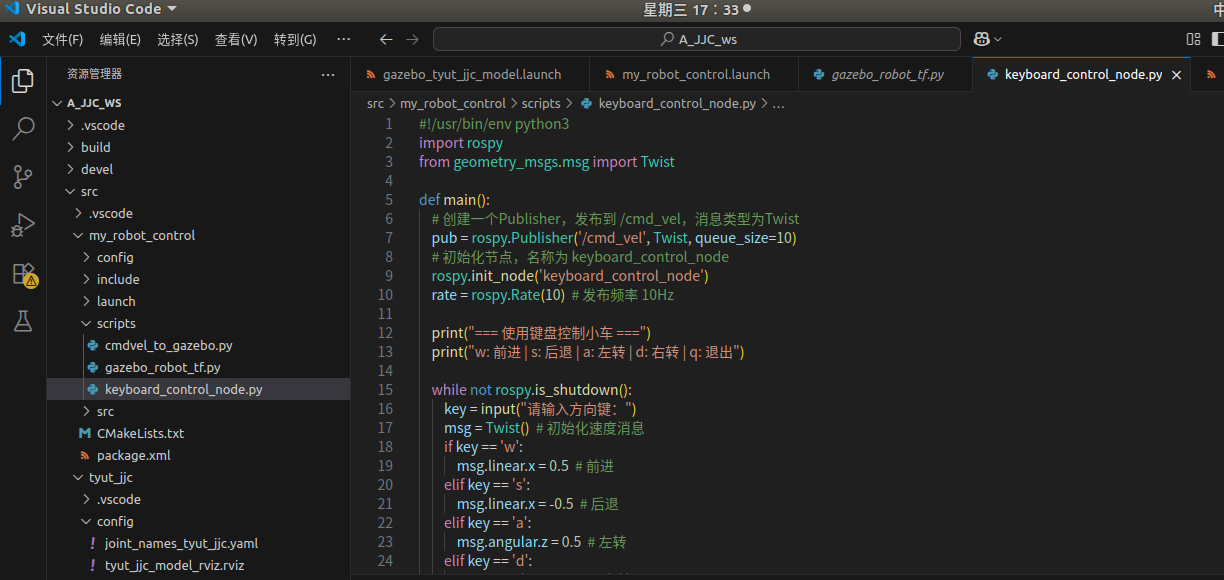
("控制指令: w前进 s后退 a左转 d右转 e直行 x停止 q退出")
python
#!/usr/bin/env python
# -*- coding: utf-8 -*-
import rospy
import sys
import tty
import termios
import select
import time
from geometry_msgs.msg import Twist
def main():
print("=== 智能键盘控制(高频检测+10Hz发布)===")
# 初始化ROS
rospy.init_node('smart_keyboard_control', anonymous=True)
pub = rospy.Publisher('/cmd_vel', Twist, queue_size=10, latch=True)
rospy.sleep(0.5)
# 速度状态
linear_x, angular_z = 0.0, 0.0
running = True
publish_count = 0
print("控制指令: w前进 s后退 a左转 d右转 e直行 x停止 q退出")
print("开始控制(高频检测+10Hz发布)...")
# 保存终端设置
fd = sys.stdin.fileno()
old_settings = termios.tcgetattr(fd)
# 设置非阻塞模式
tty.setraw(fd)
try:
last_status_time = time.time()
last_publish_time = time.time()
# 关键参数
DETECTION_INTERVAL = 0.001 # 检测频率:1000Hz(1ms)
PUBLISH_INTERVAL = 0.1 # 发布频率:10Hz(100ms)
while running and not rospy.is_shutdown():
current_time = time.time()
# ========== 高频按键检测(1000Hz) ==========
key = None
rlist, _, _ = select.select([sys.stdin], [], [], 0.0) # 立即返回
if rlist:
try:
key = sys.stdin.read(1)
except:
pass
# 立即处理按键(无延迟)
if key:
if key == 'w':
linear_x, angular_z = 5.0, 0.0
print("\n🎯 前进")
elif key == 's':
linear_x, angular_z = -5.0, 0.0
print("\n🎯 后退")
elif key == 'a':
angular_z = 0.61
print("\n🎯 左转")
elif key == 'd':
angular_z = -0.61
print("\n🎯 右转")
elif key == 'e':
angular_z = 0.0
print("\n🎯 直行")
elif key == 'x':
linear_x, angular_z = 0.0, 0.0
print("\n🎯 停止")
elif key == 'q':
running = False
print("\n🎯 退出")
# ========== 低频消息发布(10Hz) ==========
if current_time - last_publish_time >= PUBLISH_INTERVAL:
msg = Twist()
msg.linear.x = linear_x
msg.angular.z = angular_z
pub.publish(msg)
publish_count += 1
last_publish_time = current_time
# ========== 状态显示(0.5秒更新) ==========
if current_time - last_status_time > 0.5:
subscribers = pub.get_num_connections()
status = "⚡ 发布:%d | 速度:%.1f | 转向:%.2f | 检测:1000Hz | 发布:10Hz" % (
publish_count, linear_x, angular_z)
print("\r" + status + " " * 10),
sys.stdout.flush()
last_status_time = current_time
# 保持高频检测循环
time.sleep(DETECTION_INTERVAL)
except KeyboardInterrupt:
print("\n用户中断")
except Exception as e:
print("错误: %s" % e)
finally:
# 清理
termios.tcsetattr(fd, termios.TCSADRAIN, old_settings)
pub.publish(Twist())
print("\n退出")
if __name__ == '__main__':
main()赋予py执行权限
python
sudo chmod +x keyboard_control_node.py 并在keyboard_control_node.py 路径下打开终端,启动节点

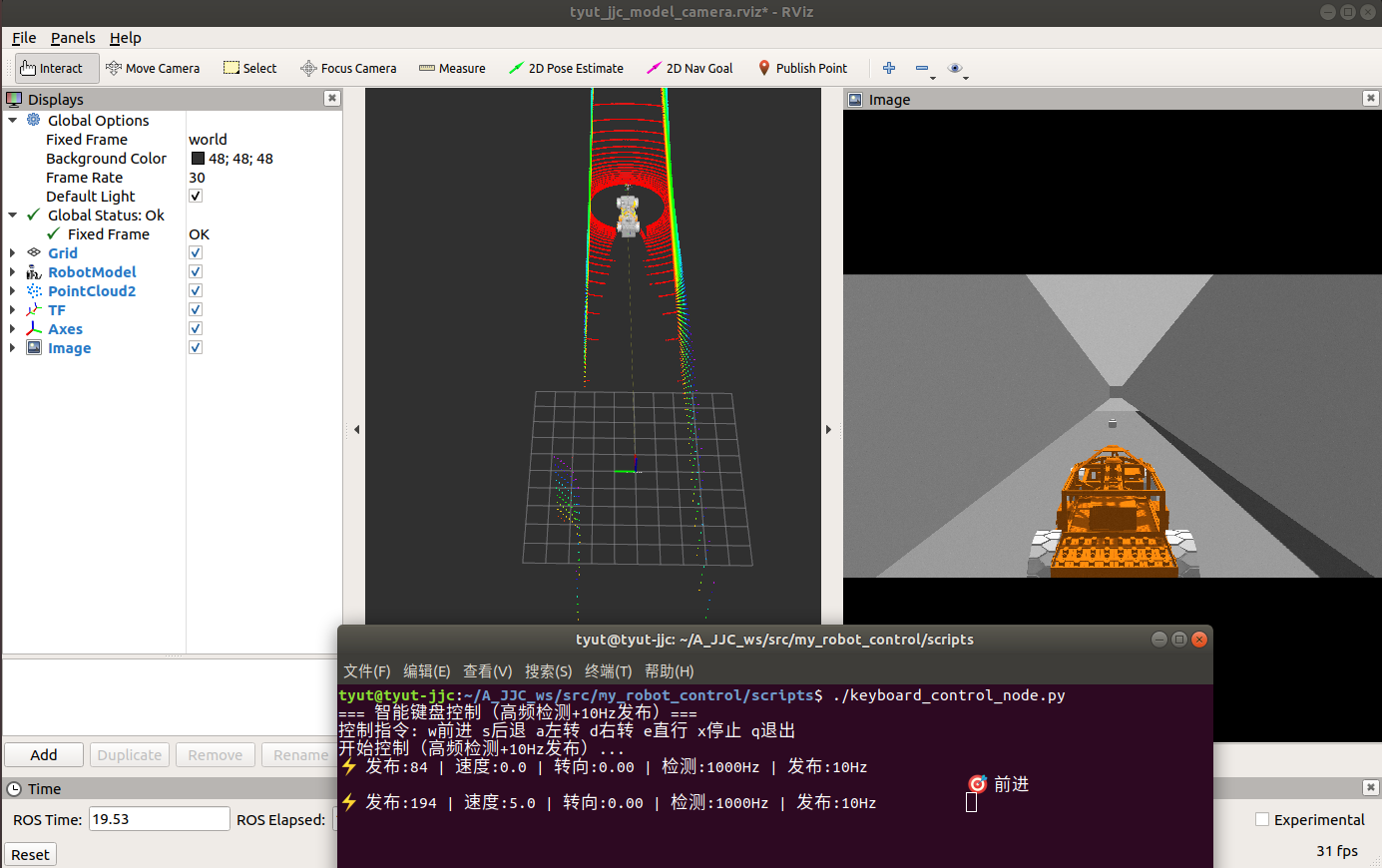
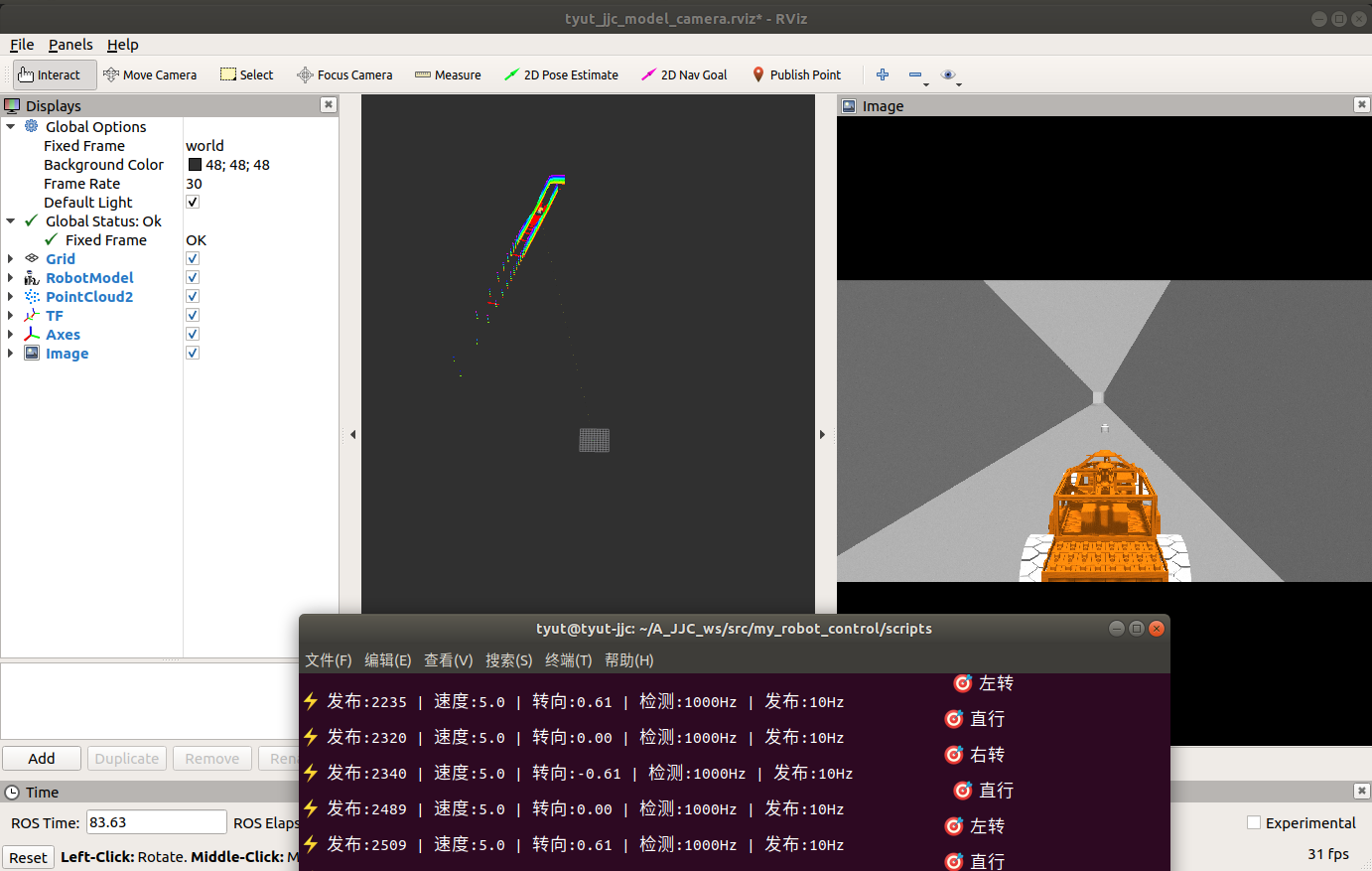
4、启动后控制,效果如下: