一种基于YOLOv8改进的高精度红外小目标检测算法 (自研) 创新点: 1)SPD-Conv特别是在处理低分辨率图像和小物体等更困难的任务时优势明显; 2)引入Wasserstein Distance Loss提升小目标检测能力; 3)YOLOv8中的Conv用cvpr2024中的DynamicConv代替; 组合创新,可直接使用至其他小目标检测任务; 实验结果:在红外小目标检测任务中mAP由原始的0.755 提升至0.901 #达人在线帮忙 #手机数码换新
嘿,各位技术小伙伴们!今天来跟大家分享一种超厉害的基于YOLOv8改进的高精度红外小目标检测算法,全是自研干货哦!
创新点剖析
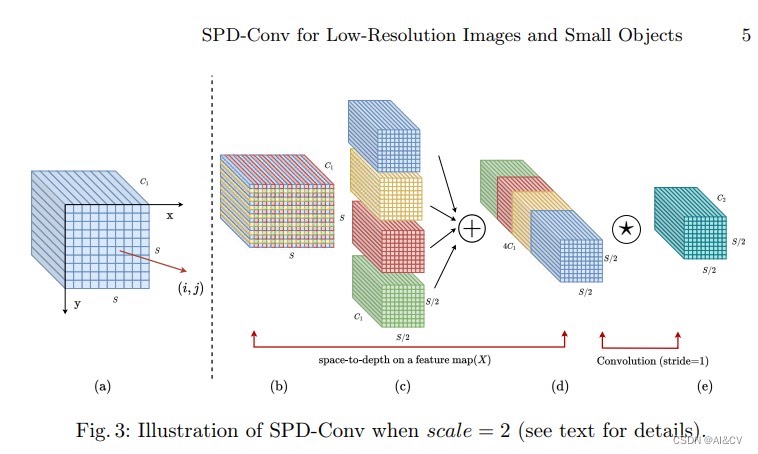
1. SPD - Conv的独特优势
SPD - Conv在处理低分辨率图像和小物体这类困难任务时,表现堪称卓越。想象一下,在那些细节模糊、目标微小的红外图像里,普通卷积可能就"抓瞎"了,但SPD - Conv却能大显身手。
简单来说,它可能在卷积核的设计或者计算方式上有独特之处,让它在面对低分辨率和小目标时,能够更有效地提取特征。比如说,传统卷积核在处理小目标时,由于感受野的限制,可能无法全面捕捉目标信息。而SPD - Conv也许通过调整感受野大小,或者采用一种更灵活的卷积计算方式,使得即使目标很小、图像分辨率不高,也能精准地提取到关键特征。
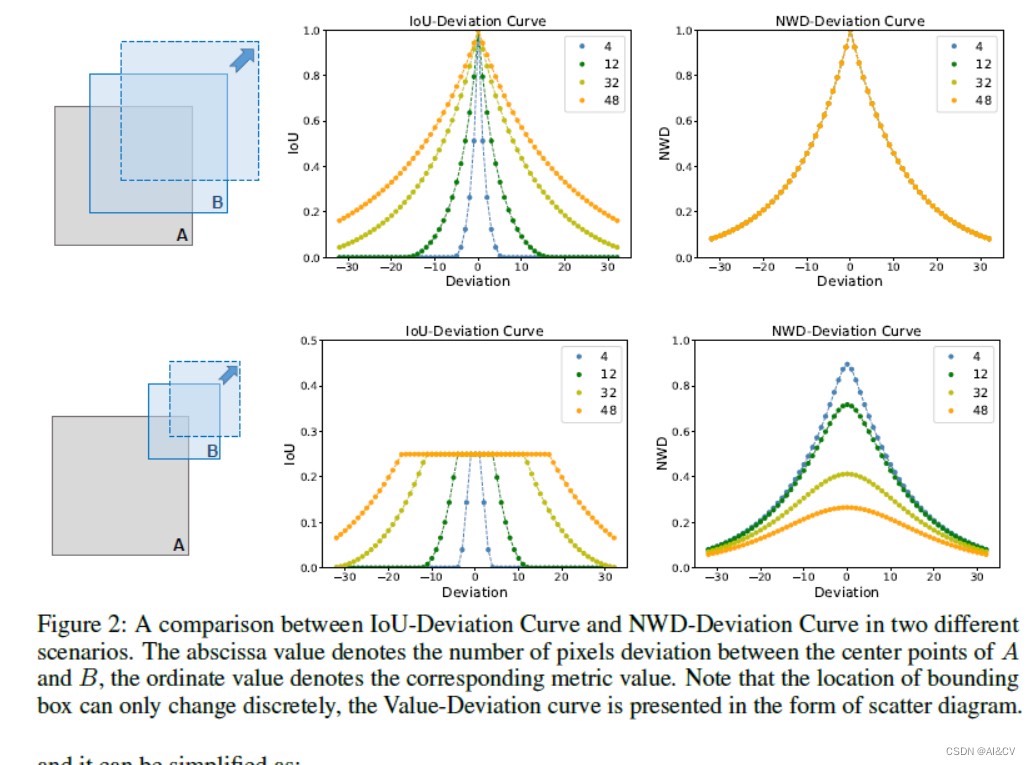
2. Wasserstein Distance Loss来助力
引入Wasserstein Distance Loss可是提升小目标检测能力的一大杀器。在目标检测任务里,损失函数就像是一个指南针,引导模型朝着正确的方向学习。传统的损失函数在处理小目标时,可能会出现一些偏差,导致模型对小目标的检测效果不佳。
而Wasserstein Distance Loss能更好地衡量预测结果和真实结果之间的差异。它可以让模型更加关注小目标,减少对小目标的误判。这里简单写个伪代码示例来感受下它的作用:
python
# 假设我们有预测的边界框和真实的边界框
pred_boxes = # 预测的边界框数据
gt_boxes = # 真实的边界框数据
# 计算Wasserstein Distance Loss
wasserstein_loss = calculate_wasserstein_loss(pred_boxes, gt_boxes)
# 这里calculate_wasserstein_loss是自定义的计算Wasserstein Distance Loss的函数通过最小化这个Wasserstein Distance Loss,模型会不断优化对小目标的检测性能。
3. 用DynamicConv替换Conv
把YOLOv8中的Conv用cvpr2024中的DynamicConv代替,这又是一个神来之笔。DynamicConv相比传统的Conv,它的卷积核不再是固定不变的,而是可以根据输入数据动态调整。
在红外小目标检测中,不同的小目标可能具有不同的特征模式。DynamicConv能够自适应地根据当前输入的图像区域,调整卷积核的参数,从而更精准地提取每个小目标的独特特征。下面来段简单代码示意:
python
import torch
import torch.nn as nn
# 假设这是一个简单的DynamicConv层定义
class DynamicConv(nn.Module):
def __init__(self, in_channels, out_channels, kernel_size):
super(DynamicConv, self).__init__()
self.in_channels = in_channels
self.out_channels = out_channels
self.kernel_size = kernel_size
# 这里可以定义动态生成卷积核的参数等
def forward(self, x):
# 动态生成卷积核
dynamic_kernel = self.generate_dynamic_kernel()
# 使用动态卷积核进行卷积操作
output = nn.functional.conv2d(x, dynamic_kernel, padding=self.kernel_size//2)
return output这样的替换,让模型在面对红外小目标时更加"智能",能够灵活应对各种复杂的小目标特征。
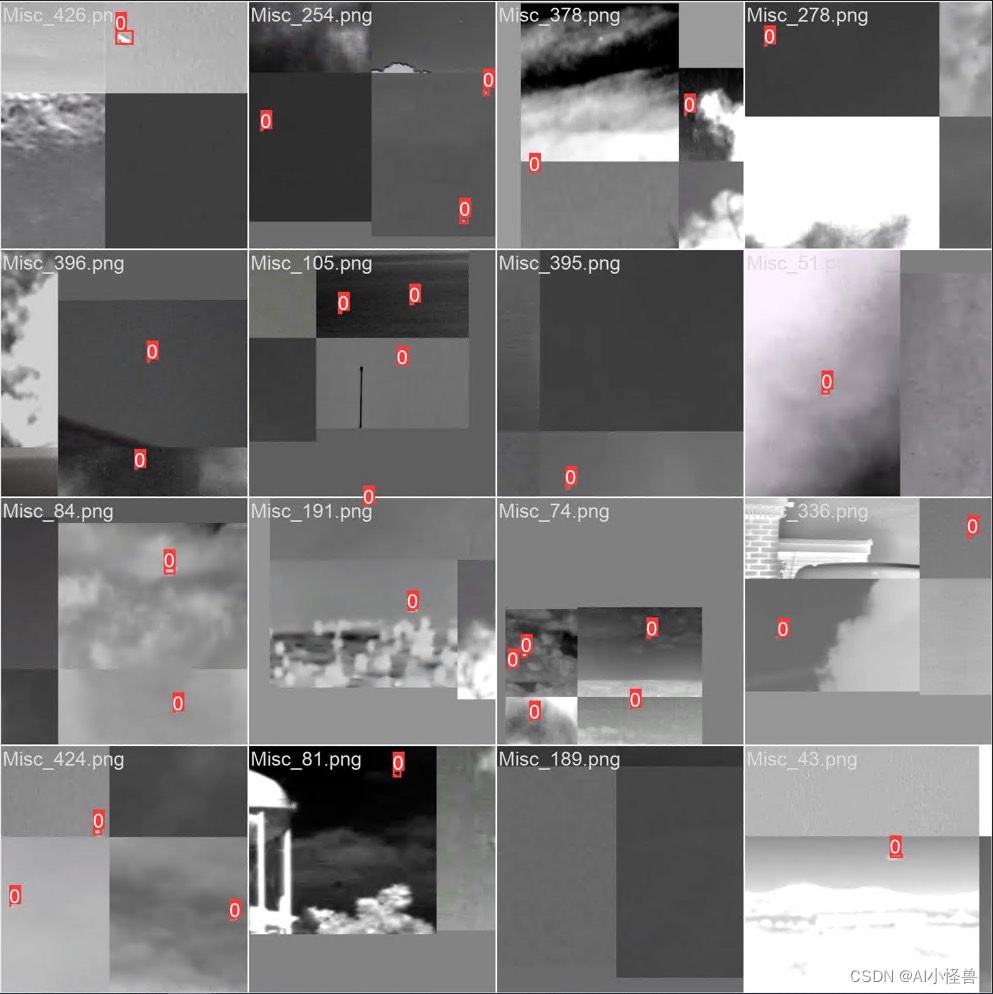
实验成果超惊艳
这种组合创新的算法可不是纸上谈兵,实际实验效果简直亮瞎眼!在红外小目标检测任务中,mAP(平均精度均值)从原始的0.755 一下子提升到了0.901 ,这可是相当大的飞跃啊!这意味着我们的算法在检测红外小目标时,准确率大大提高,能够更精准地识别出那些隐藏在红外图像中的小目标。
而且这种算法超实用,能够直接应用到其他小目标检测任务中,简直就是小目标检测领域的万能钥匙。
好啦,今天的分享就到这儿,希望这种自研的基于YOLOv8改进的算法能给大家在小目标检测方面带来新的思路和启发! #达人在线帮忙 #手机数码换新
以上就是我这次要分享的全部内容,小伙伴们要是有啥想法或者疑问,欢迎在评论区留言交流呀!