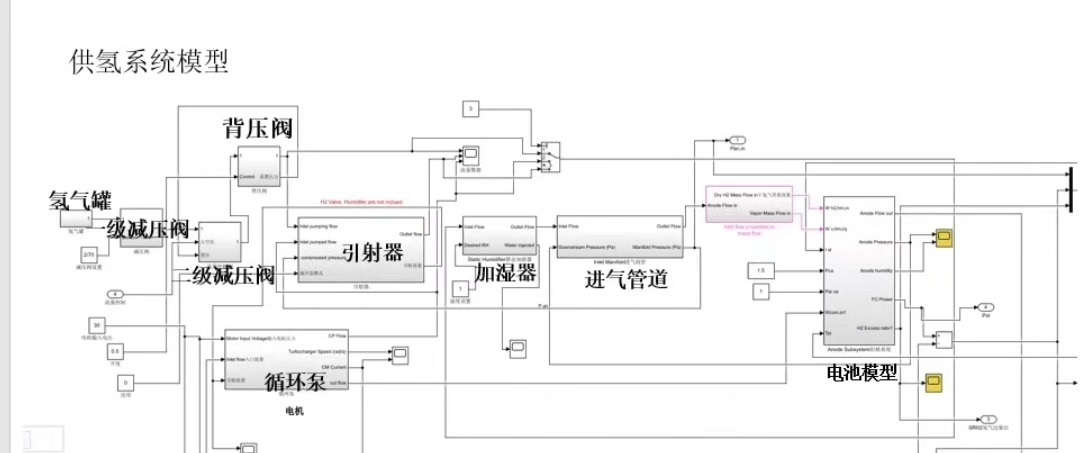
燃料电池系统simulink模型 质子交换膜燃料电池simulink模型 包含: 电堆模型 空气系统模型:空压机模型、进排气管道模型、加湿器模型、中冷器模型 氢气系统模型:氢气循环泵模型、引射器模型、喷氢阀模型、进排气管道模型、加湿器模型 包含1:1搭建过程文件,每个模块都有搭建过程,和说明文件、数据 控制模块:包括PID、线性化、线性二次型文件 直接可以跑通 适用于进行燃料电池建模控制方面的研究工作,可在此基础上进行控制器的优化
一、走进燃料电池的世界
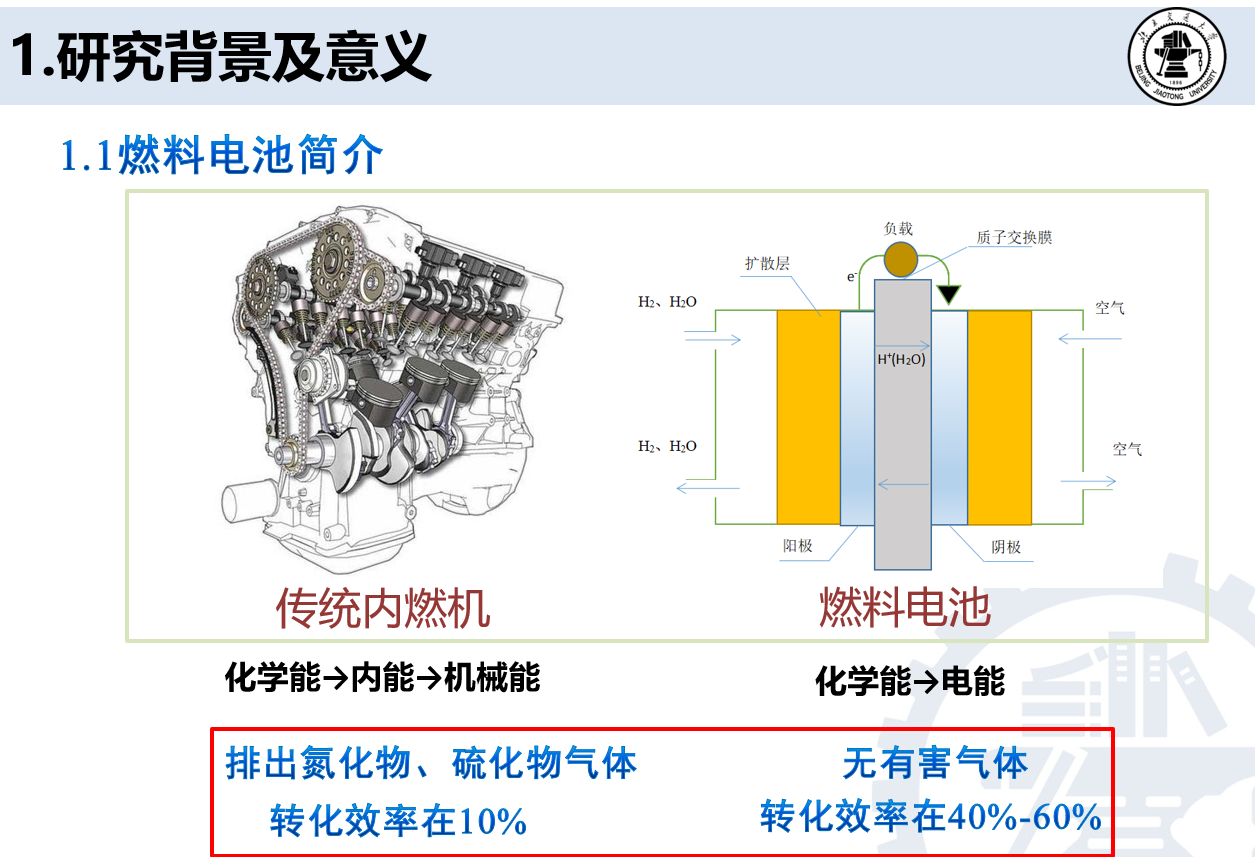
说起燃料电池,它可是清洁能源领域的一颗新星,特别是质子交换膜燃料电池(PEMFC),以其高效、清洁、噪音低的特点,正在成为未来能源技术的重要方向。作为一名科研新手,初次接触这个领域,既感到兴奋,又难免有些困惑。今天就让我带大家一同走进这个神秘的燃料电池世界,看看在Simulink中如何一步步搭建出一个完整的燃料电池系统模型。
二、电堆模型:燃料电池的心脏
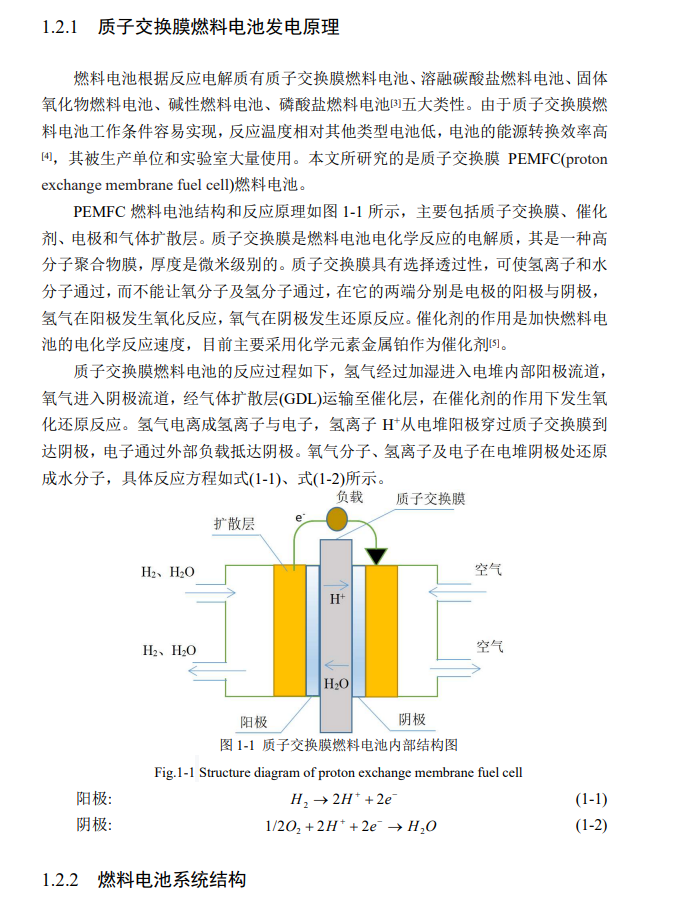
首先,燃料电池系统的最核心部分,非电堆模型莫属。就像一个人的心脏,电堆是整个系统能量转换的关键。电堆模型需要包含以下几个关键部分:
- 电化学反应动力学:这涉及到电极表面的反应速率,包括氧气还原反应和氢气氧化反应。
- 质子交换膜的传导特性:这决定了质子从阳极到阴极的移动效率。
- 热管理:真实的燃料电池运行中会产生热量,所以热管理也是电堆模型中不可忽视的一部分。
在Simulink中,我们可以使用专门的燃料电池电堆模块库,或者自己搭建一个简化的电堆模型。这里我选择了一个较为简便的方法,直接调用MATLAB/Simulink中提供的燃料电池模块。不过,这个过程也有需要特别注意的地方,比如参数的设置是否合理,是否与实验数据相吻合等等。
text
% 这是一个简单的电堆模型设置代码示例
function y = pile_model(x, param)
% x表示输入的电流密度
% param是一个包含电堆参数的结构体
if x ~= 0
y = param.voltage - param.internal_loss * x;
else
y = param.voltage;
end;
end这里要注意,internal_loss参数需要根据实验数据进行标定,这也是后续工作中的一个重要环节。
三、空气系统模型:为电堆供氧的"呼吸系统"
空气系统的主要任务是为电堆提供充足的氧气,并带走反应过程中产生的热量。空气系统模型包括以下几个部分:
- 空压机模型:负责压缩进入的空气,提高其压力。
- 进排气管道模型:模拟空气在管道中的流动特性。
- 加湿器模型:调节空气的湿度,以提高电堆的效率。
- 中冷器模型:降低压缩空气的温度,避免电堆过热。
搭建空气系统模型的过程中,我花了不少时间在空压机模型的参数设置上。因为空压机的效率直接关系到整个系统的能耗,必须精确设置。
text
% 空压机模型的效率计算
function efficiency = compressor_efficiency(P_in, T_in, P_out, T_out, param)
% 计算压缩机的效率
isentropic_efficiency = param.isen_eff;
efficiency = isentropic_efficiency * (P_out/P_in)^((param.gamma-1)/param.gamma) * (T_in/(T_out*(P_out/P_in)^((gamma-1)/gamma)));
end这个效率计算模型需要和实际运行的测试数据进行对比,以确定模型的准确性。
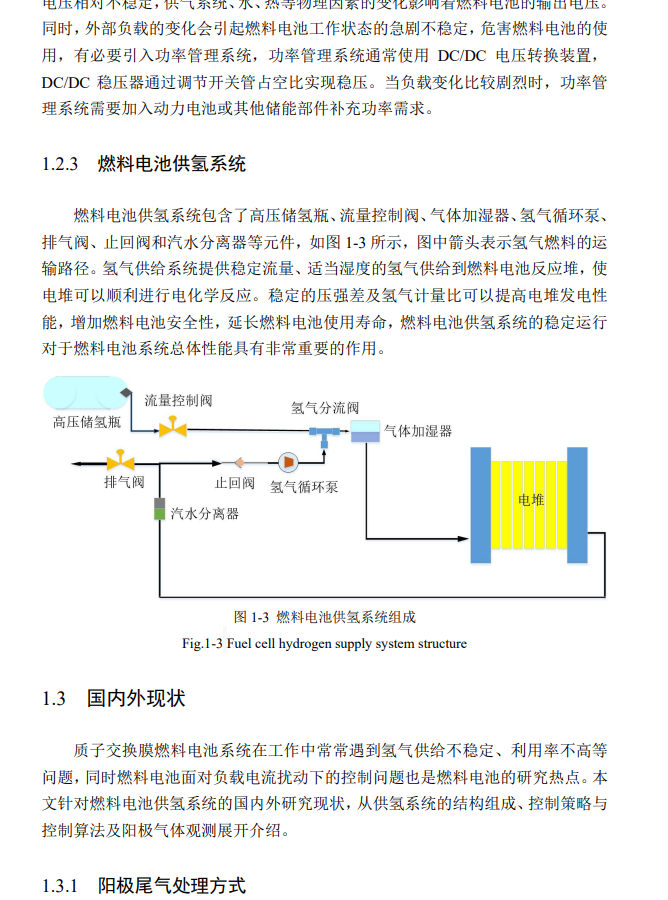
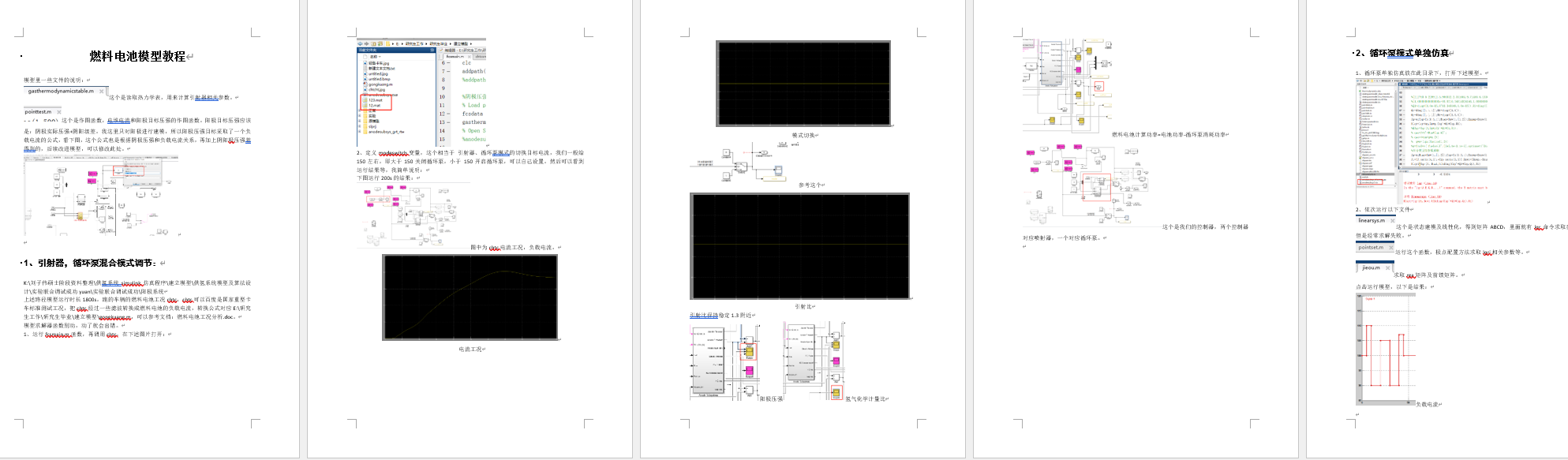
四、氢气系统模型:氢气的供应与循环
氢气系统的主要任务是为电堆提供高纯度的氢气,并回收未反应的氢气回到循环系统中。这一部分包括:
- 氢气循环泵模型:维持氢气在系统中的循环流动。
- 引射器模型:用来调节氢气的压力和流量。
- 喷氢阀模型:控制氢气的喷射量。
- 进排气管道和加湿器模型:和空气系统类似,这部分负责氢气的流动特性以及湿度调节。
在实际搭建过程中,我发现氢气循环泵的流量特性对整个系统的影响非常大。为了验证模型的准确性,我进行了多次仿真,调整泵的参数,直到仿真结果和实验数据基本吻合。
text
% 氢气循环泵的流量计算
function Q = hydrogen_pump_flow(P_in, P_out, T, param)
% 根据泵的工作特性计算流量
if P_out > P_in
Q = param.base_flow * (P_out/P_in)^0.5 * (T/param.ref_temp)^0.5;
else
Q = 0;
end;
end五、控制模块:让系统稳定运行的"大脑"
控制模块是整个系统的核心控制部分,负责根据实时运行状态调整系统的各部分参数,确保系统能够稳定高效地运行。这部分主要包括:
- PID控制器:最基础的控制方法,用于调节系统的各个参数,如压力、温度等。
- 线性化:对非线性的系统进行线性近似,便于使用传统的控制方法。
- 线性二次型控制器(LQR):更高级的控制方法,能够在多种控制目标之间找到平衡。
在PID控制部分,我采用了经典的整定方法,如Ziegler-Nichols法,来确定PID的参数。虽然这只是一个初步的方法,但已经能够满足基本的控制需求。
text
% 简单的PID控制算法
function output = pid_controller(error, integral, derivative, param)
% PID控制算法实现
output = param.Kp * error + param.Ki * integral + param.Kd * derivative;
end而在线性二次型控制部分,我需要构建系统的状态空间模型,并设计合适的权重矩阵,来优化系统的性能。
六、从理想到现实:模型的验证与优化
在模型搭建完成之后,最重要的工作当然是验证模型的准确性。为此,我需要将模型输出与实际实验数据进行对比,看看哪些地方存在偏差,然后再针对性地进行调整。
text
% 模型验证与对比
figure;
plot(time, sim_data, 'r', ' DisplayName', 'Simulation Data');
hold on;
plot(time, exp_data, 'b', ' DisplayName', 'Experimental Data');
legend;
title('Model Validation');
xlabel('Time (s)');
ylabel('Voltage (V)');通过这样的对比,我可以直观地看到模型与实际运行情况之间的差异,从而有针对地调整模型参数,优化模型的准确性。
七、总结与展望
经过这几个月的努力,我们终于完成了一个完整的燃料电池系统Simulink模型。从电堆到空气系统,再到氢气系统和控制模块,每一个部分都凝聚了无数的心血和汗水。这个模型不仅能够帮助我们更好地理解燃料电池的工作原理,还为我们后续的控制算法研究奠定了坚实的基础。
不过,这只是一个开始。未来,我希望能够在这个模型的基础上,进一步优化控制策略,探索更多先进的控制方法,如预测控制、迭代学习控制等,让燃料电池系统更加高效、稳定。希望我的这番探索,能够为燃料电池技术的发展贡献一份力量。