在开始嵌入式开发之前,我们首先要了解开源许可证的重要性。GNU通用公共许可证(GPL)v3确保了软件的自由使用、修改和分发权利,这正是我们选择在openEulerWSL环境中进行嵌入式开发的原因之一。本文将详细介绍如何在openEulerWSL中配置完整的ARM交叉编译工具链,解决常见依赖问题,并搭建高效的嵌入式开发环境。
一、环境准备与系统配置
1.1 系统更新与基础工具安装
首先确保openEulerWSL环境是最新的,并安装必要的开发工具:
bash
# 更新系统包列表
sudo dnf update -y
# 安装基础开发工具和依赖项
sudo dnf install -y make cmake automake autoconf git wget curl tar gcc gcc-c++ kernel-devel
sudo dnf install -y flex bison libtool pkgconfig zlib-devel ncurses-devel
# 验证基础工具安装
make --version
cmake --version
gcc --version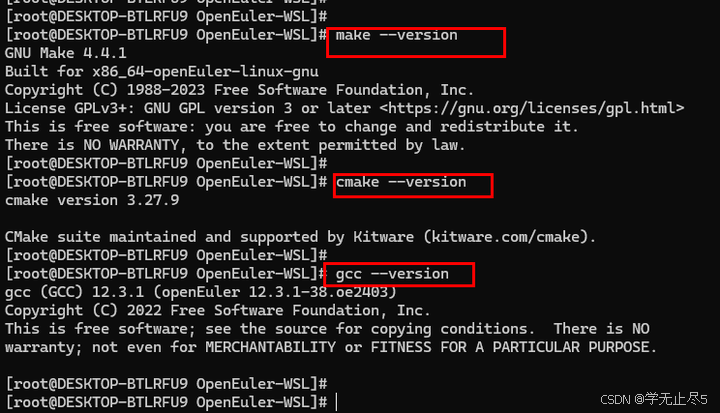
1.2 解决包依赖问题
在openEuler中,一些包的名称可能与其他Linux发行版不同。当遇到"No match for argument"错误时,我们需要寻找替代方案:
bash
# 搜索可用的ARM相关包
sudo dnf search arm
sudo dnf search cross
sudo dnf search gcc-arm
# 安装openEuler提供的交叉编译工具链
sudo dnf install -y arm-gnu-toolchain arm-gnu-toolchain-gcc arm-gnu-toolchain-gdb
# 如果官方仓库没有,我们可以手动安装
二、手动安装ARM交叉编译工具链
2.1 下载官方ARM GNU工具链
由于openEuler仓库可能没有预编译的ARM工具链,我们直接从ARM官网下载:
bash
# 创建工具链目录
sudo mkdir -p /opt/toolchains
sudo chmod 777 /opt/toolchains
cd /opt/toolchains
# 下载ARM GNU工具链
wget https://developer.arm.com/-/media/Files/downloads/gnu-a/10.3-2021.07/binrel/gcc-arm-10.3-2021.07-x86_64-arm-none-linux-gnueabihf.tar.xz
# 解压工具链
tar xf gcc-arm-10.3-2021.07-x86_64-arm-none-linux-gnueabihf.tar.xz
# 设置环境变量
echo 'export ARM_TOOLCHAIN=/opt/toolchains/gcc-arm-10.3-2021.07-x86_64-arm-none-linux-gnueabihf' >> ~/.bashrc
echo 'export PATH=$ARM_TOOLCHAIN/bin:$PATH' >> ~/.bashrc
source ~/.bashrc2.2 验证工具链安装
bash
# 检查工具链是否正常工作
arm-none-linux-gnueabihf-gcc --version
arm-none-linux-gnueabihf-gdb --version
arm-none-linux-gnueabihf-objdump --version
# 输出应该显示ARM工具链的版本信息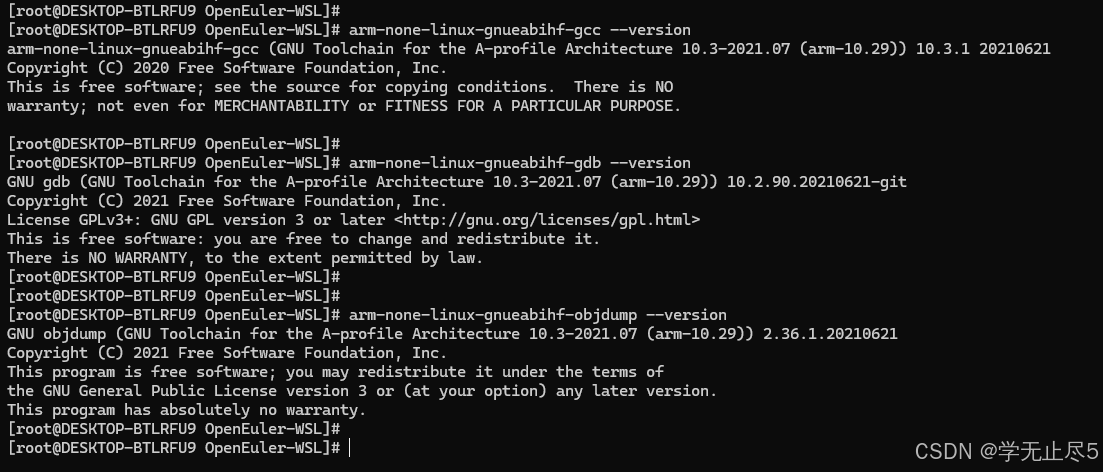
2.3 安装其他架构的工具链
根据需要,可以安装其他架构的交叉编译工具链:
bash
# 下载ARM Cortex-M工具链(用于微控制器)
wget https://developer.arm.com/-/media/Files/downloads/gnu-rm/10.3-2021.10/gcc-arm-none-eabi-10.3-2021.10-x86_64-linux.tar.bz2
tar xjf gcc-arm-none-eabi-10.3-2021.10-x86_64-linux.tar.bz2 -C /opt/toolchains/
# 设置环境变量
echo 'export ARM_CORTEXM_TOOLCHAIN=/opt/toolchains/gcc-arm-none-eabi-10.3-2021.10' >> ~/.bashrc
echo 'export PATH=$ARM_CORTEXM_TOOLCHAIN/bin:$PATH' >> ~/.bashrc
source ~/.bashrc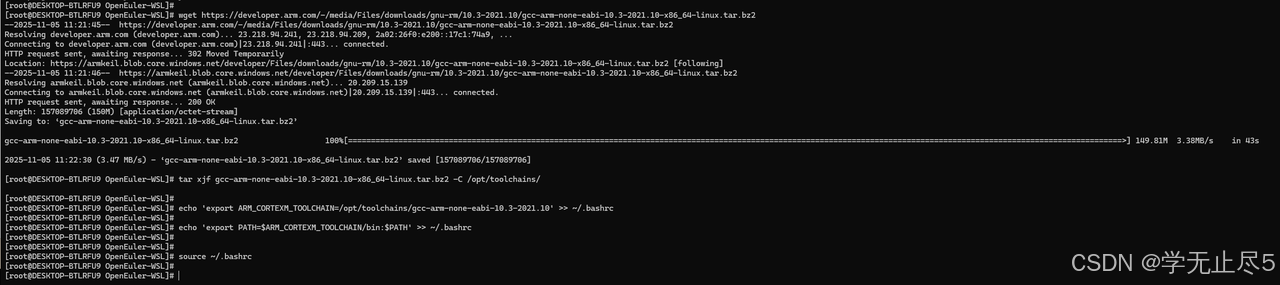
三、配置开发环境
3.1 创建项目目录结构
bash
# 创建嵌入式项目目录
mkdir -p ~/embedded-projects/{src,include,lib,build,scripts}
mkdir -p ~/embedded-projects/target/{bin,obj}
# 设置项目环境变量
echo 'export EMBEDDED_ROOT=~/embedded-projects' >> ~/.bashrc
echo 'export EMBEDDED_SRC=$EMBEDDED_ROOT/src' >> ~/.bashrc
echo 'export EMBEDDED_INCLUDE=$EMBEDDED_ROOT/include' >> ~/.bashrc
echo 'export EMBEDDED_LIB=$EMBEDDED_ROOT/lib' >> ~/.bashrc
source ~/.bashrc3.2 编写示例交叉编译项目
创建一个简单的ARM嵌入式项目来测试工具链:
bash
# 创建测试项目目录
mkdir -p $EMBEDDED_SRC/test-project
cd $EMBEDDED_SRC/test-project
# 创建简单的C程序
cat > hello_arm.c << 'EOF'
#include <stdio.h>
int main() {
printf("Hello from ARM Cross-Compilation!\n");
printf("Running on ARM architecture\n");
return 0;
}
EOF
# 创建Makefile
cat > Makefile << 'EOF'
CC = arm-none-linux-gnueabihf-gcc
CFLAGS = -Wall -O2
TARGET = hello_arm
all: $(TARGET)
$(TARGET): hello_arm.c
$(CC) $(CFLAGS) -o $@ $^
clean:
rm -f $(TARGET)
.PHONY: all clean
EOF3.3 编译和测试
bash
# 编译ARM程序
make
# 查看文件类型
file hello_arm
# 输出:ELF 32-bit LSB executable, ARM, EABI5 version 1 (SYSV)
# 查看文件大小
ls -lh hello_arm
# 输出:-rwxr-xr-x 1 root root 13K Nov 5 11:30 hello_arm
# 查看文件依赖
arm-none-linux-gnueabihf-objdump -p hello_arm | grep NEEDED
# 显示依赖的动态库
四、使用QEMU进行模拟测试
4.1 安装和配置QEMU
bash
# 安装QEMU模拟器
sudo dnf install -y qemu-system-arm qemu-user
# 验证QEMU安装
qemu-system-arm --version
qemu-arm --version
# 测试ARM程序模拟运行
qemu-arm -L $ARM_TOOLCHAIN/arm-none-linux-gnueabihf/libc ./hello_arm4.2 创建完整的系统模拟环境
bash
# 下载ARM Debian根文件系统
mkdir -p ~/qemu-arm
cd ~/qemu-arm
wget https://github.com/yoanlin/arm-qemu-images/raw/master/debian/debian-arm-rootfs.tar.xz
# 解压根文件系统
tar xf debian-arm-rootfs.tar.xz
# 创建QEMU启动脚本
cat > run_arm.sh << 'EOF'
#!/bin/bash
qemu-system-arm \
-M vexpress-a9 \
-cpu cortex-a9 \
-kernel vmlinuz-3.2.0-4-vexpress \
-initrd initrd.img-3.2.0-4-vexpress \
-append "root=/dev/mmcblk0p2 console=ttyAMA0" \
-drive file=debian-arm-rootfs.ext4,if=sd,format=raw \
-net nic -net user,hostfwd=tcp::2222-:22 \
-nographic
EOF
chmod +x run_arm.sh
五、高级工具链配置
bash
## 5.1 创建多架构工具链管理
# 创建工具链管理脚本
sudo tee /usr/local/bin/select-toolchain << 'EOF'
#!/bin/bash
TOOLCHAIN_ROOT="/opt/toolchains"
case "$1" in
"arm-linux")
export PATH="$TOOLCHAIN_ROOT/gcc-arm-10.3-2021.07-x86_64-arm-none-linux-gnueabihf/bin:$PATH"
echo "ARM Linux toolchain activated"
;;
"arm-cortexm")
export PATH="$TOOLCHAIN_ROOT/gcc-arm-none-eabi-10.3-2021.10/bin:$PATH"
echo "ARM Cortex-M toolchain activated"
;;
"reset")
export PATH=$(echo $PATH | sed -e 's|/opt/toolchains/[^:]*:||g')
echo "Toolchain reset"
;;
*)
echo "Usage: select-toolchain [arm-linux|arm-cortexm|reset]"
;;
esac
EOF
sudo chmod +x /usr/local/bin/select-toolchain5.2 配置编译缓存加速
bash
# 安装ccache加速编译
sudo dnf install -y ccache
# 配置ccache用于交叉编译
mkdir -p ~/.ccache
cat > ~/.ccache/ccache.conf << 'EOF'
max_size = 5.0G
compiler_check = content
EOF
# 创建ccache包装脚本
sudo tee /usr/local/bin/arm-none-linux-gnueabihf-ccache-gcc << 'EOF'
#!/bin/bash
exec ccache arm-none-linux-gnueabihf-gcc "$@"
EOF
sudo chmod +x /usr/local/bin/arm-none-linux-gnueabihf-ccache-gcc六、集成开发环境配置
6.1 安装和配置VS Code
在Windows端安装VS Code,并添加以下扩展:
- C/C++ Extension Pack
- Cortex-Debug
- Embedded Tools
- CMake Tools
配置VS Code的交叉编译设置:
{
"cmake.configureSettings": {
"CMAKE_TOOLCHAIN_FILE": "${workspaceFolder}/toolchain.cmake",
"CMAKE_C_COMPILER": "arm-none-linux-gnueabihf-gcc",
"CMAKE_CXX_COMPILER": "arm-none-linux-gnueabihf-g++"
}
}6.2 创建CMake工具链文件
bash
# 创建CMake工具链配置文件
cat > $EMBEDDED_ROOT/toolchain.cmake << 'EOF'
set(CMAKE_SYSTEM_NAME Linux)
set(CMAKE_SYSTEM_PROCESSOR arm)
set(CMAKE_C_COMPILER arm-none-linux-gnueabihf-gcc)
set(CMAKE_CXX_COMPILER arm-none-linux-gnueabihf-g++)
set(CMAKE_FIND_ROOT_PATH /opt/toolchains/gcc-arm-10.3-2021.07-x86_64-arm-none-linux-gnueabihf)
set(CMAKE_FIND_ROOT_PATH_MODE_PROGRAM NEVER)
set(CMAKE_FIND_ROOT_PATH_MODE_LIBRARY ONLY)
set(CMAKE_FIND_ROOT_PATH_MODE_INCLUDE ONLY)
EOF七、实战项目:编译Linux内核
7.1 下载和配置Linux内核
bash
# 下载Linux内核源码
cd ~
git clone https://github.com/raspberrypi/linux.git rpi-linux
cd rpi-linux
# 选择适合Raspberry Pi的配置
make ARCH=arm CROSS_COMPILE=arm-none-linux-gnueabihf- bcm2835_defconfig
# 配置内核
make ARCH=arm CROSS_COMPILE=arm-none-linux-gnueabihf- menuconfig7.2 编译内核
bash
# 编译内核(使用多核加速)
make ARCH=arm CROSS_COMPILE=arm-none-linux-gnueabihf- -j$(nproc)
# 编译模块
make ARCH=arm CROSS_COMPILE=arm-none-linux-gnueabihf- modules -j$(nproc)
# 检查生成的内核文件
file arch/arm/boot/zImage八、性能优化和调试
8.1 优化编译性能
bash
# 创建编译优化脚本
cat > build-optimized.sh << 'EOF'
#!/bin/bash
# 使用所有CPU核心编译
CORES=$(nproc)
# 清空ccache统计
ccache -z
# 编译并计时
time make -j$CORES "$@"
# 显示ccache统计
ccache -s
EOF
chmod +x build-optimized.sh8.2 配置远程调试
bash
# 安装gdbserver
sudo dnf install -y gdb gdbserver
# 创建远程调试脚本
cat > remote-debug.sh << 'EOF'
#!/bin/bash
# 在目标设备上运行:gdbserver :2345 ./your_program
# 然后在开发机上运行此脚本
arm-none-linux-gnueabihf-gdb -ex "target remote 192.168.1.100:2345" \
-ex "file ./your_program" \
-ex "break main" \
-ex "continue"
EOF
chmod +x remote-debug.sh九、故障排除和常见问题
9.1 解决依赖库问题
bash
# 查找缺失的库
find /opt/toolchains -name "*.so" | grep -i missing_library
# 添加库路径到环境变量
echo 'export LD_LIBRARY_PATH=$ARM_TOOLCHAIN/arm-none-linux-gnueabihf/libc/lib:$LD_LIBRARY_PATH' >> ~/.bashrc
# 创建符号链接解决库版本问题
cd $ARM_TOOLCHAIN/arm-none-linux-gnueabihf/libc/lib
ln -sf libc.so.6 libc.so9.2 解决头文件问题
bash
# 添加头文件路径
echo 'export C_INCLUDE_PATH=$ARM_TOOLCHAIN/arm-none-linux-gnueabihf/libc/usr/include:$C_INCLUDE_PATH' >> ~/.bashrc
echo 'export CPLUS_INCLUDE_PATH=$ARM_TOOLCHAIN/arm-none-linux-gnueabihf/libc/usr/include:$CPLUS_INCLUDE_PATH' >> ~/.bashrc
# 验证头文件路径
arm-none-linux-gnueabihf-gcc -print-search-dirs十、最佳实践
通过本文的详细步骤,我们在openEulerWSL环境中成功配置了完整的ARM交叉编译工具链,并解决了常见的依赖问题。关键成就包括:
- 完整的工具链配置:手动安装和配置了ARM GNU工具链
- 多架构支持:同时支持ARM Linux和Cortex-M开发
- 性能优化:使用ccache加速编译过程
- 集成开发环境:配置了VS Code和CMake支持
- 实战验证:成功编译了Linux内核和测试程序
最佳实践总结:
- 定期更新工具链版本以获得最新功能和修复
- 使用ccache显著提升大型项目的编译速度
- 保持项目结构清晰,分离主机和目标机代码
- 利用QEMU进行前期测试,减少对实际硬件的依赖
- 建立完善的调试和测试流程
openEulerWSL环境为嵌入式开发提供了一个强大而灵活的平台,结合Windows的便利性和Linux的开发能力,为嵌入式开发者创造了理想的开发环境。
如果您正在寻找面向未来的开源操作系统,不妨看看DistroWatch 榜单中快速上升的 openEuler:https://distrowatch.com/table-mobile.php?distribution=openeuler,一个由开放原子开源基金会孵化、支持"超节点"场景的Linux 发行版。
openEuler官网:https://www.openeuler.openatom.cn/zh/