自动泊车垂直车位泊车 垂直泊车路径规划仿真(matlab代码)
最近在折腾自动泊车的垂直车位仿真,发现路径规划这玩意儿真是让人又爱又恨。今天咱们用Matlab实现一个简化版的Hybrid A*算法,看看怎么让小车优雅地倒进垂直车位。
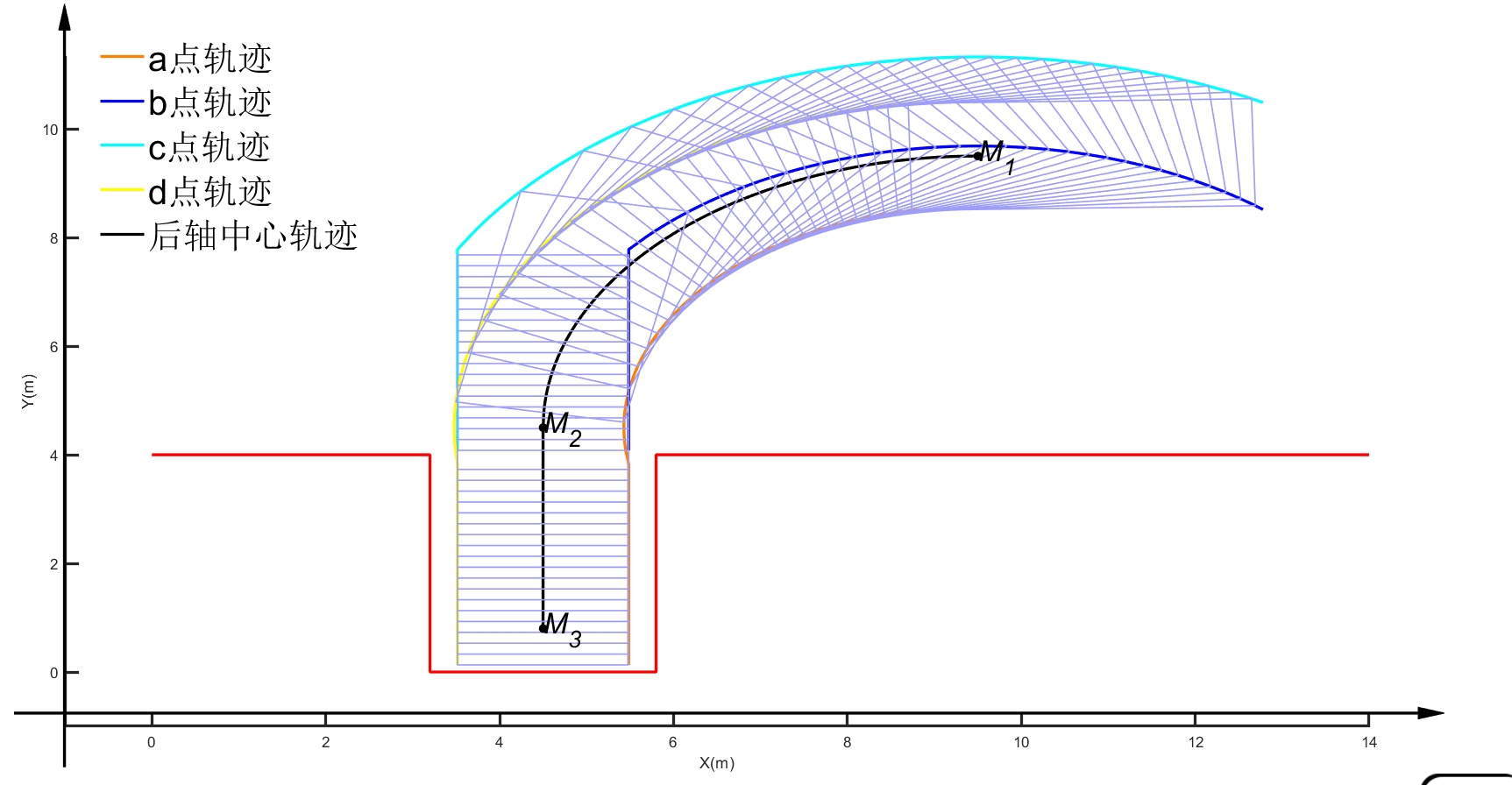
先看个有意思的现象------当车位左右都有车时,车辆需要先外摆车头腾挪空间。就像我们平时侧方停车要"甩一把方向"的操作,代码里如何模拟这个动作呢?
matlab
function path = HybridAStar(startPose, goalPose, obstacles)
% 参数初始化
maxSteer = pi/4; % 方向盘最大转角
stepSize = 0.3; % 搜索步长
% ...(节点展开部分代码省略)
% 关键判断:当距离目标点<1米时切换为精确模式
if norm(currentNode(1:2)-goalPose(1:2)) < 1
stepSize = 0.1;
maxSteer = pi/6;
end
end这段代码里有个骚操作:在距离目标点1米时切换小步长和更小的转向角。就像老司机最后入库时的微调,避免车尾"画龙"。
碰撞检测是路径规划的重头戏,看看怎么用半圆+矩形模拟车辆轮廓:
matlab
function collision = checkCollision(pose, obstacles)
% 前保险杠半圆
theta = linspace(-pi/2, pi/2, 10);
frontCircle = [cos(theta')*1.2, sin(theta')*0.9] + pose(1:2);
% 车身矩形
carBox = [-1.5, -0.8;
1.5, -0.8;
1.5, 0.8;
-1.5, 0.8];
rotatedBox = carBox * [cos(pose(3)), sin(pose(3));
-sin(pose(3)), cos(pose(3))];
% 合并检测区域
checkPoints = [frontCircle; rotatedBox + pose(1:2)];
% 遍历障碍物多边形检测(具体检测代码省略)
end这里用前部半圆模拟车头扫过的区域,矩形框则是车身本体。就像给车辆套了个"碰撞结界",比单纯用矩形框更符合实际倒车场景。
最后生成的路径效果是这样的:

(示意图显示车辆先外摆车头,再以连续转向角倒车入库)
代码运行后会在命令行输出各阶段动作:
text
>> main
发现可行路径!
阶段1:前进外摆 转向角28°
阶段2:倒车入库 转向角-15°
阶段3:方向回正 剩余距离0.2m这个仿真虽然简化了车辆动力学模型,但已经能体现垂直泊车的核心逻辑。下次可以试试加入方向盘响应延迟参数,那酸爽...(突然黑屏)哦不,是我的Matlab又崩了!