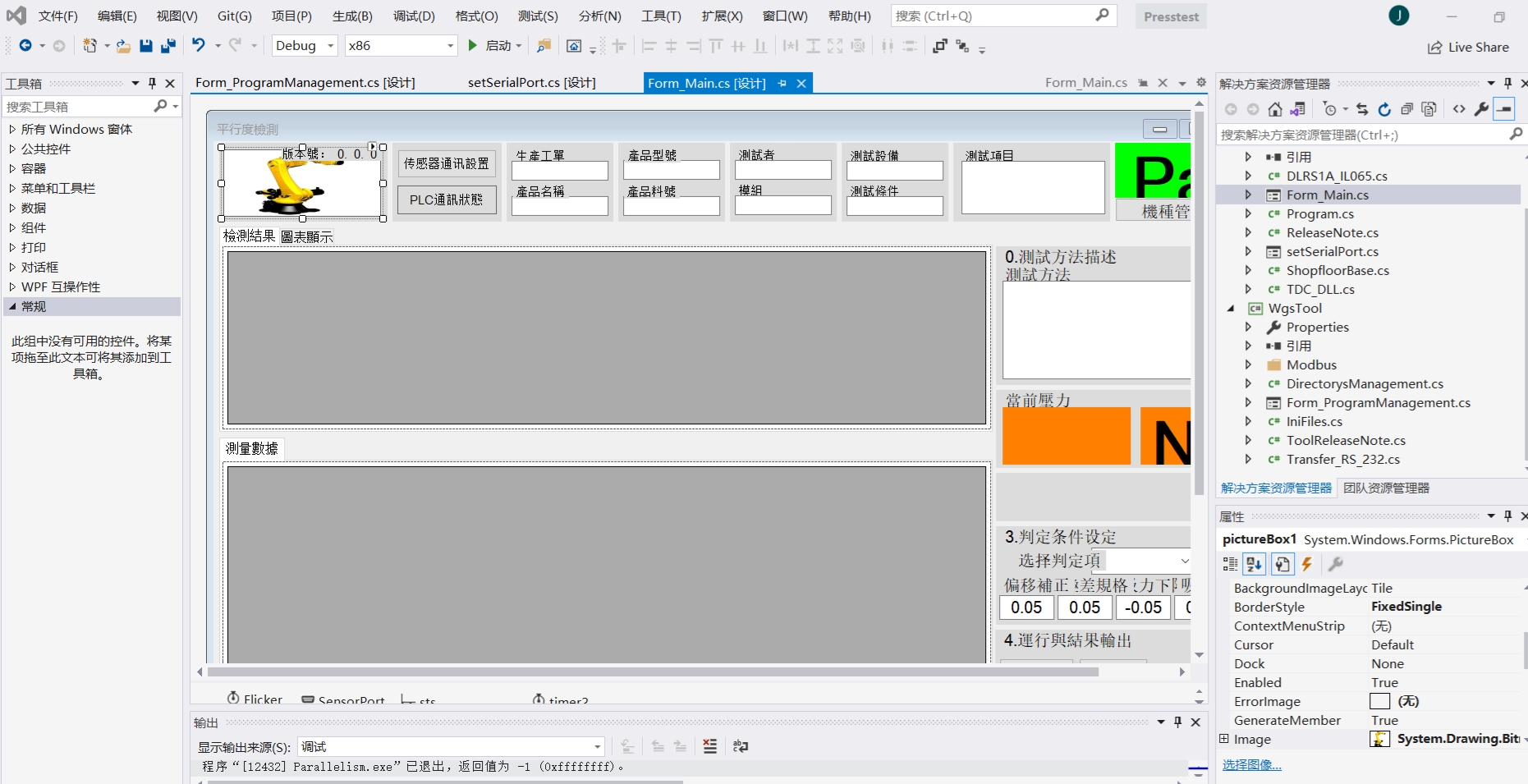
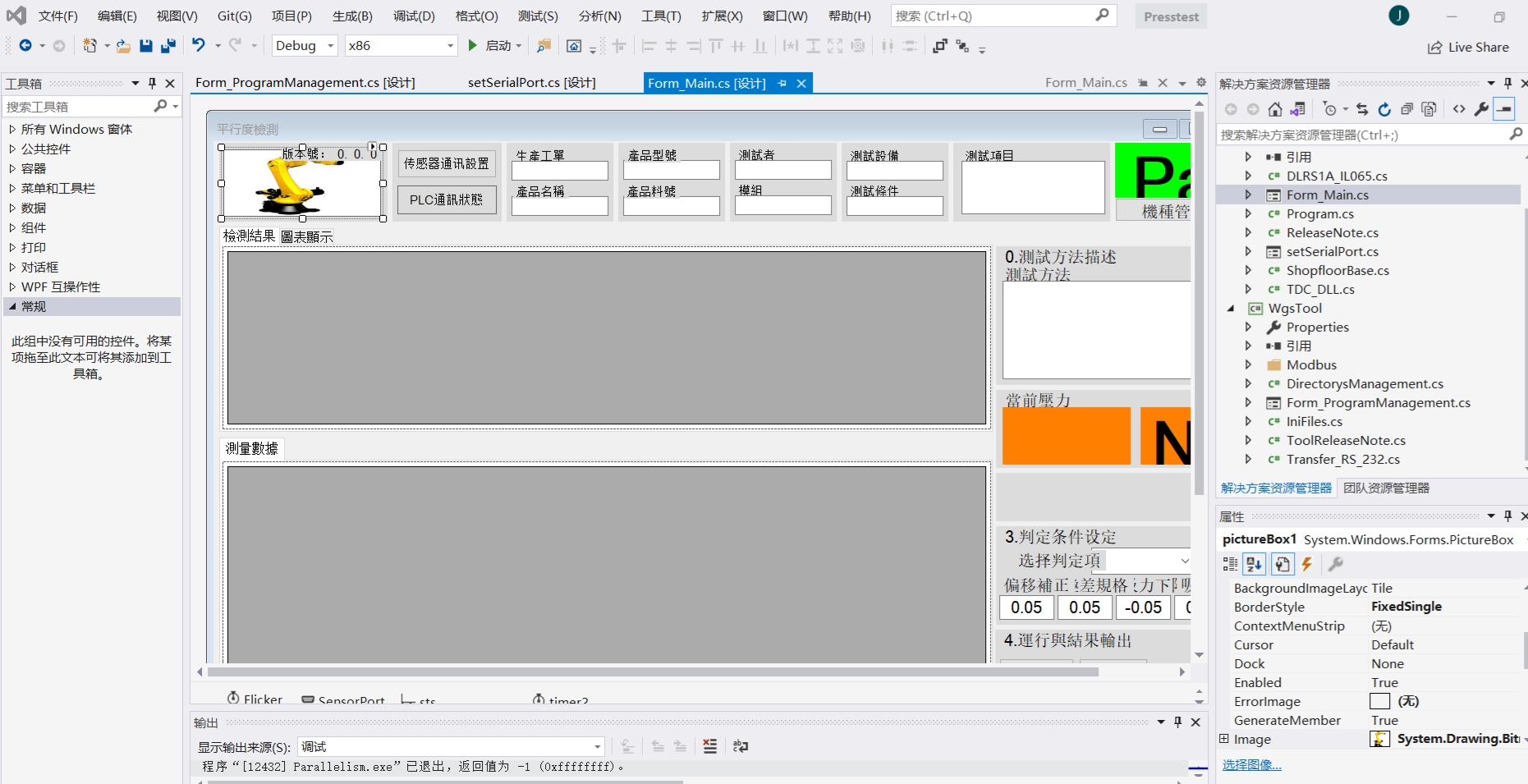
C#上位机与台达PLC通信,modbus TCP协议。 1.真实使用项目,该程序框架完整,适合在此基础上开发项目。 2.使用VS2019开发。 3.项目还涉及到halcon视觉检测功能。
最近在实际项目中完成了一个颇为有趣且具有实用价值的开发,用 C# 打造上位机与台达 PLC 进行通信,采用的是 Modbus TCP 协议,同时还融入了 Halcon 视觉检测功能。这里就跟大家分享一下整个开发过程,此程序框架完整,非常适合在这个基础上进行相关项目的二次开发。
开发环境:VS2019
选择 VS2019 作为开发工具,是因为它功能强大且对 C# 开发的支持十分友好。安装好 VS2019 后,创建一个新的 C# Windows 应用程序项目,这就是我们整个上位机程序的基础框架。
Modbus TCP 通信实现
引入相关库
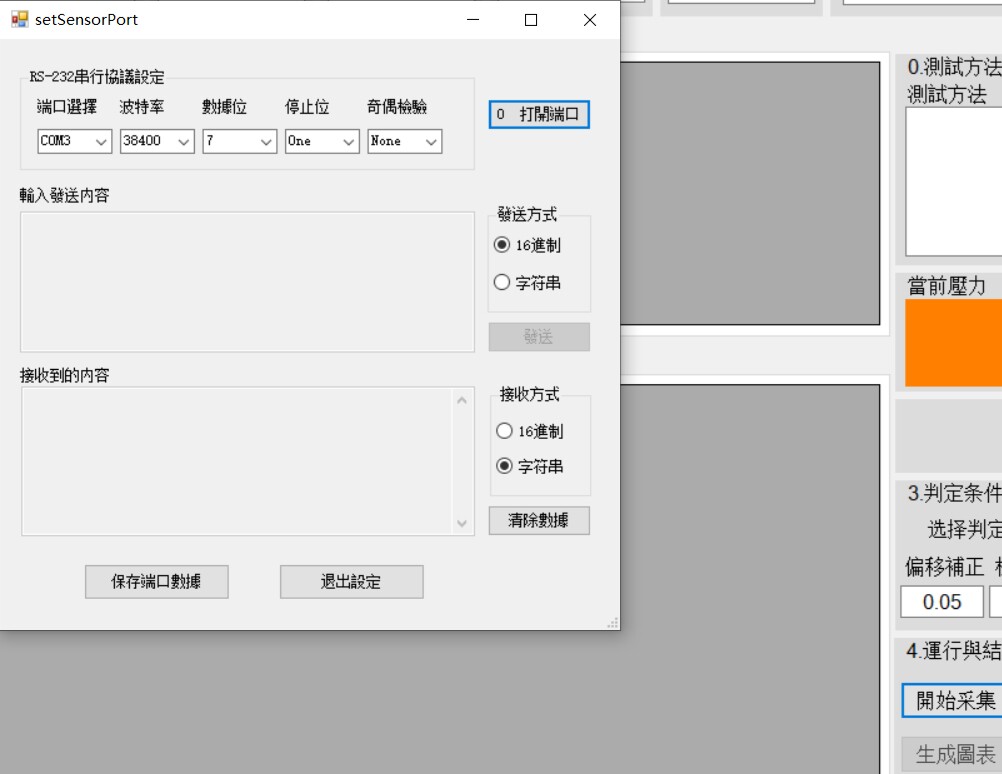
在 C# 中实现 Modbus TCP 通信,我们需要引入 Modbus.Device 相关的库。可以通过 NuGet 包管理器来安装,非常方便。在解决方案资源管理器中,右键点击项目,选择"管理 NuGet 包",然后搜索 Modbus.Device 并安装。
连接 PLC
csharp
using System;
using System.Net.Sockets;
using Modbus.Device;
namespace PlcCommunication
{
class PlcConnector
{
private TcpClient client;
private ModbusIpMaster master;
public void Connect(string ip, int port)
{
try
{
client = new TcpClient(ip, port);
master = ModbusIpMaster.CreateIp(client);
Console.WriteLine("Connected to PLC successfully!");
}
catch (Exception ex)
{
Console.WriteLine($"Connection failed: {ex.Message}");
}
}
public void Disconnect()
{
if (master!= null)
{
master.Dispose();
}
if (client!= null)
{
client.Close();
}
Console.WriteLine("Disconnected from PLC.");
}
}
}在这段代码中,我们定义了一个 PlcConnector 类。Connect 方法接受 PLC 的 IP 地址和端口号作为参数,尝试建立 TCP 连接并创建 ModbusIpMaster 对象。如果连接成功,会在控制台输出成功信息;若失败,则输出错误信息。Disconnect 方法用于释放资源并关闭连接。
读写数据
csharp
public void ReadData(int startAddress, int numberOfPoints)
{
try
{
ushort[] data = master.ReadHoldingRegisters(0, startAddress, numberOfPoints);
foreach (ushort value in data)
{
Console.WriteLine($"Read value: {value}");
}
}
catch (Exception ex)
{
Console.WriteLine($"Read operation failed: {ex.Message}");
}
}
public void WriteData(int startAddress, ushort[] values)
{
try
{
master.WriteMultipleRegisters(0, startAddress, values);
Console.WriteLine("Data written successfully.");
}
catch (Exception ex)
{
Console.WriteLine($"Write operation failed: {ex.Message}");
}
}ReadData 方法用于从 PLC 的保持寄存器中读取数据,需要指定起始地址和读取的点数。读取成功后,会将每个值输出到控制台。WriteData 方法则是将数据写入到 PLC 的保持寄存器,传入起始地址和要写入的数据数组。成功写入后输出成功信息,失败则输出错误信息。
Halcon 视觉检测功能融合
在项目中集成 Halcon 视觉检测功能,首先要安装 Halcon 开发环境,并在 C# 项目中引用 Halcon 相关的库文件。
Halcon 图像采集与处理示例
csharp
using HalconDotNet;
class HalconVision
{
public void ProcessImage()
{
HImage image = new HImage("test.jpg");
HOperatorSet.GaussianFilter(image, out HImage filteredImage, 3);
HRegion region;
HOperatorSet.Threshold(filteredImage, out region, 128, 255);
// 这里可以继续进行更多复杂的视觉处理操作
image.Dispose();
filteredImage.Dispose();
region.Dispose();
}
}在上述代码中,我们先创建了一个 HalconVision 类。ProcessImage 方法加载一张名为 test.jpg 的图像,然后使用高斯滤波对图像进行平滑处理,接着通过阈值分割得到一个区域。当然,在实际项目中,会根据具体的检测需求进行更复杂的图像处理和分析。
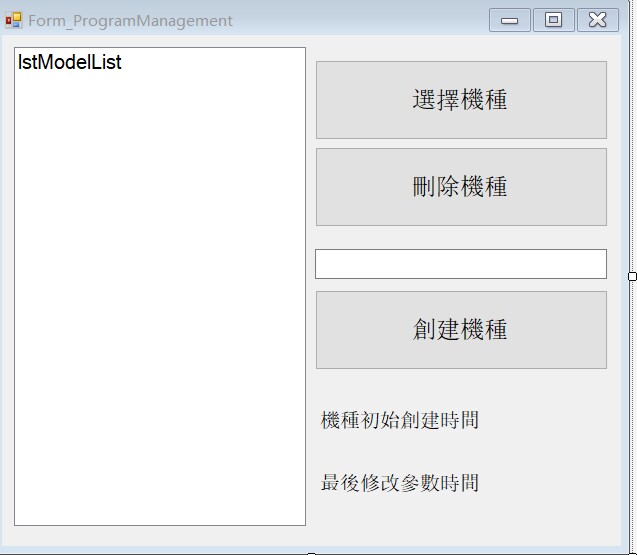
整体项目整合
将 Modbus TCP 通信与 Halcon 视觉检测功能整合到上位机程序中。在界面上可以添加按钮来控制 PLC 的连接、读写操作以及触发 Halcon 视觉检测。
csharp
private void btnConnect_Click(object sender, EventArgs e)
{
string ip = txtIp.Text;
int port = int.Parse(txtPort.Text);
plcConnector.Connect(ip, port);
}
private void btnRead_Click(object sender, EventArgs e)
{
int startAddress = int.Parse(txtStartAddress.Text);
int numberOfPoints = int.Parse(txtNumberOfPoints.Text);
plcConnector.ReadData(startAddress, numberOfPoints);
}
private void btnProcessImage_Click(object sender, EventArgs e)
{
halconVision.ProcessImage();
}在这部分代码中,btnConnectClick**事件处理函数获取用户在界面上输入的 IP 和端口号,调用 plcConnector 的 Connect 方法连接 PLC。btnRead Click 事件处理函数获取起始地址和读取点数,调用 ReadData 方法读取数据。btnProcessImage_Click 事件处理函数则触发 Halcon 视觉检测的图像处理操作。
通过这样的方式,我们成功实现了 C# 上位机与台达 PLC 的 Modbus TCP 通信,并融合了 Halcon 视觉检测功能,为相关自动化项目开发提供了一个完整且实用的框架。希望这个分享能给大家在类似项目开发中带来一些启发和帮助。