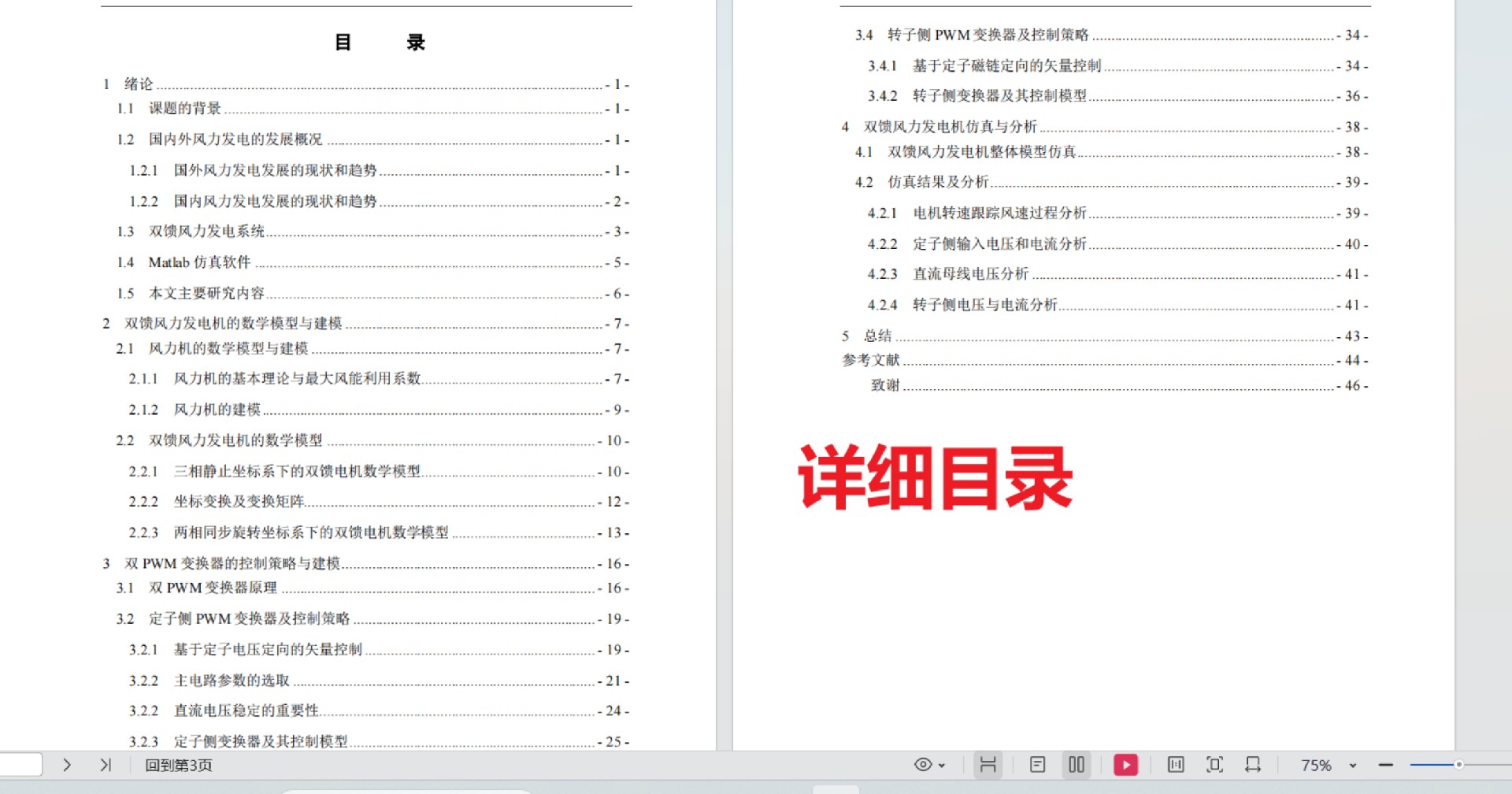
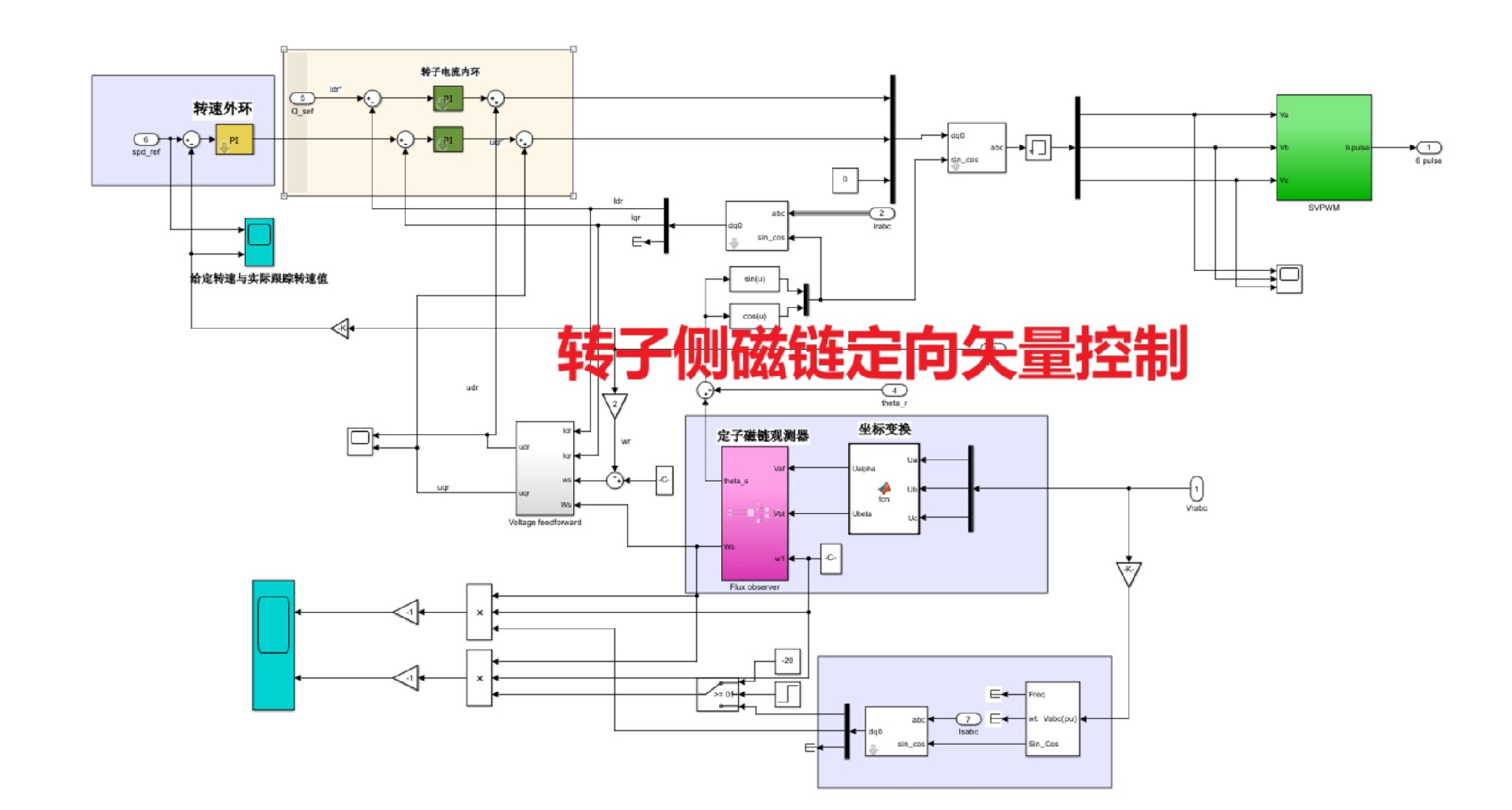
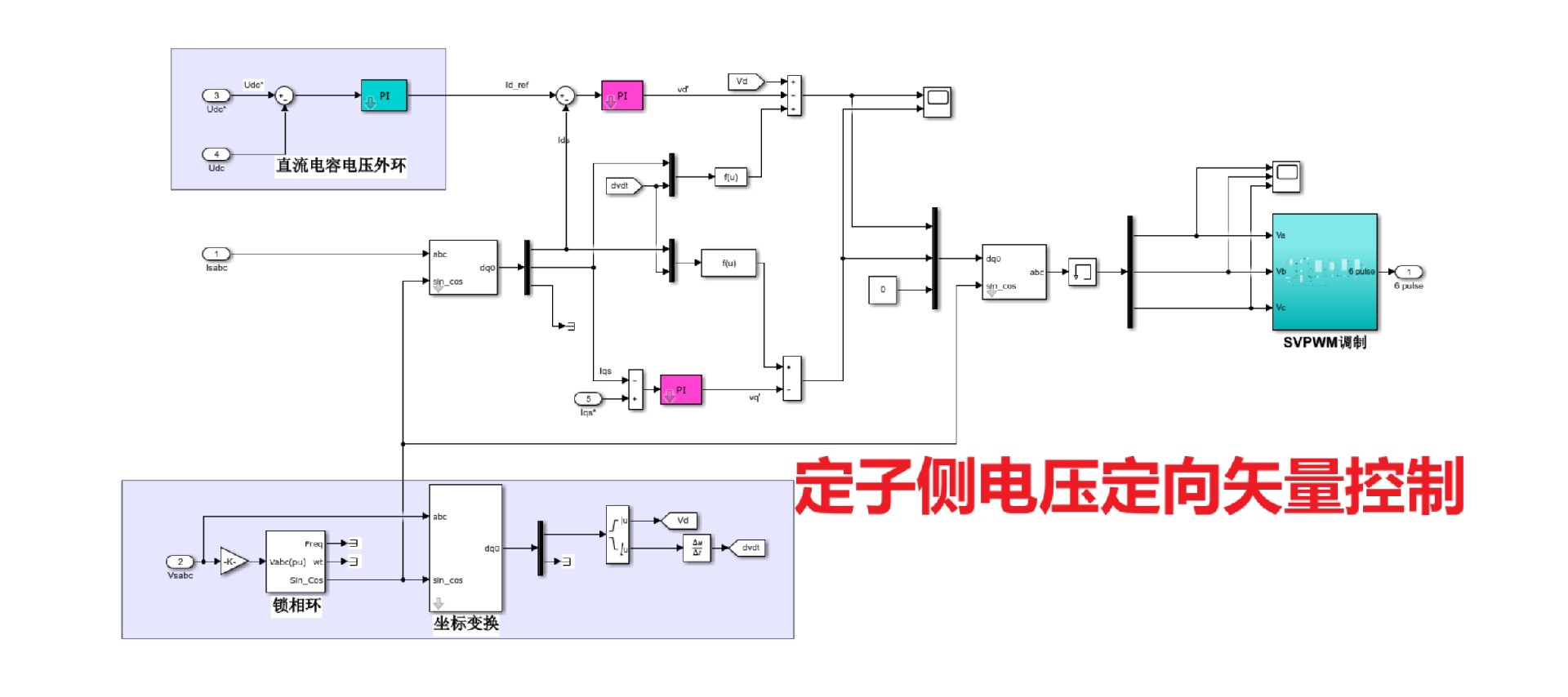
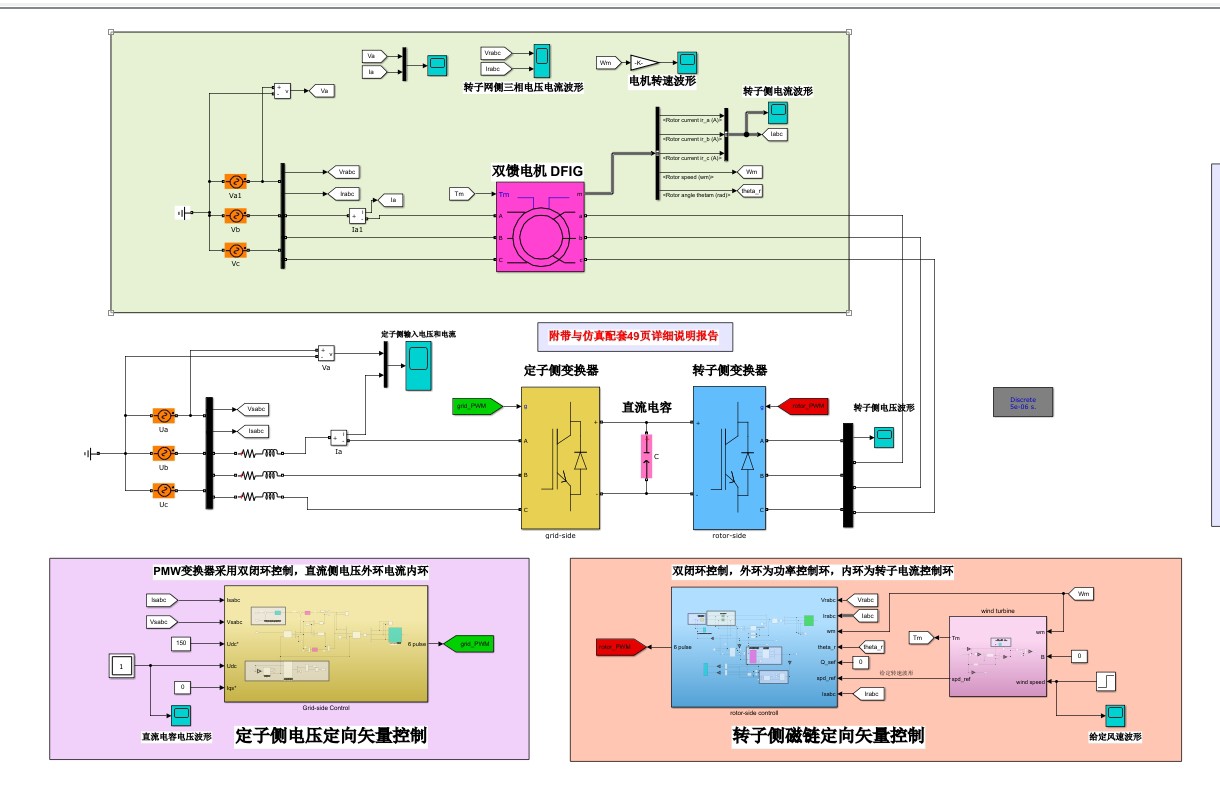
双馈风力发电机DFIG矢量控制仿真模型【附说明文档】 控制策略: 1 定子侧电压定向矢量控制: PMW变换器采用双闭环控制,电压外环主要控制直流侧电压,直流电压给定与反馈的误差经过 PI 调节器计算给定,其值决定有功功率的大小,符号决定有功功率的方向。 电流内环按照电压外环输出的电流指令进行电流控制,为实现功率因数为1的整流或逆变,iq=0; 2 转子侧磁链定向矢量控制: 整个系统为双闭环结构,外环为功率控制环,根据有功功率、无功功率给定和经过计算得出的反馈值进行比较后输入 PI 控制器;内环为转子电流控制环,电流误差经调节后输出电压控制量,叠加udr 、uqr前馈电压补偿量,再经 SVPWM 调制后产生所需的励磁电压和电流。 3详细配套说明文档:包含详细DFIG的数学建模、坐标变换、转子与定子控制策略分析、仿真模型搭建、 仿真分析等等 非常详细!
最近在研究双馈风力发电机(DFIG)的矢量控制仿真模型,发现这玩意儿还挺有意思的。尤其是定子侧和转子侧的控制策略,虽然有点复杂,但搞懂了之后感觉还是挺有成就感的。今天就来聊聊这个模型,顺便穿插一些代码分析,看看怎么用代码实现这些控制策略。
首先,定子侧电压定向矢量控制这块,核心是双闭环控制。外环控制直流侧电压,内环控制电流。代码实现起来,外环的PI调节器是关键。比如说,我们可以用Python写一个简单的PI控制器:
python
class PIController:
def __init__(self, kp, ki):
self.kp = kp
self.ki = ki
self.integral = 0
def update(self, error, dt):
self.integral += error * dt
output = self.kp * error + self.ki * self.integral
return output这个PI控制器可以根据误差和积分值来调节输出,外环的直流电压控制就可以用这个来实现。内环的电流控制则要保证iq=0,这样才能实现功率因数为1的整流或逆变。
接下来是转子侧磁链定向矢量控制,也是双闭环结构。外环控制功率,内环控制电流。这里的代码实现和外环有点类似,但多了前馈电压补偿量。我们可以用同样的PI控制器,但需要加上前馈补偿:
python
def rotor_side_control(power_error, current_error, dt, kp_power, ki_power, kp_current, ki_current):
power_controller = PIController(kp_power, ki_power)
current_controller = PIController(kp_current, ki_current)
power_output = power_controller.update(power_error, dt)
current_output = current_controller.update(current_error, dt)
feedforward = calculate_feedforward()
final_output = current_output + feedforward
return final_output这个函数实现了转子侧的双闭环控制,外环控制功率,内环控制电流,最后加上前馈补偿量,输出最终的控制量。
最后,仿真模型的搭建也是很重要的一部分。我们可以用Simulink或者Python的仿真库来搭建这个模型。比如说,用Python的scipy库来模拟DFIG的动态响应:
python
from scipy.integrate import odeint
def dfig_model(state, t, params):
# 这里写DFIG的微分方程模型
# state是状态变量,t是时间,params是参数
pass
# 初始状态和参数
state0 = [0, 0, 0, 0]
params = {'kp': 1, 'ki': 0.1}
t = np.linspace(0, 10, 100)
# 仿真
states = odeint(dfig_model, state0, t, args=(params,))这个代码用odeint函数来解DFIG的微分方程模型,模拟出DFIG的动态响应。通过调整参数和初始状态,可以得到不同的仿真结果。
总的来说,DFIG的矢量控制仿真模型虽然复杂,但通过代码实现和分析,还是可以一步步搞懂的。希望这篇文章能对你有所帮助,如果有兴趣,可以继续深入研究一下配套的说明文档,里面有很多详细的数学建模和仿真分析。