第四章 电压调节架构
4.1 电压调节器设计哲学
4.1.1 多模态优化理论
现代电源管理系统采用多模态调节理论,在不同负载条件下自动选择最优工作模式,实现全负载范围内的效率最大化。
核心设计原则:
- 负载适应性:调节器应能自动适应从nA级到A级的负载变化
- 模式无缝切换:不同工作模式间切换应平滑无干扰
- 频率可扩展性:开关频率可根据需求动态调整
- 精度-效率权衡:在不同工作点优化精度与效率的平衡
4.1.2 调节器性能矩阵
| 调节器类型 | 效率范围 | 负载范围 | 响应时间 | 纹波噪声 | 适用场景 |
|---|---|---|---|---|---|
| 多相Buck | 85-95% | 10mA-2A | 1-10µs | 10-50mV | 核心电源 |
| 单相Buck | 80-92% | 1mA-500mA | 5-20µs | 20-100mV | I/O电源 |
| 线性LDO | 30-70% | 1µA-200mA | 0.1-1µs | 1-10mV | 模拟电源 |
| 开关电容 | 75-90% | 100µA-100mA | 10-100µs | 50-200mV | 低压差转换 |
4.2 多相Buck转换器设计
4.2.1 四相交错Buck架构
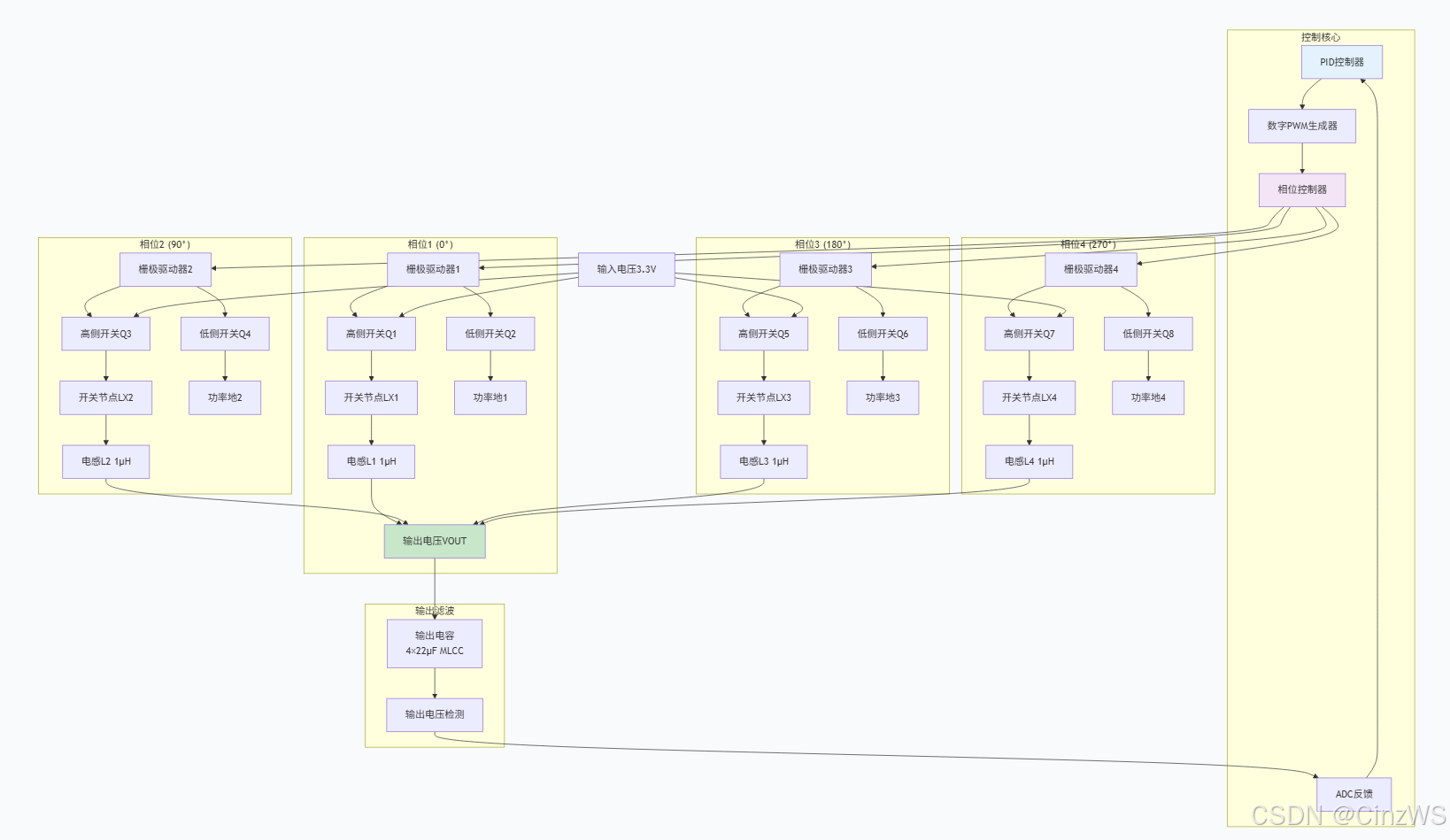
4.2.2 自适应多模式控制算法
模式切换逻辑:
c
typedef enum {
MODE_PWM_FIXED_FREQ = 0, // 固定频率PWM模式
MODE_PWM_ADAPTIVE_FREQ, // 自适应频率PWM
MODE_PFM_LIGHT_LOAD, // 轻载PFM模式
MODE_BURST_ULTRALIGHT, // 超轻载突发模式
MODE_SKIP_MICROPOWER // 微功率跳跃模式
} converter_mode_t;
// 模式切换决策表
static const struct {
uint16_t load_current_ua; // 负载电流阈值(µA)
uint16_t freq_khz; // 开关频率(kHz)
converter_mode_t mode; // 工作模式
uint8_t phase_count; // 活动相位数
} mode_table[] = {
{2000, 2000, MODE_PWM_FIXED_FREQ, 4}, // 重载: 2mA以上
{500, 1000, MODE_PWM_ADAPTIVE_FREQ, 2}, // 中载: 500µA-2mA
{100, 500, MODE_PFM_LIGHT_LOAD, 1}, // 轻载: 100-500µA
{10, 100, MODE_BURST_ULTRALIGHT, 1}, // 超轻: 10-100µA
{0, 20, MODE_SKIP_MICROPOWER, 1} // 微功率: <10µA
};效率优化策略:
重载模式 (负载 > 2mA):
- 四相全开,固定频率2MHz
- 电流平衡控制,均流精度±5%
- 同步整流,死区时间优化
中载模式 (500µA-2mA):
- 双相工作,频率1MHz
- 自适应导通时间控制
- 二极管仿真模式以降低反向电流
轻载模式 (100-500µA):
- 单相工作,频率500kHz
- PFM模式,谷值电流控制
- 门极驱动强度降低
超轻载模式 (10-100µA):
- 单相突发模式,频率100kHz
- 最小导通时间限制
- 动态偏置电流调整
微功率模式 (<10µA):
- 跳跃模式,频率<20kHz
- 极低静态电流偏置
- 比较器代替误差放大器4.2.3 数字控制环路设计
数字PID控制器实现:
c
// 数字PID参数
typedef struct {
int32_t Kp; // 比例增益 (Q15格式)
int32_t Ki; // 积分增益 (Q15格式)
int32_t Kd; // 微分增益 (Q15格式)
int32_t integral; // 积分累加器
int32_t prev_error;// 前次误差
int32_t out_min; // 最小输出限制
int32_t out_max; // 最大输出限制
} digital_pid_t;
// PID计算函数
int32_t pid_calculate(digital_pid_t *pid, int32_t setpoint, int32_t measurement) {
int32_t error = setpoint - measurement;
// 比例项
int32_t p_term = (pid->Kp * error) >> 15;
// 积分项 (防饱和)
pid->integral += error;
if (pid->integral > pid->out_max) pid->integral = pid->out_max;
if (pid->integral < pid->out_min) pid->integral = pid->out_min;
int32_t i_term = (pid->Ki * pid->integral) >> 15;
// 微分项
int32_t d_error = error - pid->prev_error;
int32_t d_term = (pid->Kd * d_error) >> 15;
pid->prev_error = error;
// 输出计算
int32_t output = p_term + i_term + d_term;
// 输出限幅
if (output > pid->out_max) output = pid->out_max;
if (output < pid->out_min) output = pid->out_min;
return output;
}自适应补偿算法:
频率响应补偿:
1. 在线辨识负载特性:
- 注入小信号扰动
- 测量幅频/相频响应
- 计算极点/零点位置
2. 自适应补偿器参数:
if (负载为阻性) {
增加比例增益Kp
减小积分时间Ti
} else if (负载为容性) {
增加微分增益Kd
增加相位裕量
} else if (负载为感性) {
增加高频增益衰减
增加稳定性裕度
}
3. 实时参数调整:
- 基于温度变化调整
- 基于输入电压调整
- 基于老化程度调整4.3 低噪声LDO设计
4.3.1 三级噪声抑制架构
辅助降噪电路 第三级: 后滤波噪声抑制 第二级: 功率级噪声抑制 第一级: 参考源噪声抑制 抖动注入电路 前馈补偿 温度补偿 RC后置滤波器 最终输出电压 有源滤波器 误差放大器 调整管阵列 LDO输出电压 反馈分压网络 噪声抵消电路 低通滤波器1 带隙基准 缓冲放大器 清洁参考电压 LDO输入电压
4.3.2 关键性能指标实现
噪声性能:
| 频率范围 | 目标噪声密度 | 实现技术 | 测试方法 |
|---|---|---|---|
| 0.1-10Hz | <10µVrms | 斩波稳定技术 | 示波器AC耦合,10秒采集 |
| 10Hz-1kHz | <20µV/√Hz | 低噪声运放,大尺寸器件 | 频谱分析仪 |
| 1kHz-100kHz | <50µV/√Hz | 高PSRR设计,多级滤波 | 网络分析仪 |
| 100kHz-10MHz | <100µV/√Hz | 片上后滤波器,屏蔽布局 | 高频探头测量 |
电源抑制比实现:
多级PSRR增强策略:
低频PSRR (<1kHz): >90dB
- 高增益误差放大器 (100dB开环增益)
- 共源共栅电流镜
- 长沟道输入对管
中频PSRR (1kHz-100kHz): >80dB
- 前馈补偿技术
- 片上去耦电容阵列
- 电源纹波注入抵消
高频PSRR (100kHz-10MHz): >60dB
- 调整管分布式布局
- 衬底噪声隔离环
- 外部大容量去耦
瞬态PSRR: >50dB @ 1mA/µs
- 快速响应补偿
- 自适应偏置电流
- 多环路控制4.3.3 动态性能优化
负载瞬态响应增强:
两级响应机制:
第一级: 快速响应 (ns级)
- 瞬态检测比较器
- 辅助调整管快速开启
- 前馈电流注入
第二级: 精确调节 (µs级)
- 主误差放大器补偿
- 自适应偏置提升
- 数字辅助校准
数学建模:
dV_out/dt = (I_load - I_ldo) / C_out
其中:
I_ldo = I_steady + I_boost × exp(-t/τ_boost)
τ_boost = C_boost / g_m_aux
设计目标:
- 负载阶跃 0→100mA: 过冲<30mV, 恢复时间<1µs
- 负载阶跃 100mA→0: 下冲<40mV, 恢复时间<2µs
- 建立精度: 最终稳定在±1%以内4.4 动态电压频率调节技术
4.4.1 智能DVFS算法
反馈调整 执行控制 DVFS决策引擎 系统监控 性能监测 功耗监测 自适应调整 电压命令 频率命令 PMU电压调节 PLL频率调节 时序协调器 执行切换 工作量估计 约束条件 优化器 DVFS查找表 参数集合 负载历史记录 CPU负载监测 性能需求预测 任务队列分析 热预算计算 温度监测 功率预算计算 电池状态
4.4.2 电压-频率关系建模
硅特性建模:
最小工作电压计算:
V_min(f) = V_th + K1 × f + K2 × T + K3 × aging
其中:
V_th = 阈值电压 (工艺相关)
K1 = 频率系数 (0.3mV/MHz)
K2 = 温度系数 (-0.5mV/°C)
K3 = 老化系数 (每年增加1%)
安全裕量:
V_actual(f) = V_min(f) + V_margin
V_margin = max(50mV, 10% × V_min)
能效最优工作点:
寻找最小 EDP = Energy × Delay
优化目标: min[ (C × V² × f) × (1/f) ] = min(C × V²)
约束条件: f ≥ f_required, V ≥ V_min(f)DVFS查找表实例:
| 性能等级 | CPU频率 | 核心电压 | 外设电压 | 内存频率 | 能效得分 |
|---|---|---|---|---|---|
| 超高性能 | 120MHz | 1.40V | 1.80V | 60MHz | 65% |
| 高性能 | 72MHz | 1.20V | 1.80V | 48MHz | 80% |
| 平衡模式 | 48MHz | 1.00V | 1.80V | 24MHz | 90% |
| 节能模式 | 24MHz | 0.90V | 1.80V | 12MHz | 95% |
| 低功耗 | 8MHz | 0.80V | 1.20V | 8MHz | 98% |
| 睡眠模式 | 1MHz | 0.75V | 1.20V | 1MHz | 99% |
4.4.3 自适应电压调节算法
实时电压校准:
c
// 自适应电压调节数据结构
typedef struct {
uint16_t frequency_mhz; // 当前频率
uint16_t nominal_mv; // 标称电压
uint16_t actual_mv; // 实际电压
uint8_t margin_percent; // 裕量百分比
int8_t temperature_c; // 温度补偿
uint8_t aging_factor; // 老化因子
uint16_t min_safe_mv; // 最小安全电压
} voltage_profile_t;
// 电压优化算法
uint16_t optimize_voltage(voltage_profile_t *profile, uint8_t error_count) {
uint16_t new_voltage = profile->actual_mv;
// 基于错误率调整
if (error_count > ERROR_THRESHOLD_HIGH) {
// 电压不足,增加裕量
new_voltage += VOLTAGE_STEP_UP;
profile->margin_percent += 2;
} else if (error_count < ERROR_THRESHOLD_LOW) {
// 电压过高,减少裕量
new_voltage -= VOLTAGE_STEP_DOWN;
profile->margin_percent -= 1;
}
// 温度补偿
int16_t temp_comp = (profile->temperature_c - 25) * TEMP_COEFFICIENT;
new_voltage += temp_comp;
// 老化补偿
new_voltage += profile->aging_factor * AGING_COEFFICIENT;
// 确保在安全范围内
if (new_voltage < profile->min_safe_mv) {
new_voltage = profile->min_safe_mv;
}
if (new_voltage > VOLTAGE_MAX_SAFE) {
new_voltage = VOLTAGE_MAX_SAFE;
}
return new_voltage;
}4.5 混合模式调节技术
4.5.1 Buck-LDO混合调节器
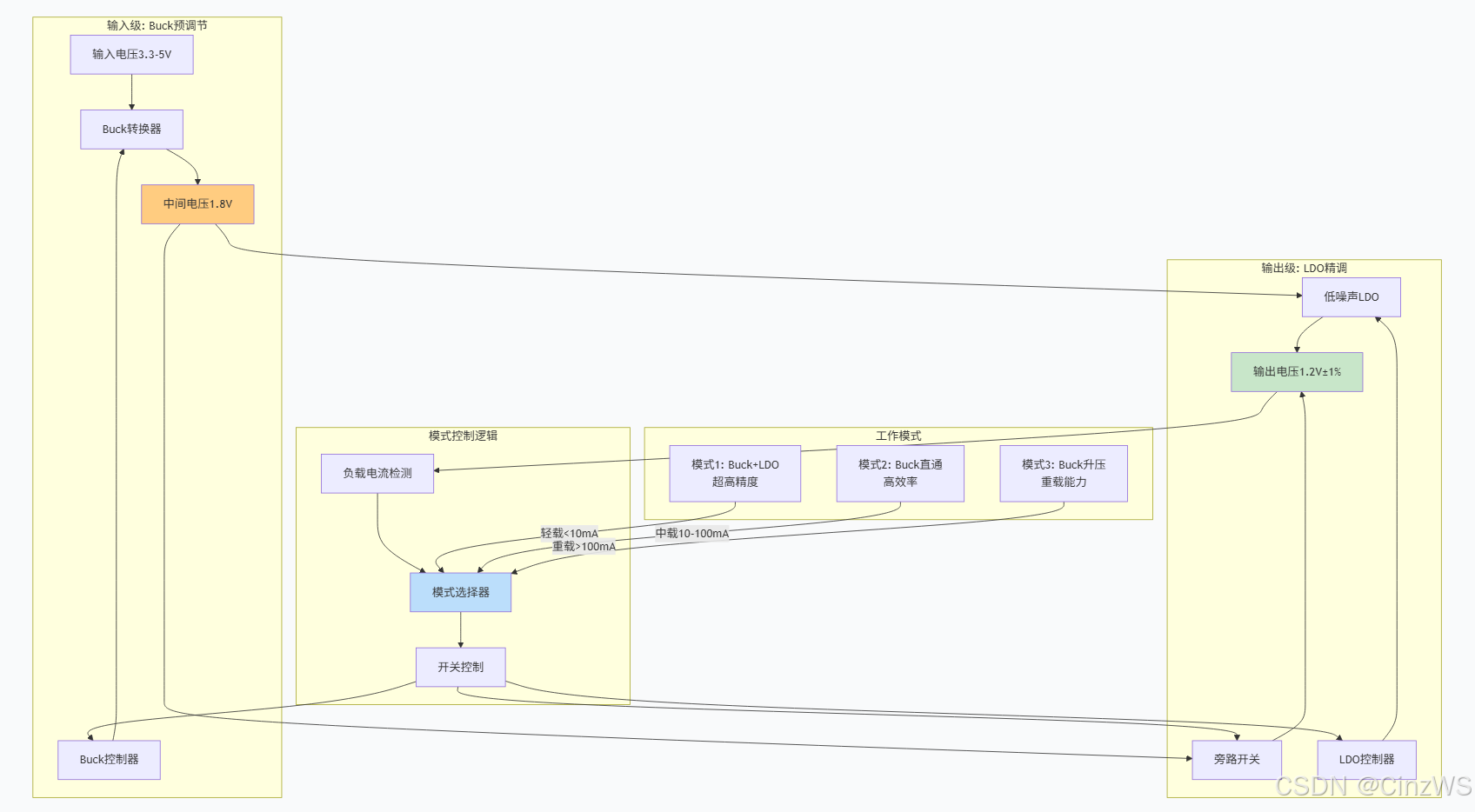
4.5.2 工作模式特性对比
| 工作模式 | 效率@轻载 | 效率@重载 | 纹波噪声 | 负载响应 | 适用场景 |
|---|---|---|---|---|---|
| Buck+LDO模式 | 40-60% | 70-80% | <5mV | 中等 | 模拟电路、ADC供电 |
| Buck直通模式 | 75-85% | 85-92% | 20-50mV | 快速 | 数字逻辑供电 |
| Buck升压模式 | 65-75% | 80-88% | 50-100mV | 极快 | 峰值负载、瞬态响应 |
智能模式切换算法:
模式切换决策:
if (负载电流 < 10mA) {
// 轻载模式: Buck+LDO
- 启用LDO精调
- Buck工作在PFM模式
- 优化噪声性能
} else if (负载电流 10-100mA) {
// 中载模式: Buck直通
- 旁路LDO
- Buck工作在PWM模式
- 优化效率
} else if (负载电流 > 100mA) {
// 重载模式: Buck升压
- 提高Buck开关频率
- 增加相位数
- 优化瞬态响应
}
滞回切换防止振荡:
切换点上升: 负载 > 阈值 + 迟滞
切换点下降: 负载 < 阈值 - 迟滞
迟滞量: 最大负载的10%4.6 先进控制技术
4.6.1 数字预测控制
模型预测控制算法:
c
// 预测模型参数
typedef struct {
float R_load; // 负载电阻估计
float C_out; // 输出电容
float L_filter; // 滤波电感
float R_esr; // 电容ESR
float R_dcr; // 电感DCR
} converter_model_t;
// MPC控制器
typedef struct {
converter_model_t model;
float horizon; // 预测时域
float control_interval; // 控制间隔
float weight_error; // 误差权重
float weight_effort; // 控制量权重
float u_min; // 最小占空比
float u_max; // 最大占空比
} mpc_controller_t;
// MPC计算函数
float mpc_compute_duty(mpc_controller_t *mpc, float v_ref, float v_meas, float i_load) {
float best_duty = 0.5f;
float best_cost = 1e9f;
// 离散搜索空间
for (float duty = mpc->u_min; duty <= mpc->u_max; duty += 0.01f) {
float cost = 0.0f;
float v_pred = v_meas;
// 预测未来状态
for (float t = 0; t < mpc->horizon; t += mpc->control_interval) {
// 状态空间模型
float dv_dt = (duty * VIN - v_pred) / (mpc->model.L_filter)
- (v_pred / (mpc->model.R_load * mpc->model.C_out));
v_pred += dv_dt * mpc->control_interval;
// 代价函数计算
float error = v_ref - v_pred;
cost += mpc->weight_error * error * error;
cost += mpc->weight_effort * duty * duty;
}
// 选择最优控制量
if (cost < best_cost) {
best_cost = cost;
best_duty = duty;
}
}
return best_duty;
}4.6.2 人工智能优化
神经网络电压预测:
网络架构:
输入层 (4个节点):
- 历史负载电流 (t-3, t-2, t-1)
- 当前负载电流 (t)
隐藏层 (8个节点):
- 全连接,ReLU激活函数
- Dropout防止过拟合
输出层 (1个节点):
- 预测负载电流 (t+1)
- 线性激活函数
训练数据:
- 实际工作负载trace
- 温度变化数据
- 电池状态数据
在线学习:
- 实时更新权重
- 滑动窗口训练
- 异常值检测与剔除4.7 可靠性增强设计
4.7.1 老化监测与补偿
老化监测电路:
老化监测方法:
1. 环形振荡器监测:
- 复制关键路径
- 监测振荡频率变化
- 推算老化程度
2. 阈值电压监测:
- 专用测试晶体管
- 测量Vth随时间变化
- 校准工作电压
3. 电流镜匹配度监测:
- 监测镜像电流比例
- 检测迁移率退化
- 调整偏置电流
补偿策略:
if (老化程度 > 5%) {
增加工作电压: ΔV = K_aging × aging_percent
降低最大频率: Δf = -K_freq × aging_percent
增加保护裕量
}4.7.2 故障检测与容错
实时故障检测矩阵:
| 故障类型 | 检测方法 | 检测时间 | 容错措施 |
|---|---|---|---|
| 功率管开路 | 电流镜像比较 | <100ns | 启用冗余单元 |
| 功率管短路 | 过流保护比较器 | <50ns | 快速关断,切换备用 |
| 电感饱和 | 峰值电流监测 | <200ns | 降低占空比,频率折叠 |
| 电容失效 | ESR监测 | 1ms | 调整补偿参数 |
| 温度漂移 | 温度传感器 | 10ms | 温度补偿调整 |
| 基准漂移 | 多基准比较 | 100µs | 切换备用基准 |
4.8 设计验证与优化
4.8.1 关键性能验证
效率验证测试点:
测试条件矩阵:
1. 输入电压: 最小值、典型值、最大值
2. 负载电流: 1µA、10µA、100µA、1mA、10mA、100mA、200mA
3. 温度: -40°C、25°C、85°C、125°C
4. 工作模式: PWM、PFM、突发、跳跃
效率测量公式:
η = (P_out / P_in) × 100%
P_out = V_out × I_out
P_in = V_in × I_in (包括静态电流)
目标效率曲线:
- 峰值效率 > 92% @ 100mA负载
- 10µA负载效率 > 70%
- 1µA负载效率 > 40%瞬态响应验证:
负载阶跃测试:
1. 小信号阶跃: 10mA → 20mA (10mA/µs)
目标: 过冲 < 20mV, 恢复时间 < 2µs
2. 中信号阶跃: 1mA → 100mA (100mA/µs)
目标: 过冲 < 50mV, 恢复时间 < 5µs
3. 大信号阶跃: 1µA → 200mA (200mA/µs)
目标: 过冲 < 100mV, 恢复时间 < 10µs
线阶跃测试:
输入电压阶跃: 3.3V → 5.0V (1V/µs)
目标: 输出电压扰动 < 30mV4.8.2 优化反馈循环
设计-验证-优化流程:
迭代优化流程:
1. 初始设计
- 基于规格要求的设计
- 初步电路仿真
2. 性能仿真
- 效率仿真 (Spectre)
- 瞬态响应仿真 (Spectre)
- 稳定性分析 (AC仿真)
3. 参数优化
- 基于仿真结果调整
- Pareto前沿优化
- 多目标权衡
4. 工艺角验证
- TT/FF/SS/FS/SF角
- 蒙特卡洛分析
- 良率估算
5. 版图后仿真
- 提取寄生参数
- 验证实际性能
- 调整设计
6. 硅验证
- 测试芯片测量
- 与仿真对比
- 参数调整4.9 总结与创新点
4.9.1 架构创新总结
-
多相自适应Buck架构
- 四相交错,自动相位增减
- 全负载范围效率优化
- 无缝模式切换
-
三级噪声抑制LDO
- 参考源、功率级、后滤波三级抑制
- 超低噪声性能
- 高PSRR设计
-
智能DVFS系统
- 基于负载预测的电压调节
- 温度/老化自适应补偿
- 能效最优工作点搜索
-
混合模式调节技术
- Buck-LDO混合,兼顾效率与精度
- 智能模式切换算法
- 负载自适应优化
-
先进控制算法
- 数字预测控制
- 神经网络优化
- 自适应参数调整
4.9.2 可质疑点应对策略
| 潜在质疑 | 技术应对 | 验证方法 |
|---|---|---|
| 模式切换稳定性 | 滞回控制,平滑过渡 | 瞬态仿真,实际测试 |
| 数字控制延迟 | 高速ADC,并行处理 | 时序分析,性能测试 |
| 老化补偿精度 | 多传感器融合,在线校准 | 加速老化测试 |
| 成本增加合理性 | 性能提升量化分析 | ROI计算,市场分析 |
| 工艺兼容性 | 标准BCD工艺,可移植设计 | 多工艺节点验证 |
4.9.3 未来技术方向
-
集成磁技术
- 片上电感集成
- 磁耦合技术
- 三维集成
-
宽禁带半导体
- GaN功率器件
- SiC二极管
- 高温工作能力
-
智能电源管理
- 自学习算法
- 预测性维护
- 云端优化
下一章将深入探讨电源监控与管理系统,包括电压/电流/温度监测、故障检测与保护、能量管理等关键技术。