【算法介绍】
基于YOLOv11的鱼病害检测系统是一种先进的解决方案,利用深度学习算法实现高效准确的目标检测。该系统采用YOLOv11目标检测算法训练数据集,专门用于检测与识别鱼类病害。
YOLOv11作为Ultralytics公司开发的最新一代算法模型,具有速度更快、准确率更高的优势。其全新的网络结构,包括优化的骨干网络、Anchor-Free检测头和新的损失函数,使得模型在各种硬件平台上都能表现出色。
在鱼病害检测系统中,用户可以上传图片、视频或通过摄像头实时输入数据进行检测。系统会对输入数据进行处理,利用已训练的YOLOv11模型对鱼类病害进行识别,并将检测结果可视化展示。用户可以根据需要调整检测置信分和IOU(Intersection over Union)阈值,以过滤掉低于某个阈值的检测结果。
此外,该系统还支持检测结果的导出功能,用户可以将检测后的图片或视频保存到本地。系统还会记录每次检测的前向推理时间,为评估模型性能和优化系统提供重要参考。
总之,基于YOLOv11的鱼病害检测系统为鱼类病害的快速识别和诊断提供了一种高效、准确的解决方案。该系统具有用户友好的界面和强大的功能,适用于水产养殖、科研机构和渔业监管部门等多种应用场景。
【效果展示】


【测试环境】
windows10 x64系统
VS2019
netframework4.7.2
opencvsharp4.9.0
onnxruntime1.22.0
【模型可以检测出类别】
kuiyang (溃疡)
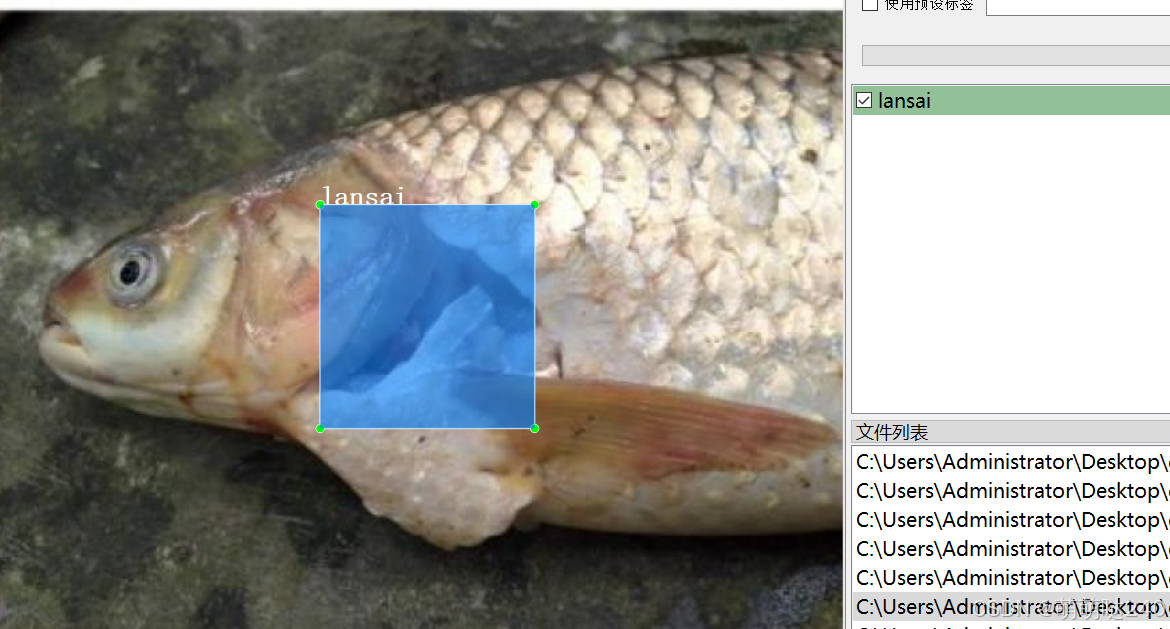
lansai (烂腮)
qisunshang (鳍损伤)
yanbing (眼病)
【训练数据集】
重要说明:数据集有2/3是增强图片,请认真观看图片预览,确认符合要求在下载
数据集格式:Pascal VOC格式+YOLO格式(不包含分割路径的txt文件,仅仅包含jpg图片以及对应的VOC格式xml文件和yolo格式txt文件)
图片数量(jpg文件个数):8474
标注数量(xml文件个数):8474
标注数量(txt文件个数):8474
标注类别数:4
标注类别名称:"kuiyang","lansai","qisunshang","yanbing"
每个类别标注的框数:
kuiyang (溃疡)框数 = 7085
lansai (烂腮)框数 = 2016
qisunshang (鳍损伤)框数 = 2380
yanbing (眼病) 框数 = 2147
总框数:13628
使用标注工具:labelImg
标注规则:对类别进行画矩形框
特别声明:本数据集不对训练的模型或者权重文件精度作任何保证,数据集只提供准确且合理标注
图片预览:
标注例子:
【训练信息】
|-----------------|-------|
| 参数 | 值 |
| 训练集图片数 | 7626 |
| 验证集图片数 | 848 |
| 训练map | 99.5% |
| 训练精度(Precision) | 98.8% |
| 训练召回率(Recall) | 98.2% |
【验证集精度统计】
|------------|--------|-----------|-------|-------|-------|----------|
| Class | Images | Instances | P | R | mAP50 | mAP50-95 |
| all | 848 | 1386 | 0.988 | 0.982 | 0.995 | 0.895 |
| kuiyang | 446 | 722 | 0.985 | 0.974 | 0.994 | 0.889 |
| lansai | 201 | 202 | 0.99 | 0.981 | 0.995 | 0.895 |
| qisunshang | 229 | 268 | 0.997 | 0.985 | 0.995 | 0.923 |
| yanbing | 181 | 194 | 0.98 | 0.987 | 0.994 | 0.873 |
【界面设计】
using DeploySharp.Data;
using OpenCvSharp;
using System;
using System.Collections.Generic;
using System.ComponentModel;
using System.Data;
using System.Diagnostics;
using System.Drawing;
using System.IO;
using System.Linq;
using System.Text;
using System.Threading;
using System.Threading.Tasks;
using System.Windows.Forms;
namespace FIRC
{
public partial class Form1 : Form
{
public bool videoStart = false;//视频停止标志
string weightsPath = Application.StartupPath + "\\weights";//模型目录
YoloDetector detetor = new YoloDetector();//推理引擎
public Form1()
{
InitializeComponent();
CheckForIllegalCrossThreadCalls = false;//线程更新控件不报错
}
private void LoadWeightsFromDir()
{
var di = new DirectoryInfo(weightsPath);
foreach(var fi in di.GetFiles("*.onnx"))
{
comboBox1.Items.Add(fi.Name);
}
if(comboBox1.Items.Count>0)
{
comboBox1.SelectedIndex = 0;
}
else
{
tssl_show.Text = "未找到模型,请关闭程序,放入模型到weights文件夹!";
tsb_pic.Enabled = false;
tsb_video.Enabled = false;
tsb_camera.Enabled = false;
}
}
private void Form1_Load(object sender, EventArgs e)
{
LoadWeightsFromDir();//从目录加载模型
}
public string GetResultString(DetResult[] result)
{
Dictionary<string, int> resultDict = new Dictionary<string, int>();
for (int i = 0; i < result.Length; i++)
{
if(resultDict.ContainsKey( result[i].Category) )
{
resultDict[result[i].Category]++;
}
else
{
resultDict[result[i].Category] =1;
}
}
var resultStr = "";
foreach(var item in resultDict)
{
resultStr += string.Format("{0}:{1}\r\n",item.Key,item.Value);
}
return resultStr;
}
private void tsb_pic_Click(object sender, EventArgs e)
{
OpenFileDialog ofd = new OpenFileDialog();
ofd.Filter = "*.*|*.bmp;*.jpg;*.jpeg;*.tiff;*.tiff;*.png";
if (ofd.ShowDialog() != DialogResult.OK) return;
tssl_show.Text = "正在检测中...";
Task.Run(() => {
var sw = new Stopwatch();
sw.Start();
Mat image = Cv2.ImRead(ofd.FileName);
detetor.SetParams(Convert.ToSingle(numericUpDown1.Value), Convert.ToSingle(numericUpDown2.Value));
var results=detetor.Inference(image);
var resultImage = detetor.DrawImage(image, results);
sw.Stop();
pb_show.Image = OpenCvSharp.Extensions.BitmapConverter.ToBitmap(resultImage);
tb_res.Text = GetResultString(results);
tssl_show.Text = "检测已完成!总计耗时"+sw.Elapsed.TotalSeconds+"秒";
});
}
public void VideoProcess(string videoPath)
{
Task.Run(() => {
detetor.SetParams(Convert.ToSingle(numericUpDown1.Value), Convert.ToSingle(numericUpDown2.Value));
VideoCapture capture = new VideoCapture(videoPath);
if (!capture.IsOpened())
{
tssl_show.Text="视频打开失败!";
return;
}
Mat frame = new Mat();
var sw = new Stopwatch();
int fps = 0;
while (videoStart)
{
capture.Read(frame);
if (frame.Empty())
{
Console.WriteLine("data is empty!");
break;
}
sw.Start();
var results = detetor.Inference(frame);
var resultImg = detetor.DrawImage(frame,results);
sw.Stop();
fps = Convert.ToInt32(1 / sw.Elapsed.TotalSeconds);
sw.Reset();
Cv2.PutText(resultImg, "FPS=" + fps, new OpenCvSharp.Point(30, 30), HersheyFonts.HersheyComplex, 1.0, new Scalar(255, 0, 0), 3);
//显示结果
pb_show.Image = OpenCvSharp.Extensions.BitmapConverter.ToBitmap(resultImg);
tb_res.Text = GetResultString(results);
Thread.Sleep(5);
}
capture.Release();
pb_show.Image = null;
tssl_show.Text = "视频已停止!";
tsb_video.Text = "选择视频";
});
}
public void CameraProcess(int cameraIndex=0)
{
Task.Run(() => {
detetor.SetParams(Convert.ToSingle(numericUpDown1.Value), Convert.ToSingle(numericUpDown2.Value));
VideoCapture capture = new VideoCapture(cameraIndex);
if (!capture.IsOpened())
{
tssl_show.Text = "摄像头打开失败!";
return;
}
Mat frame = new Mat();
var sw = new Stopwatch();
int fps = 0;
while (videoStart)
{
capture.Read(frame);
if (frame.Empty())
{
Console.WriteLine("data is empty!");
break;
}
sw.Start();
var results = detetor.Inference(frame);
var resultImg = detetor.DrawImage(frame, results);
sw.Stop();
fps = Convert.ToInt32(1 / sw.Elapsed.TotalSeconds);
sw.Reset();
Cv2.PutText(resultImg, "FPS=" + fps, new OpenCvSharp.Point(30, 30), HersheyFonts.HersheyComplex, 1.0, new Scalar(255, 0, 0), 3);
//显示结果
pb_show.Image = OpenCvSharp.Extensions.BitmapConverter.ToBitmap(resultImg);
tb_res.Text = GetResultString(results);
Thread.Sleep(5);
}
capture.Release();
pb_show.Image = null;
tssl_show.Text = "摄像头已停止!";
tsb_camera.Text = "打开摄像头";
});
}
private void tsb_video_Click(object sender, EventArgs e)
{
if(tsb_video.Text=="选择视频")
{
OpenFileDialog ofd = new OpenFileDialog();
ofd.Filter = "视频文件(*.*)|*.mp4;*.avi";
if (ofd.ShowDialog() != DialogResult.OK) return;
videoStart = true;
VideoProcess(ofd.FileName);
tsb_video.Text = "停止";
tssl_show.Text = "视频正在检测中...";
}
else
{
videoStart = false;
}
}
private void tsb_camera_Click(object sender, EventArgs e)
{
if (tsb_camera.Text == "打开摄像头")
{
videoStart = true;
CameraProcess(0);
tsb_camera.Text = "停止";
tssl_show.Text = "摄像头正在检测中...";
}
else
{
videoStart = false;
}
}
private void tsb_exit_Click(object sender, EventArgs e)
{
videoStart = false;
this.Close();
}
private void trackBar1_Scroll(object sender, EventArgs e)
{
numericUpDown1.Value = Convert.ToDecimal(trackBar1.Value / 100.0f);
}
private void trackBar2_Scroll(object sender, EventArgs e)
{
numericUpDown2.Value = Convert.ToDecimal(trackBar2.Value / 100.0f);
}
private void numericUpDown1_ValueChanged(object sender, EventArgs e)
{
trackBar1.Value = (int)(Convert.ToSingle(numericUpDown1.Value) * 100);
}
private void numericUpDown2_ValueChanged(object sender, EventArgs e)
{
trackBar2.Value = (int)(Convert.ToSingle(numericUpDown2.Value) * 100);
}
private void comboBox1_SelectedIndexChanged(object sender, EventArgs e)
{
tssl_show.Text="加载模型:"+comboBox1.Text;
detetor.LoadWeights(weightsPath+"\\"+comboBox1.Text);
tssl_show.Text = "模型加载已完成!";
}
}
}【常用评估参数介绍】
在目标检测任务中,评估模型的性能是至关重要的。你提到的几个术语是评估模型性能的常用指标。下面是对这些术语的详细解释:
Class:
这通常指的是模型被设计用来检测的目标类别。例如,一个模型可能被训练来检测车辆、行人或动物等不同类别的对象。
Images:
表示验证集中的图片数量。验证集是用来评估模型性能的数据集,与训练集分开,以确保评估结果的公正性。
Instances:
在所有图片中目标对象的总数。这包括了所有类别对象的总和,例如,如果验证集包含100张图片,每张图片平均有5个目标对象,则Instances为500。
P(精确度Precision):
精确度是模型预测为正样本的实例中,真正为正样本的比例。计算公式为:Precision = TP / (TP + FP),其中TP表示真正例(True Positives),FP表示假正例(False Positives)。
R(召回率Recall):
召回率是所有真正的正样本中被模型正确预测为正样本的比例。计算公式为:Recall = TP / (TP + FN),其中FN表示假负例(False Negatives)。
mAP50:
表示在IoU(交并比)阈值为0.5时的平均精度(mean Average Precision)。IoU是衡量预测框和真实框重叠程度的指标。mAP是一个综合指标,考虑了精确度和召回率,用于评估模型在不同召回率水平上的性能。在IoU=0.5时,如果预测框与真实框的重叠程度达到或超过50%,则认为该预测是正确的。
mAP50-95:
表示在IoU从0.5到0.95(间隔0.05)的范围内,模型的平均精度。这是一个更严格的评估标准,要求预测框与真实框的重叠程度更高。在目标检测任务中,更高的IoU阈值意味着模型需要更准确地定位目标对象。mAP50-95的计算考虑了从宽松到严格的多个IoU阈值,因此能够更全面地评估模型的性能。
这些指标共同构成了评估目标检测模型性能的重要框架。通过比较不同模型在这些指标上的表现,可以判断哪个模型在实际应用中可能更有效。
【使用步骤】
使用步骤:
(1)首先根据官方框架ultralytics安装教程安装好yolov8环境,并根据官方export命令将自己pt模型转成onnx模型,然后去github仓库futureflsl/firc-csharp-projects找到源码
(2)使用vs2019打开sln项目,选择x64 release并且修改一些必要的参数,比如输入shape等,点击运行即可查看最后效果
特别注意如果运行报错了,请参考我的博文进行重新引用我源码的DLL:C#opencvsharp报错System.Memory,Version=4.0.1.2,Culture=neutral,PublicKeyToken=cc7b13fcd2ddd51"版本高于所引_未能加载文件或程序集"system.memory, version=4.0.1.2, culture-CSDN博客
【提供文件】
C#源码
yolo11n.onnx模型(提供pytorch模型)
训练的map,P,R曲线图(在weights\results.png)
测试图片(在test_img文件夹下面)
特别注意这里提供训练数据集