Harris 角点检测简介
Harris 角点检测(Harris Corner Detector)是计算机视觉中经典的特征点检测算法,由 Chris Harris 和 Mike Stephens 在 1988 年提出。它用于从图像中找到"角点"(Corner),也称为兴趣点(Interest Point),这些点通常是图像中梯度变化最大的区域,对图像匹配、跟踪、三维重建和 SLAM 等任务非常重要。
角点的典型特征是:横向、纵向方向上都有强烈梯度变化。例如,建筑物的窗角、棋盘格的交点、物体边缘的转折点等。
Harris 检测器的优点:
- 不受图像旋转影响(旋转不变)
- 稳定性较好
- 计算量比 SIFT/SURF 小,适合实时场景
- 在噪声不大、光照稳定的情况下效果优秀
缺点:
- 不具有尺度不变性(大小变化检测不稳)
- 对噪声敏感
- 角点响应值需要阈值判断
角点的基本思想:灰度变化矩阵
Harris 算法的核心思想来自 图像灰度变化矩阵(Structure Tensor)。
对于图像中任意一个小窗口,Harris 算法会衡量"窗口在各个方向上的移动会让灰度变化多大"。如果向任意方向移动都会造成显著变化,这个点就是角点。
数学思想如下:
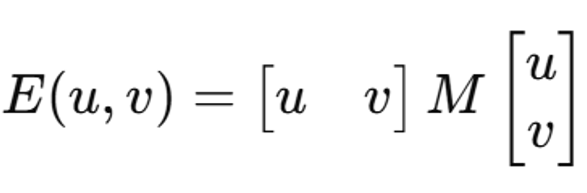
给定图像 I(x, y),考虑其在小范围内的移动:

其中:
- (u, v) 是窗口移动偏移量
- w 是窗口权值函数(一般为高斯核)
- E(u,v) 描述移动后引起的灰度变化
经过泰勒展开并保留一阶项,可得:

代入后得到:
其中:
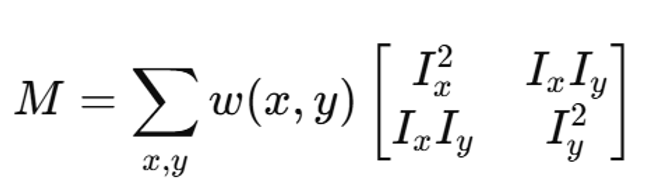
矩阵 M 就是 结构张量,反映局部区域的梯度分布。
Harris 响应函数 R
Harris 定义角点响应值:

其中:
- det(M) = λ1·λ2
- trace(M) = λ1 + λ2
- λ1、λ2 是 M 的特征值
- k 为经验参数(常取 0.04~0.06)
特征值对应的意义:
- λ1 和 λ2 都大 → 角点
- λ1 大 λ2 小 → 边缘
- λ1 和 λ2 都小 → 平坦区域
因此 R 的意义如下:
- R > 0 → 角点
- R < 0 → 边缘
- R ≈ 0 → 平坦区域
OpenCV 会对 R 图进行阈值处理,找出显著角点。
Harris 角点检测流程
- 读入图像并转灰度
- 求图像梯度 Ix、Iy
- 构造结构张量 M
- 根据公式计算 R
- 通过阈值选出显著角点
- 用圆点或颜色标记角点位置
OpenCV 的 Harris API
OpenCV 提供的函数:
python
cv2.cornerHarris(src, blockSize, ksize, k)参数解释:
| 参数 | 含义 |
|---|---|
| src | 输入灰度图(float32) |
| blockSize | 计算结构张量 M 的窗口大小 |
| ksize | Sobel 导数核大小(一般 = 3) |
| k | Harris 常数(0.04~0.06) |
示例
python
import cv2
import numpy as np
# 读取图像
img = cv2.imread("test.png")
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 转 float32 ------ Harris 要求
gray = np.float32(gray)
# Harris 角点检测
harris = cv2.cornerHarris(
gray,
blockSize=2, # 窗口大小
ksize=3, # Sobel算子
k=0.04 # Harris参数
)
# 对结果膨胀处理,便于显示
harris = cv2.dilate(harris, None)
# 阈值显示角点
threshold = 0.01 * harris.max()
# 标记角点位置为红色
result = img.copy()
result[harris > threshold] = [0, 0, 255]
# ------------------------------
# 调整显示尺寸,适应电脑屏幕
# ------------------------------
def resize_for_display(img, max_width=800, max_height=600):
h, w = img.shape[:2]
scale_w = max_width / w
scale_h = max_height / h
scale = min(scale_w, scale_h, 1.0) # 不放大,只缩小
new_w, new_h = int(w*scale), int(h*scale)
resized = cv2.resize(img, (new_w, new_h))
return resized
harris_disp = resize_for_display(harris)
result_disp = resize_for_display(result)
# 创建可伸缩窗口
cv2.namedWindow("Harris Response", cv2.WINDOW_NORMAL)
cv2.namedWindow("Corners", cv2.WINDOW_NORMAL)
cv2.imshow("Harris Response", harris_disp)
cv2.imshow("Corners", result_disp)
cv2.waitKey(0)
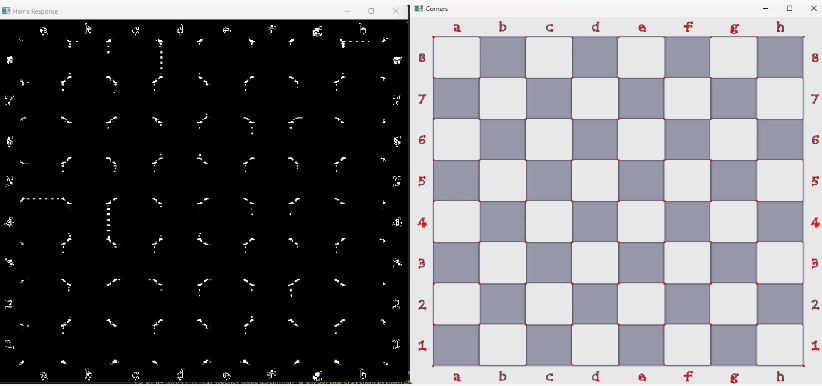
cv2.destroyAllWindows()执行效果:
参数调节建议
-
blockSize(常用 2~4)
-
小值:对小角点敏感,但容易受噪声干扰
-
大值:检测更稳定,但可能漏检
-
-
ksize(常用 3)
越大越平滑,越不敏感。
- k(常用 0.04~0.06)
调节角点响应力度:
-
小 k(0.04):角点较多
-
大 k(0.06):角点更严格
Harris 角点的优势与局限
优势
- 计算简单,适合实时应用
- 对图像旋转不敏感
- 角点定位准确
- 适合特征匹配和跟踪任务(如 Lucas-Kanade 光流)
局限
- 不具备尺度不变性(放大后的图像角点无法检测)
- 对噪声敏感,通常需要高斯模糊
- 对遮挡和光照变化敏感
- 无法描述角点(不能用于匹配,只能用于检测)
总结
Harris 角点检测是一种经典而高效的局部特征检测方法,尽管它缺乏尺度不变性,但仍然广泛应用于棋盘格标定、目标跟踪、图像配准等任务中。