matlab环境下用于非线性状态评估的无迹卡尔曼滤波器算法,为matlab程序。 附带一个运算例子。 可用于土木,机械及航空航天等领域。 本品为程序,例子可直接运行
在土木、机械以及航空航天等众多领域,非线性状态评估都是一个关键任务。无迹卡尔曼滤波器(Unscented Kalman Filter,UKF)在处理这类非线性问题时表现出色。今天咱们就来聊聊在 Matlab 环境下实现用于非线性状态评估的无迹卡尔曼滤波器算法。
算法原理简单说
UKF 的核心思想是通过一组 Sigma 点来近似状态分布,然后利用这些点经过非线性函数变换后的统计特性来估计状态和协方差。相比传统卡尔曼滤波器,它对非线性系统的处理更为直接有效。
Matlab 代码实现
matlab
% 定义系统参数
A = [1 0.1; 0 1]; % 状态转移矩阵
Q = [0.01 0; 0 0.01]; % 过程噪声协方差
H = [1 0]; % 观测矩阵
R = 0.1; % 观测噪声协方差
% 初始化
x_hat = zeros(2,1); % 初始状态估计
P = eye(2); % 初始估计协方差
n = size(x_hat,1); % 状态维度
lambda = 3 - n; % UKF 参数
alpha = 1e-3; % UKF 参数
beta = 2; % UKF 参数
% 模拟数据生成
t = 0:0.1:10;
x_true = zeros(2,length(t));
x_true(:,1) = [1; 0];
z = zeros(1,length(t));
for k = 2:length(t)
x_true(:,k) = A * x_true(:,k-1) + sqrtm(Q) * randn(2,1);
z(k) = H * x_true(:,k) + sqrt(R) * randn;
end
% UKF 过程
x_hat_history = zeros(2,length(t));
x_hat_history(:,1) = x_hat;
for k = 2:length(t)
% 时间更新
% 计算 Sigma 点
Wm = [lambda / (n + lambda); 0.5 / (n + lambda) * ones(2*n,1)]; % 均值权重
Wc = [lambda / (n + lambda) + (1 - alpha^2 + beta); 0.5 / (n + lambda) * ones(2*n,1)]; % 协方差权重
X = [x_hat repmat(x_hat,1,2*n) + chol((n + lambda) * P)' * [-eye(n); eye(n)]];
Xp = A * X;
x_hat_minus = Xp * Wm;
P_minus = (Xp - repmat(x_hat_minus,1,2*n+1)) * diag(Wc) * (Xp - repmat(x_hat_minus,1,2*n+1))' + Q;
% 测量更新
Y = H * Xp;
z_hat = Y * Wm;
Pzz = (Y - repmat(z_hat,1,2*n+1)) * diag(Wc) * (Y - repmat(z_hat,1,2*n+1))' + R;
Pxz = (Xp - repmat(x_hat_minus,1,2*n+1)) * diag(Wc) * (Y - repmat(z_hat,1,2*n+1))';
K = Pxz / Pzz;
x_hat = x_hat_minus + K * (z(k) - z_hat);
P = P_minus - K * Pzz * K';
x_hat_history(:,k) = x_hat;
end代码分析
- 系统参数定义 :首先定义了状态转移矩阵
A、过程噪声协方差Q、观测矩阵H和观测噪声协方差R,这些参数是描述系统动态和噪声特性的关键。 - 初始化部分 :设置了初始状态估计
x_hat和初始估计协方差P,同时定义了 UKF 算法所需的一些参数,像lambda、alpha和beta,这些参数会影响 Sigma 点的分布和权重计算。 - 模拟数据生成 :通过循环利用状态转移方程和观测方程生成真实状态
x_true和观测数据z,用于后续的滤波验证。 - UKF 过程 :
- 时间更新 :计算 Sigma 点,这些点围绕当前状态估计分布,权重
Wm和Wc分别用于计算均值和协方差。然后通过状态转移矩阵得到预测的 Sigma 点Xp,进而计算预测状态xhatminus和预测协方差Pminus*。 - 测量更新 :对预测的 Sigma 点经过观测矩阵变换得到
Y,计算预测观测值z*hat,接着计算观测协方差Pzz和互协方差Pxz,从而得到卡尔曼增益K,最后更新状态估计x_hat和估计协方差P。
- 时间更新 :计算 Sigma 点,这些点围绕当前状态估计分布,权重
运算例子及运行
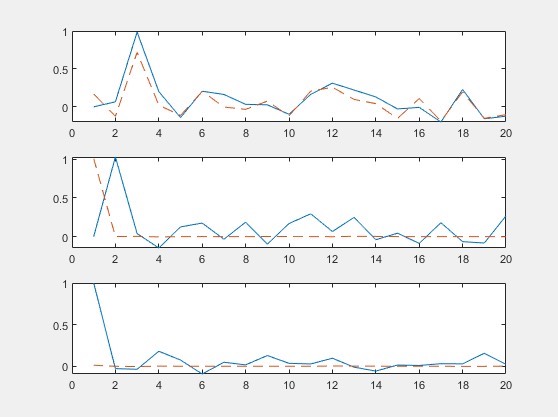
上述代码就是一个完整的例子,运行这段代码,Matlab 会模拟生成数据,并使用 UKF 进行状态估计。你可以通过绘图直观地看到估计状态与真实状态的对比,比如:
matlab
figure;
subplot(2,1,1);
plot(t,x_true(1,:),'b',t,x_hat_history(1,:),'r--');
legend('真实状态 x1','估计状态 x1');
xlabel('时间 t');
ylabel('状态值');
title('状态 x1 的估计');
subplot(2,1,2);
plot(t,x_true(2,:),'b',t,x_hat_history(2,:),'r--');
legend('真实状态 x2','估计状态 x2');
xlabel('时间 t');
ylabel('状态值');
title('状态 x2 的估计');这段额外的绘图代码能让你清楚地看到 UKF 在这个模拟系统中的滤波效果。在实际的土木、机械或航空航天应用中,只需根据具体系统调整相应的参数 A、Q、H、R 等,就可以用这个 UKF 算法对非线性系统的状态进行有效评估啦。希望这个分享能对你在相关领域的研究或项目有所帮助!