无刷直流电机 BLDC 转速电流双闭环调速系统 matlab simulink仿真
在电机控制领域,无刷直流电机(BLDC)因其高效、可靠、低维护等优点,被广泛应用于各个行业。而转速电流双闭环调速系统能够让BLDC实现更加精准、稳定的控制。今天就和大家聊聊如何使用Matlab Simulink对其进行仿真。
一、双闭环调速系统原理
转速电流双闭环调速系统,简单来说,就是由转速环和电流环组成。转速环作为外环,它的输出是电流环的给定值。电流环作为内环,根据转速环输出的给定值来调节电机的电流,进而控制电机的转矩,实现对电机转速的精确控制。
想象一下,你要开车从A点到B点,转速环就像是你心里设定的目标车速,而电流环则是根据路况实时调整油门大小,以保证车速尽量接近你设定的目标车速。
二、Matlab Simulink建模
1. 转速环建模
首先,我们在Simulink中搭建转速环部分。一般来说,转速环会包含一个PI调节器。PI调节器的作用是对转速偏差进行比例和积分运算,以输出合适的电流给定值。以下是简单的Matlab代码来实现一个基本的PI调节器逻辑(这里只是简单示意,非完整Simulink模块代码):
matlab
% 假设kp为比例系数,ki为积分系数
kp = 0.5;
ki = 0.1;
% 初始误差和积分项
error_prev = 0;
integral = 0;
% 当前转速和目标转速
current_speed = 100;
target_speed = 150;
% 计算误差
error = target_speed - current_speed;
% PI计算
output = kp * error + ki * (integral + error * dt);
% 更新积分项和上一次误差
integral = integral + error * dt;
error_prev = error;在这段代码中,kp和ki是PI调节器的关键参数,它们的取值需要根据实际系统进行调试优化。error是目标转速与当前转速的差值,通过比例项kp error**和积分项ki integral共同作用,得到输出值output,这个output就是给到电流环的给定值。
在Simulink中,我们可以直接使用自带的PI Controller模块,通过设置其参数Kp和Ki来实现类似功能。
2. 电流环建模
电流环同样需要一个PI调节器,用来调节电机的电流。它接收转速环输出的电流给定值,与实际电流值比较,产生控制信号去调节功率变换器,进而改变电机电流。代码示例如下(同样为简单示意):
matlab
% 电流环PI参数
kp_current = 0.2;
ki_current = 0.05;
% 初始电流误差和积分项
current_error_prev = 0;
current_integral = 0;
% 电流给定值和实际电流值
current_ref = 5;
actual_current = 4.5;
% 计算电流误差
current_error = current_ref - actual_current;
% 电流环PI计算
current_output = kp_current * current_error + ki_current * (current_integral + current_error * dt);
% 更新积分项和上一次电流误差
current_integral = current_integral + current_error * dt;
current_error_prev = current_error;这里的current_output最终会作用于功率变换器,以调整电机电流。在Simulink里,和转速环类似,也是通过配置PI Controller模块参数来实现电流环的PI调节功能。
3. BLDC电机模型搭建
在Simulink库中,有专门的BLDC电机模型模块。我们需要根据实际电机的参数,如定子电阻、电感、磁极对数等,对该模块进行配置。比如,假设我们的BLDC电机定子电阻为0.5Ω,电感为5mH,磁极对数为3,在电机模型模块中相应设置这些参数,就能较为准确地模拟实际电机的运行特性。
4. 整体系统连接
将转速环、电流环以及BLDC电机模型按照双闭环调速系统的原理连接起来。转速环的输出连接到电流环的给定端,电流环的输出连接到BLDC电机模型的控制端,同时将电机的转速和电流反馈到转速环和电流环的输入端,形成闭环控制系统。
三、仿真结果分析
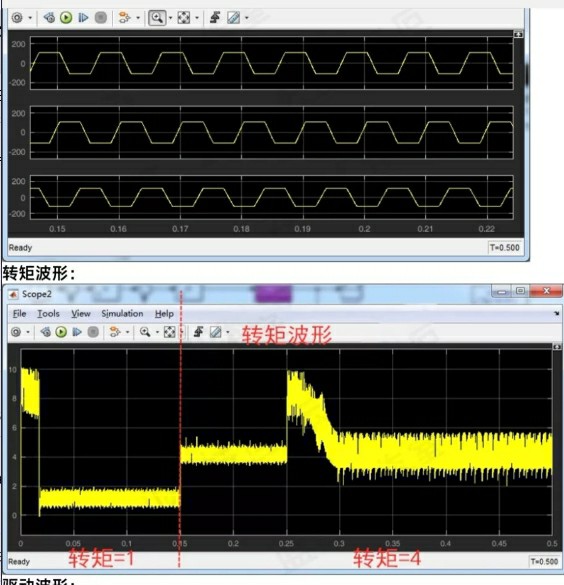
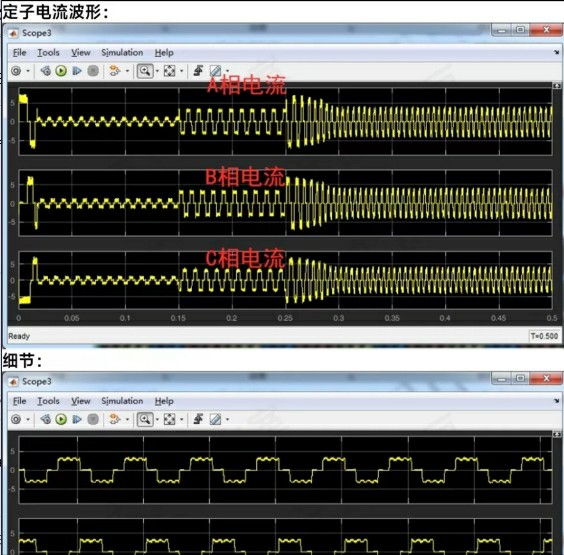
当我们完成模型搭建并设置好仿真参数后,就可以运行仿真了。通过观察仿真结果,我们可以看到电机转速如何跟随给定转速变化,以及电流在调节过程中的动态响应。
如果转速响应能够快速平稳地跟踪给定转速,且超调量较小,说明转速环的PI参数设置较为合理。同时,电流在启动和调速过程中,能够快速达到并稳定在合适的值,也表明电流环起到了良好的调节作用。
要是转速响应过慢或者超调过大,那就需要适当调整转速环PI调节器的Kp和Ki参数;如果电流波动较大或者调节不及时,就需要对电流环的PI参数进行优化。
总之,通过Matlab Simulink对无刷直流电机BLDC转速电流双闭环调速系统进行仿真,能够帮助我们深入理解系统的工作原理,同时方便我们对控制参数进行调试优化,为实际的电机控制系统设计提供有力的支持。希望大家都能动手试试这个有趣的仿真!