无人船,AUV,无人车 编队路径跟踪 领航跟随los制导反步控制 路径可调,模型可调 MATLAB程序
在自动化载具的领域中,无人船、AUV(自主水下航行器)以及无人车的编队路径跟踪是一个极富挑战与魅力的研究方向。今天咱就来唠唠基于领航跟随LOS(视线法)制导结合反步控制的实现,还得让路径和模型都能灵活调整,最后通过MATLAB程序来一展身手。
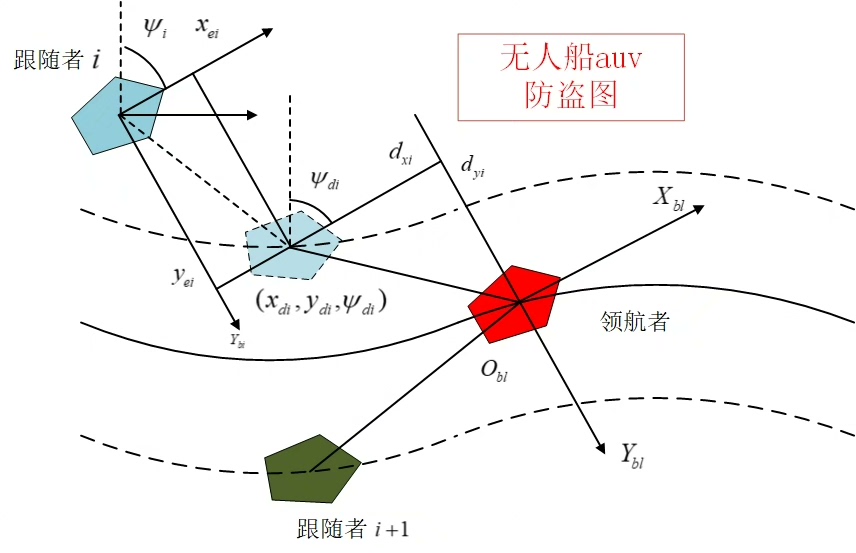
领航跟随LOS制导
LOS制导就像是给编队里的"小弟"们指了一条明路。想象一下,领航者在前面跑,跟随者得时刻盯着领航者,按照一定的规则去追。具体来讲,跟随者要保持和领航者之间有一条虚拟的视线(Line - of - Sight)。咱们来看段简单的代码示例(假设二维平面情况):
matlab
% 假设领航者位置
leader_x = 10;
leader_y = 10;
% 跟随者位置
follower_x = 5;
follower_y = 5;
% LOS向量计算
LOS_vector_x = leader_x - follower_x;
LOS_vector_y = leader_y - follower_y;
distance = sqrt(LOS_vector_x^2 + LOS_vector_y^2);在这段代码里,我们先设定了领航者和跟随者的位置,然后通过计算两者坐标差值得到LOS向量,并且算出了两者之间的距离。这距离和LOS向量方向对于跟随者调整自己的路径至关重要。
反步控制
反步控制是一种逐步构建控制律的方法,就像搭积木一样,一步一步把复杂的控制系统搭建起来。比如说,我们先对系统的一部分设计一个虚拟控制输入,然后基于这个虚拟输入,再为整个系统设计实际的控制输入。代码实现起来大概是这样:
matlab
% 假设系统状态变量
x = [1; 0]; % 例如 [位置; 速度]
% 第一步:设计虚拟控制输入
alpha1 = -x(1); % 简单示例,根据系统期望输出设计
% 第二步:设计实际控制输入
u = -x(2) - alpha1; 这里先定义了系统的状态变量,然后第一步设计了虚拟控制输入alpha1,它是基于系统的位置状态x(1)来设定的,目的是让系统朝着期望的位置变化。接着,在第二步根据虚拟控制输入和速度状态x(2)设计了实际的控制输入u,让系统能够按照我们设想的方式运行。
路径与模型可调
要实现路径可调,我们可以通过修改领航者的路径规划来达到目的。比如说,领航者原本是直线行驶,我们可以通过改变其目标点的设定,让它走曲线。对于模型可调,我们可以改变系统动力学模型中的参数。假设我们有一个简单的无人车动力学模型:
matlab
% 无人车动力学模型参数
m = 100; % 质量
C_d = 0.3; % 阻力系数
% 改变模型参数,例如改变质量
m_new = 150; 这里先设定了原始的模型参数,然后可以轻松地改变质量m的值,来调整无人车的动力学模型,进而影响其运动特性。
MATLAB完整程序示例
matlab
% 初始化参数
num_followers = 3; % 跟随者数量
time_step = 0.1; % 时间步长
total_time = 100; % 总模拟时间
% 初始化领航者路径
leader_path_x = zeros(1, total_time/time_step + 1);
leader_path_y = zeros(1, total_time/time_step + 1);
leader_path_x(1) = 0;
leader_path_y(1) = 0;
for i = 2:length(leader_path_x)
leader_path_x(i) = leader_path_x(i - 1) + 0.5; % 简单直线运动示例,可调整为复杂路径
leader_path_y(i) = leader_path_y(i - 1);
end
% 初始化跟随者位置
follower_positions_x = zeros(num_followers, total_time/time_step + 1);
follower_positions_y = zeros(num_followers, total_time/time_step + 1);
follower_positions_x(:,1) = [-2; -4; -6];
follower_positions_y(:,1) = [0; 0; 0];
for t = 2:length(leader_path_x)
for j = 1:num_followers
% LOS制导计算
LOS_vector_x = leader_path_x(t) - follower_positions_x(j,t - 1);
LOS_vector_y = leader_path_y(t) - follower_positions_y(j,t - 1);
distance = sqrt(LOS_vector_x^2 + LOS_vector_y^2);
% 反步控制计算
% 假设简单动力学模型,此处省略详细推导
u_x = -follower_positions_x(j,t - 1) + LOS_vector_x/distance;
u_y = -follower_positions_y(j,t - 1) + LOS_vector_y/distance;
follower_positions_x(j,t) = follower_positions_x(j,t - 1) + u_x * time_step;
follower_positions_y(j,t) = follower_positions_y(j,t - 1) + u_y * time_step;
end
end
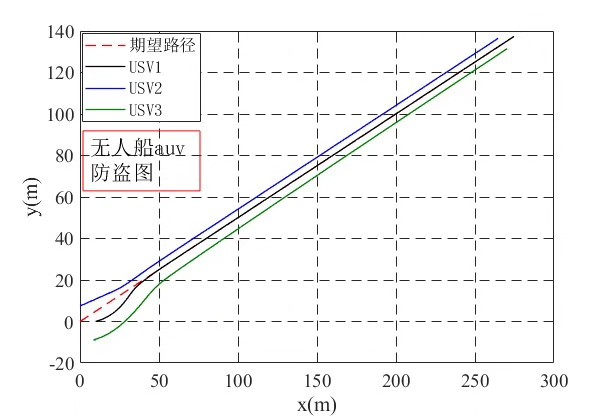
% 绘图
figure;
hold on;
plot(leader_path_x, leader_path_y, 'r', 'LineWidth', 2);
for j = 1:num_followers
plot(follower_positions_x(j,:), follower_positions_y(j,:), 'b--');
end
xlabel('X position');
ylabel('Y position');
legend('Leader', 'Follower 1', 'Follower 2', 'Follower 3');
title('Formation Path Tracking'); 这个完整的MATLAB程序,首先初始化了各种参数,包括跟随者数量、时间步长等。接着设定了领航者的路径,这里是简单的直线运动,你完全可以改成复杂的曲线等路径。然后对跟随者位置进行初始化,在主循环里,通过LOS制导和反步控制计算出每个跟随者下一时刻的位置,最后通过绘图展示出领航者和跟随者的运动轨迹。
无人船、AUV和无人车的编队路径跟踪充满了无限可能,通过LOS制导、反步控制以及灵活可调的路径与模型,再借助MATLAB强大的计算和绘图能力,我们能不断探索这个有趣的领域,为未来自动化载具的协同作业打下坚实基础。