基于FPGA的FOC电流环实现 1.仅包含基本的电流环 2.采用verilog语言编写 3.电流环PI控制器 4.采用SVPWM算法 5.均通过处理转为整数运算 6.采用ADC采样,型号为AD7928,反馈为AS5600 7.采用串口通信 8.代码层次结构清晰,可读性强 9.代码与实际硬件相结合,便于理解 10.包含对应的simulink模型(结合模型,和rtl图,更容易理解代码) 11.代码可以运行 12.适用于采用foc控制的bldc和pmsm 13.此为源码和simulink模型的售价,不包含硬件的图纸 A1 不是用Matlab等工具自动生成的代码,而是基于verilog,手动编写的 A2 二电平的Svpwm算法 A3 仅包含电流闭环 A4 单采样单更新,中断频率/计算频率,可以基于自己所移植的硬件,重新设置
本文深入剖析一个基于FPGA实现的磁场定向控制(Field-Oriented Control, FOC)系统,重点聚焦于其核心组成部分------电流环的实现机制。该设计采用Verilog硬件描述语言编写,充分利用FPGA的并行处理能力,实现了高实时性、高确定性的电机电流闭环控制。系统集成了Clark变换、Park变换、PI控制器、坐标系转换以及空间矢量脉宽调制(SVPWM)等关键模块,并包含了与外部传感器(磁编码器)和模数转换器(ADC)的接口逻辑,构成一个完整的嵌入式电机驱动解决方案。
系统架构与工作流程
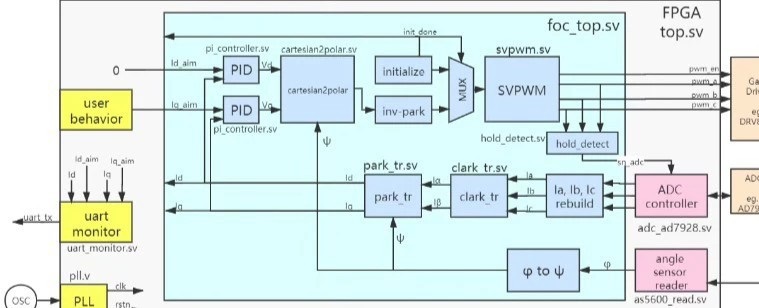
整个FOC系统以foc_top模块为核心,它协调所有子模块的工作,形成一个闭环控制流。系统的工作流程如下:
- 初始化阶段 :上电复位后,系统首先进入初始化状态。在此阶段,控制器强制输出一个幅值最大、角度为0的电压矢量,迫使电机转子旋转至电角度为0的基准位置。经过预设的初始化周期(由
INITCYCLES**参数决定)后,系统读取并锁存此时的角度传感器值作为初始机械角度偏移量(initphi),为后续精确的电角度计算奠定基础。
- 数据采集阶段 :初始化完成后,系统进入正常FOC控制循环。
svpwm模块产生的PWM信号驱动电机的三相逆变桥。当三相下桥臂同时导通时,holddetect**模块会检测到这一状态,并根据SAMPLEDELAY参数延时一段可配置的时间(以等待电流稳定),然后发出一个采样使能脉冲(sn_adc)。
- 信号处理与坐标变换 :外部ADC(如AD7928)在接收到
snadc**脉冲后,对三相电流进行采样,并将结果通过SPI接口传回FPGA。foctop模块首先根据基尔霍夫电流定律(KCL)从ADC原始值中计算出真实的三相电流(ia,ib,ic)。随后,clarktr**模块执行Clark变换,将三相静止坐标系(ABC)下的电流转换为两相静止坐标系(αβ)下的电流(ialpha,ibeta)。接着,parktr模块利用从磁编码器(如AS5600)读取的机械角度(phi),结合电机的极对数(POLE_PAIR)和初始偏移量,计算出当前电角度(psi),并据此执行Park变换,将αβ坐标系下的电流最终转换到与转子同步旋转的dq坐标系下,得到直轴电流(id)和交轴电流(iq)。
- 闭环控制与反变换 :在dq坐标系中,电流控制变得解耦且简单。两个独立的
picontroller**模块分别对id和iq进行PI控制。用户设定的目标电流idaim(通常为0以实现最大转矩)和iqaim*(控制电机转矩)与实际反馈值进行比较,PI控制器计算出所需的直轴电压(vd)和交轴电压(vq)。随后,cartesian2polar模块将直角坐标系下的电压矢量(vd,vq)转换为极坐标系下的幅值(vr*rho)和角度(vr_theta)。
- SVPWM生成与驱动 :最后,系统执行反Park变换,将转子极坐标系下的电压矢量转换回定子极坐标系,得到最终用于驱动的电压矢量(
vsrho*,vs*theta)。svpwm模块接收这两个参数,生成高频率(由系统时钟频率决定,例如36.864MHz时钟可产生18kHz的PWM)的三相PWM信号(pwma*,pwm*b,pwmc*)和使能信号(pwm*en),完成对电机的精确控制。
关键技术亮点
高精度三角函数与坐标变换
系统中的sincos模块采用查找表(LUT)结合象限判断的方式,高效地计算任意角度的正弦和余弦值,为Park变换提供了关键的三角函数支持。cartesian2polar模块则巧妙地结合了CORDIC算法的思想和LUT,实现了从直角坐标到极坐标的快速转换,这对于SVPWM的实现至关重要。
灵活的SVPWM实现
svpwm模块实现了经典的7段式SVPWM算法。其设计精巧,通过内部状态机和流水线操作,在单个PWM周期内完成所有计算,确保了PWM波形的精确性和实时性。MAX_AMP参数允许用户限制SVPWM的最大输出幅值,这在使用下桥臂电阻进行电流采样时尤为重要,可以保证足够的采样窗口。
完整的外设接口
该设计不仅包含了核心的FOC算法,还集成了与关键外设通信的完整逻辑。as5600read**和i2c registerread**模块实现了标准的I2C主机控制器,用于读取磁编码器的角度数据。adc ad7928模块则实现了SPI主机控制器,用于驱动多通道ADC芯片。这种一体化的设计大大简化了系统集成的复杂度。
实时监控与调试
顶层模块top中集成了一个UART监控器(uart_monitor),它可以周期性地将id, iq及其目标值通过串口发送出去。这为开发者在调试和性能分析时提供了宝贵的实时数据流,便于观察电流环的动态响应和控制效果。
总结
该FPGA-based FOC电流环实现是一个高度集成、结构清晰且性能优异的嵌入式控制方案。它将复杂的电机控制算法高效地映射到硬件逻辑中,充分发挥了FPGA在并行计算和确定性时序方面的优势。其模块化的设计使得各个功能单元清晰独立,便于理解、维护和二次开发。无论是用于学术研究还是工业产品开发,这套代码都提供了一个坚实可靠的基础。