三相异步电机基于空间矢量SVPWM的直接转矩 SVPWM- DTC控制 Matlab/Simulink仿真模型(成品) 采用SVPWM的直接转矩控制 1.转速环、转矩环、磁链环均采用PI控制 2.采用空间矢量SVPWM调制 3. 含磁链观测、转矩控制、开关状态选择等等 4.相比于传统DTC控制,转矩的脉动更小如图所示
在电机控制领域,三相异步电机基于空间矢量SVPWM的直接转矩控制(SVPWM - DTC)是一项备受瞩目的技术。今天咱就聊聊这个技术以及对应的Matlab/Simulink仿真模型。
一、SVPWM - DTC控制原理简述
传统的直接转矩控制(DTC)虽然响应速度快,但转矩脉动较大。而采用SVPWM的直接转矩控制则在一定程度上改善了这个问题。它通过巧妙地利用空间矢量脉宽调制(SVPWM)技术,对转矩和磁链进行更精准的控制。
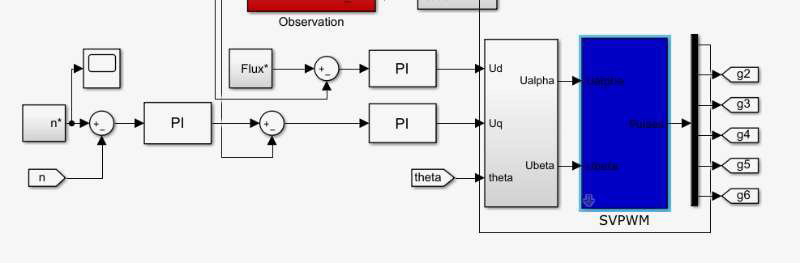
(一)三环PI控制
在这个控制策略里,转速环、转矩环、磁链环均采用PI控制。PI控制大家都很熟悉,它通过比例(P)和积分(I)环节,对输入偏差进行调节,使系统输出尽可能地跟踪给定值。以转速环为例,简单的Matlab代码实现如下:
matlab
% 定义PI参数
Kp = 0.5;
Ki = 0.1;
% 设定给定转速和实际转速
omega_ref = 100; % rad/s
omega = 80; % rad/s
% 初始化积分项
integral = 0;
% 时间步长
dt = 0.001;
for n = 1:1000
% 计算转速偏差
error = omega_ref - omega;
% 积分项更新
integral = integral + error * dt;
% PI控制输出
output = Kp * error + Ki * integral;
% 这里output可以用于后续对电机的控制调节
omega = omega + output * dt; % 模拟转速的更新
end上述代码中,通过不断计算转速偏差,并利用PI控制器进行调节,更新模拟的电机转速。转矩环和磁链环的PI控制原理类似,只是控制的对象不同。
(二)空间矢量SVPWM调制
空间矢量SVPWM调制是SVPWM - DTC控制的关键部分。它根据电机的空间矢量关系,生成合适的PWM信号,来控制逆变器的开关状态,进而控制电机的运行。下面是一个简单的SVPWM模块代码框架(为了简化,只展示关键部分逻辑):
matlab
% 定义逆变器直流母线电压
Vdc = 311;
% 计算参考电压矢量的幅值和角度
Vref_mag = 200;
Vref_angle = pi/6;
% 根据参考电压矢量计算三相桥臂的开关状态
alpha = Vref_mag * cos(Vref_angle);
beta = Vref_mag * sin(Vref_angle);
% 利用SVPWM算法计算开关时间
% 这里省略复杂的SVPWM算法实现,只展示思路
% 计算得到三相桥臂的开关时间Ta, Tb, Tc
Ta = 0.001;
Tb = 0.0015;
Tc = 0.0005;在实际应用中,会根据电机的运行状态实时计算参考电压矢量,然后精确计算出三相桥臂的开关时间,以实现对电机的有效控制。
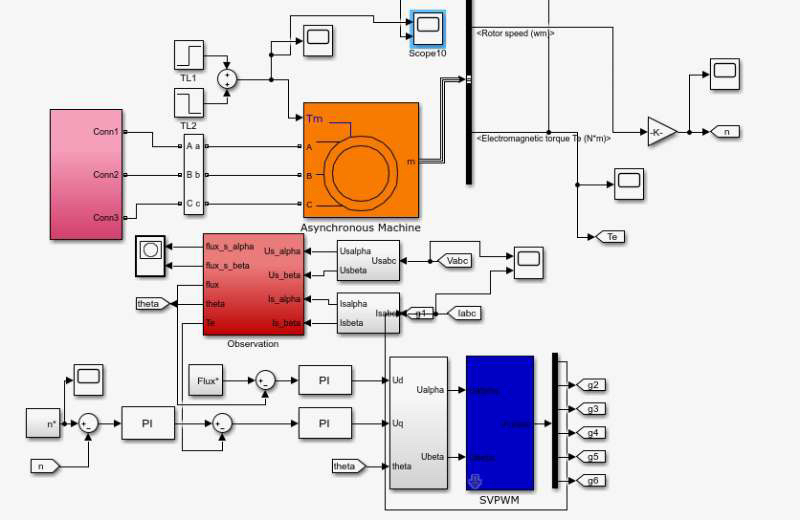
(三)其他关键环节
- 磁链观测:准确观测磁链对于精确的转矩控制至关重要。通常可以基于电机的数学模型,通过测量的电压和电流信号来估算磁链。例如采用电压模型法,根据电机的定子电压、电流和转速等信息,计算出磁链的大小和位置。
- 转矩控制:通过对转矩环的PI控制输出,结合磁链观测值,来调节电机的转矩。当转矩偏差为正时,增大控制量,使电机输出转矩增加;反之则减小。
- 开关状态选择:根据磁链和转矩的偏差,结合SVPWM调制算法,选择合适的逆变器开关状态,以达到最优的控制效果。
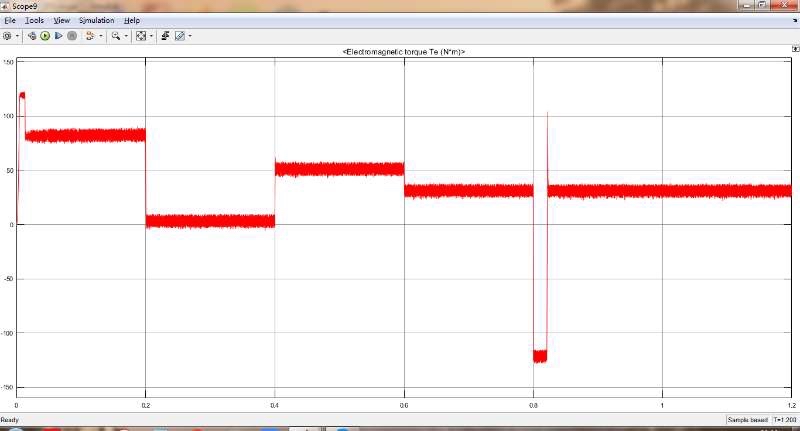
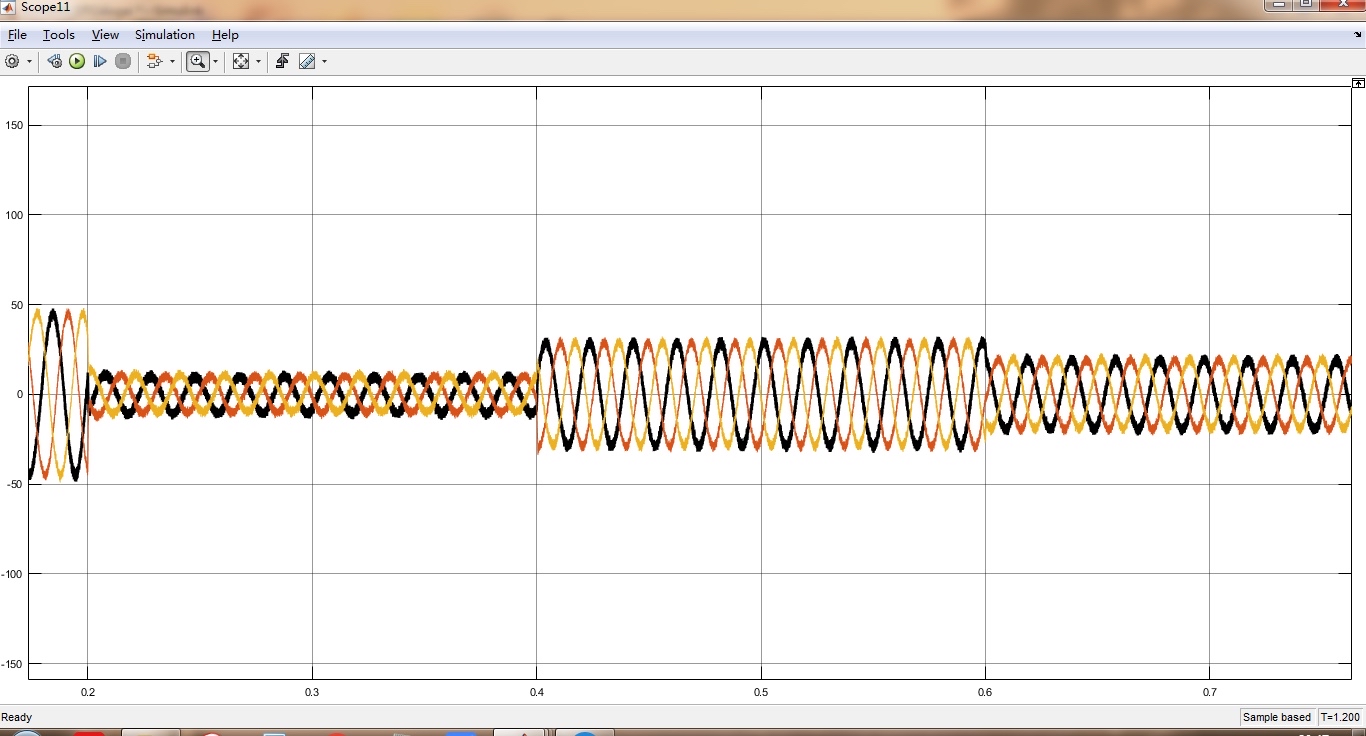
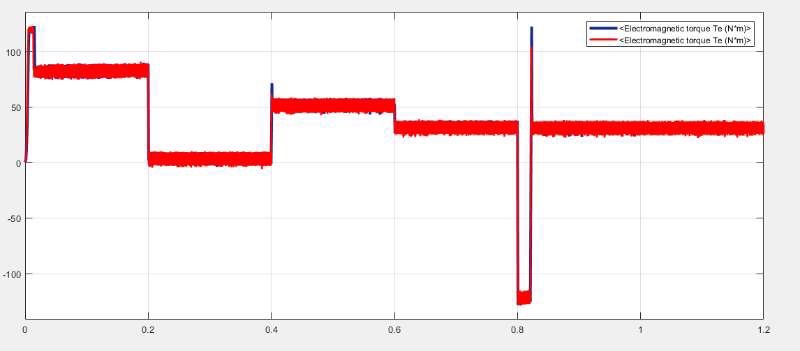
二、仿真模型优势 - 转矩脉动更小
相比于传统DTC控制,SVPWM - DTC控制的一大显著优势就是转矩的脉动更小。从仿真结果的对比图中可以清晰地看到这一点。传统DTC控制由于采用的是滞环比较器直接控制逆变器开关状态,转矩波动范围较大。而SVPWM - DTC通过精确的SVPWM调制和三环PI控制,能够更平滑地调节转矩,使得转矩脉动明显减小。这不仅提高了电机运行的稳定性,也降低了电机运行时产生的噪声和振动。
总之,三相异步电机的SVPWM - DTC控制结合Matlab/Simulink仿真,为我们深入研究和优化电机控制提供了强大的工具和方法。希望本文的介绍能让大家对这一技术有更直观的认识和理解。