A*或跳点搜索算法JPS+多机器人+dwa,有改进,有对比,还有单机器人的。
在机器人路径规划领域,A*和跳点搜索算法JPS+一直是备受瞩目的算法。随着多机器人协同作业需求的增长,如何将这些经典算法应用于多机器人系统,并结合动态窗口算法DWA进行改进,成为了有趣的研究方向。今天咱们就来唠唠这其中的门道。
A*算法:经典中的经典
A*算法可以说是路径规划算法界的明星。它结合了Dijkstra算法的广度优先搜索策略和贪心算法的最佳优先搜索策略,通过一个估值函数f(n)=g(n)+h(n)来寻找最佳路径。其中g(n)是从起点到节点n的实际代价,h(n)是从节点n到目标点的估计代价。
咱们来看段简单的Python代码示例:
python
import heapq
def heuristic(a, b):
return abs(a[0] - b[0]) + abs(a[1] - b[1])
def a_star(graph, start, goal):
open_set = []
heapq.heappush(open_set, (0, start))
came_from = {}
g_score = {node: float('inf') for node in graph.keys()}
g_score[start] = 0
f_score = {node: float('inf') for node in graph.keys()}
f_score[start] = heuristic(start, goal)
while open_set:
_, current = heapq.heappop(open_set)
if current == goal:
path = []
while current in came_from:
path.append(current)
current = came_from[current]
path.append(start)
path.reverse()
return path
for neighbor in graph[current]:
tentative_g_score = g_score[current] + 1
if tentative_g_score < g_score[neighbor]:
came_from[neighbor] = current
g_score[neighbor] = tentative_g_score
f_score[neighbor] = tentative_g_score + heuristic(neighbor, goal)
if neighbor not in [i[1] for i in open_set]:
heapq.heappush(open_set, (f_score[neighbor], neighbor))
return None这里heuristic函数就是在计算h(n),astar**函数则是整个A*算法的核心实现。通过不断从open set中取出f(n)值最小的节点进行扩展,直到找到目标节点。
JPS+算法:优化的跳跃搜索
JPS+算法则是对传统JPS的改进,它通过在搜索过程中识别跳点,避免了对不必要节点的扩展,从而大大提高了搜索效率。在网格地图中,JPS+能够利用网格的结构特性,跳过一些明显不是最优路径组成部分的节点。
python
# 这里仅简单示意JPS+算法搜索方向相关代码
directions = [(0, 1), (1, 1), (1, 0), (1, -1), (0, -1), (-1, -1), (-1, 0), (-1, 1)]
def find_jump_point(map, current, direction, goal):
# 代码省略具体实现,核心是通过方向和地图信息寻找跳点
pass上述代码只是简单示意了JPS+算法中搜索方向相关的内容,实际的跳点查找函数findjumppoint需要根据地图信息、当前节点和搜索方向来确定跳点位置,从而减少搜索空间。
结合DWA的改进
动态窗口算法DWA主要用于局部路径规划,考虑机器人的动力学约束,实时调整机器人的速度和方向。将A*或JPS+与DWA结合,可以让全局路径规划和局部路径规划相互补充。
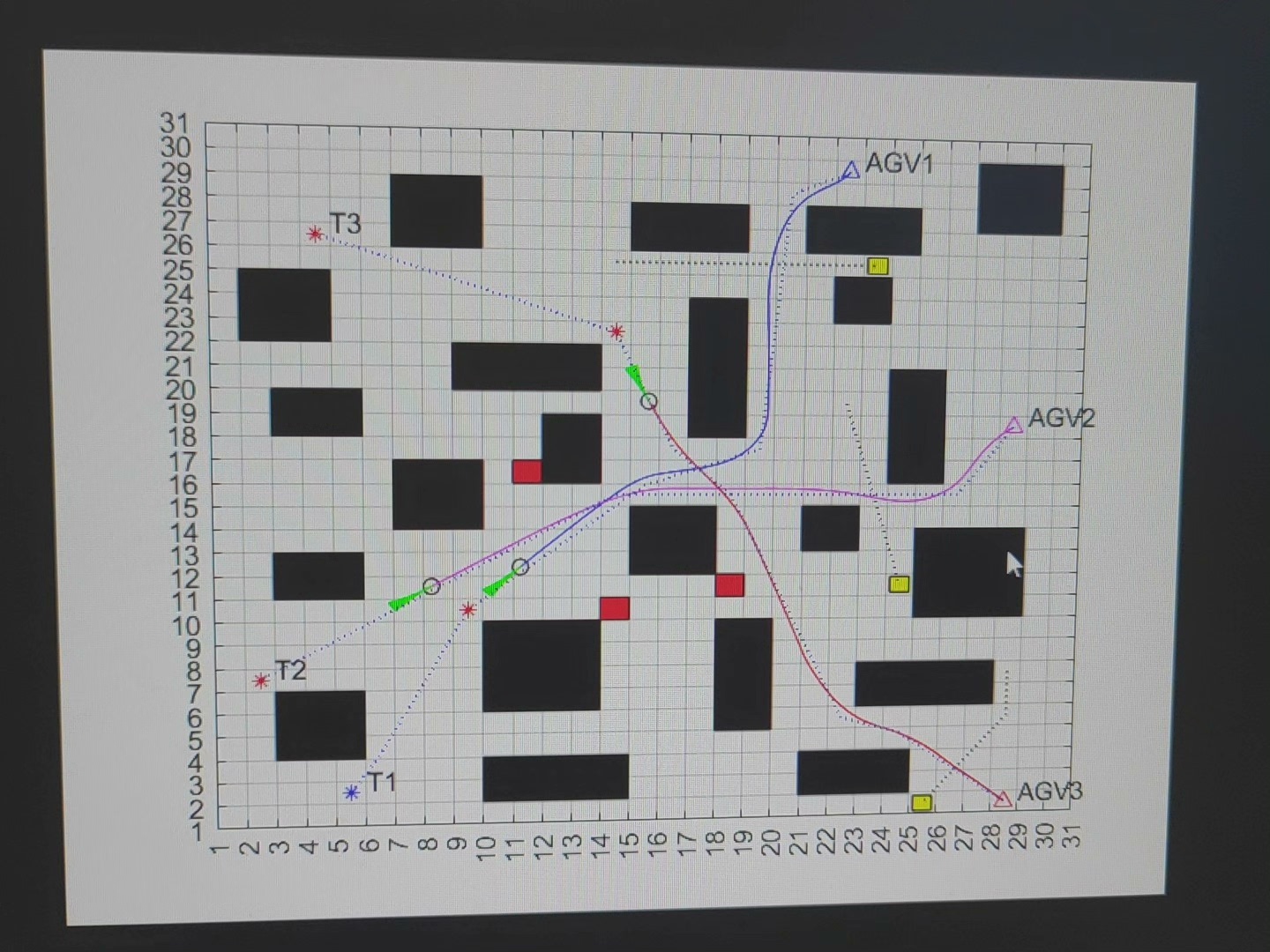
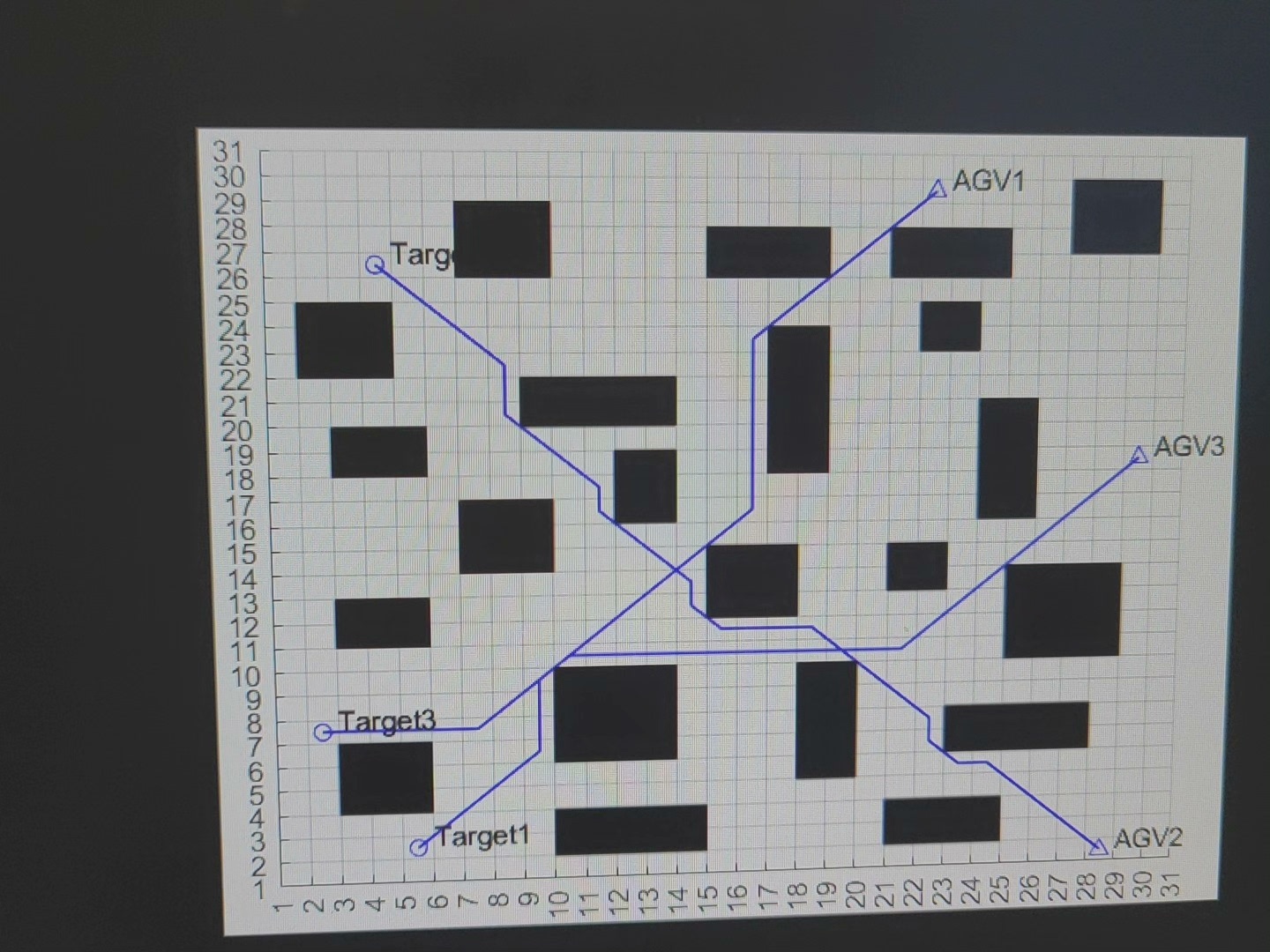
在多机器人场景下,多个机器人共享地图信息。改进的方式可以是让机器人之间相互通信,避免路径冲突。比如,当一个机器人规划好路径后,将路径信息广播给其他机器人,其他机器人在规划路径时避开这些冲突区域。
python
# 多机器人路径冲突避免简单示例
robot_paths = []
def plan_path(robot_id, start, goal, map):
path = a_star(map, start, goal)
for other_path in robot_paths:
# 检查路径是否冲突
if check_conflict(path, other_path):
# 如果冲突,重新规划
path = a_star(map, start, goal, conflict_paths=[other_path])
robot_paths.append(path)
return path
def check_conflict(path1, path2):
# 检查两条路径是否有冲突的代码
pass在单机器人场景下,结合DWA的改进主要体现在对机器人运动过程中实时调整路径。当检测到新的障碍物时,利用A*或JPS+重新规划全局路径,同时DWA根据新的全局路径和当前机器人状态实时调整局部路径。
多机器人与单机器人场景对比
在单机器人场景中,路径规划相对简单,主要考虑地图中的障碍物和机器人自身的运动约束。而多机器人场景则复杂得多,不仅要考虑上述因素,还要处理机器人之间的冲突。
从计算资源上看,单机器人路径规划计算量较小,而多机器人场景下,由于需要机器人间通信和协调,计算资源需求大幅增加。
从算法效率上对比,在相同地图复杂度下,A和JPS+在单机器人场景中效率差异明显,JPS+由于跳点搜索机制通常更快。但在多机器人场景中,由于需要额外处理冲突,算法效率不仅取决于A或JPS+本身,还与冲突处理机制紧密相关。如果冲突频繁,可能会导致算法反复重新规划路径,从而降低整体效率。
总的来说,无论是单机器人还是多机器人场景,结合A*或JPS+与DWA的改进算法都为机器人路径规划提供了更高效、更灵活的解决方案。不断探索这些算法在不同场景下的优化和应用,对于推动机器人技术的发展具有重要意义。