永磁同步电机滑模观测器simulink搭建模型(3种),附参考论文。 模型中有用锁相环或低通滤波器提取电角度和电角速度。
在永磁同步电机(PMSM)的控制领域,滑模观测器(SMO)因其对参数变化和外部干扰具有较强鲁棒性而备受青睐。今天就来聊聊永磁同步电机滑模观测器在Simulink中的三种模型搭建方式,并且会涉及到通过锁相环(PLL)或低通滤波器(LPF)提取电角度和电角速度的内容,还会附上相关参考论文,方便大家进一步深入研究。
一、滑模观测器基本原理
滑模观测器的核心思想是通过构造一个观测器,使得系统状态在滑模面上滑动,从而实现对电机状态的准确估计。以永磁同步电机在α - β坐标系下的电压方程为例:
\[
\begin{cases}
u*{\alpha}=R* {s}i*{\alpha}+L* {s}\frac{di*{\alpha}}{dt}+e*{\alpha}\\
u*{\beta}=R* {s}i*{\beta}+L* {s}\frac{di*{\beta}}{dt}+e*{\beta}
\end{cases}
\]
其中,\(u*{\alpha}\)、\(u* {\beta}\) 是定子电压在α - β坐标系下的分量,\(i*{\alpha}\)、\(i* {\beta}\) 是定子电流在α - β坐标系下的分量,\(R*{s}\) 是定子电阻,\(L* {s}\) 是定子电感,\(e*{\alpha}\)、\(e*{\beta}\) 是反电动势在α - β坐标系下的分量。
滑模观测器通过估计电流来反推反电动势,进而得到电机的转速和位置信息。
二、Simulink模型搭建方式一
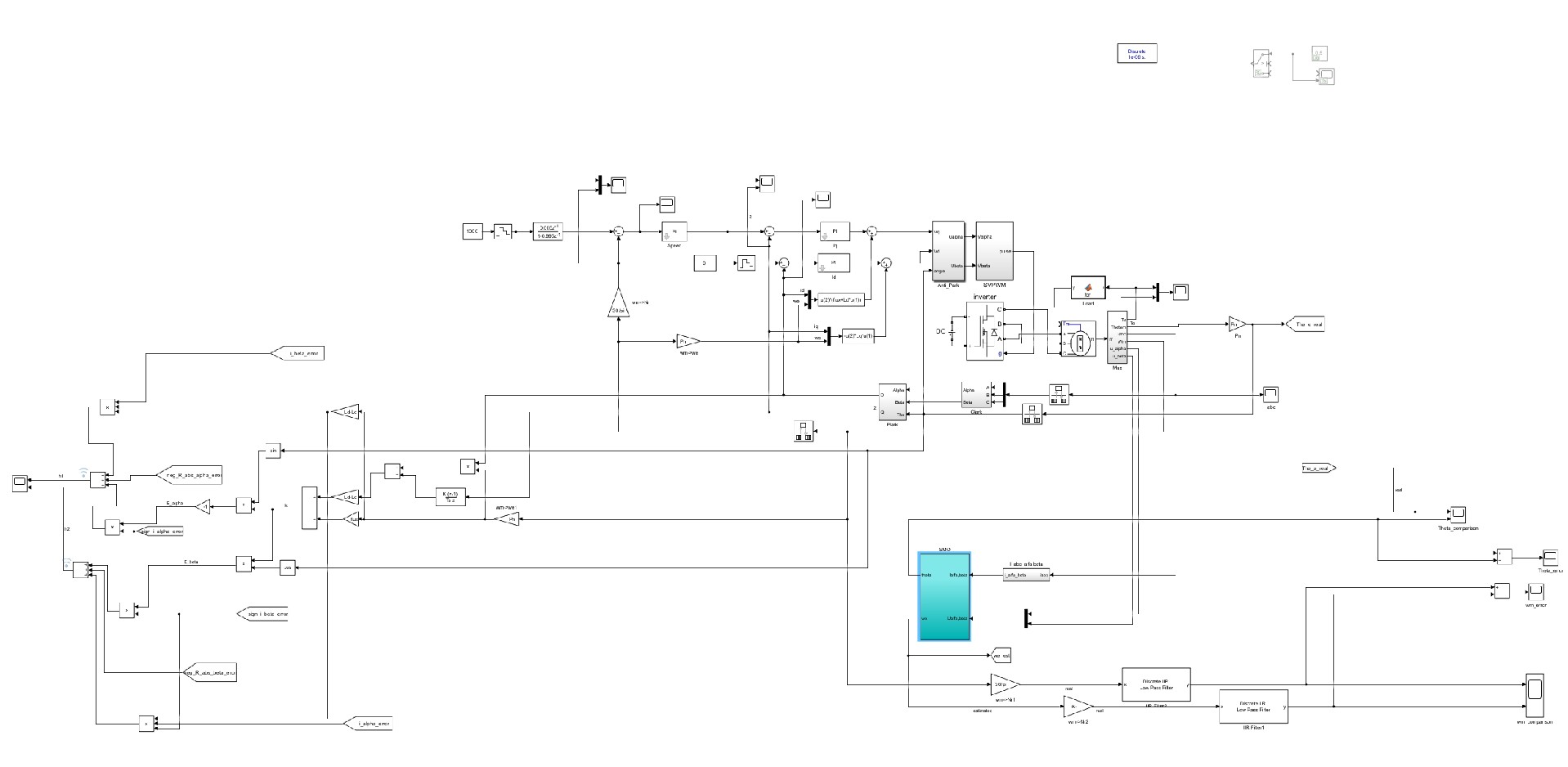
1. 整体架构
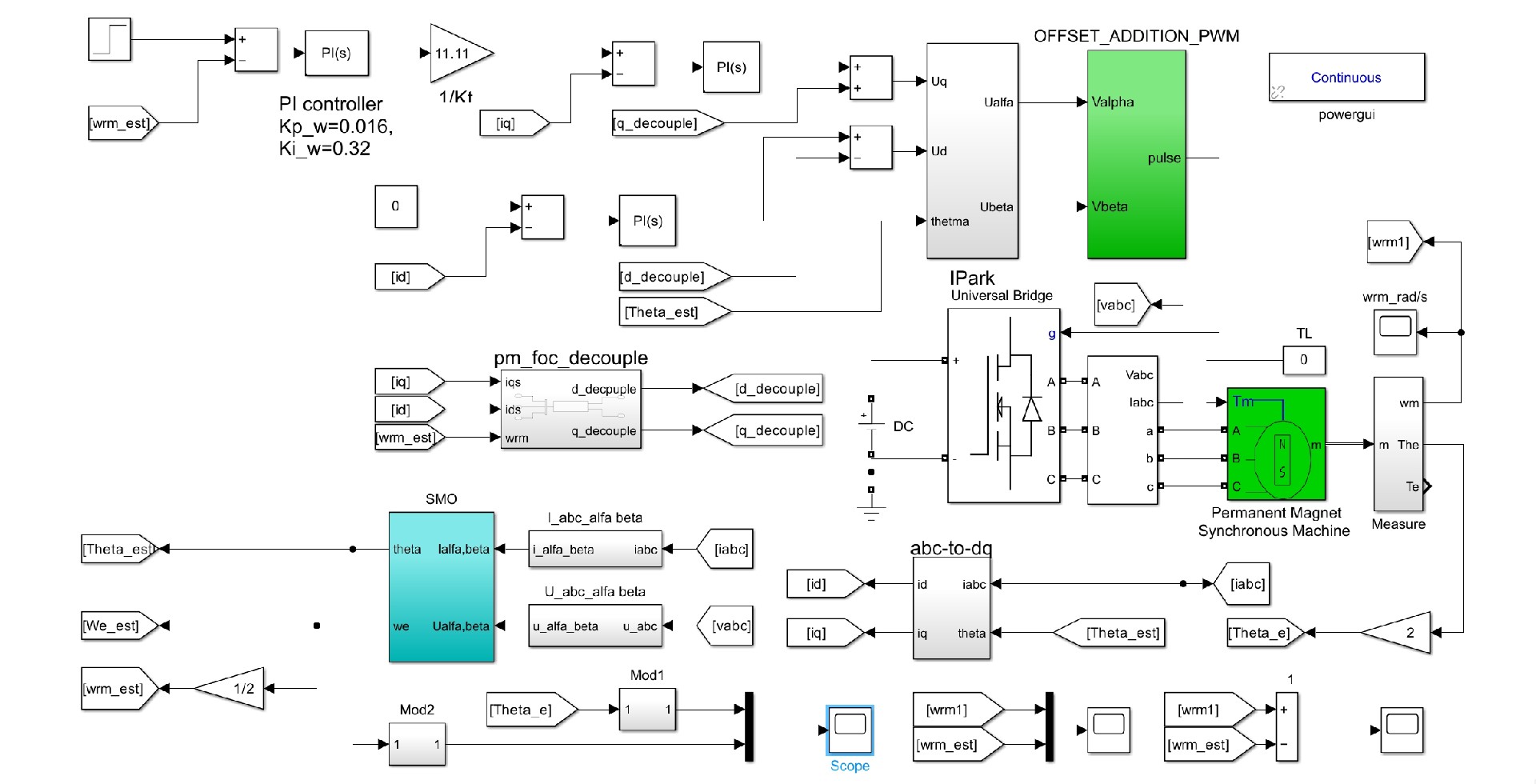
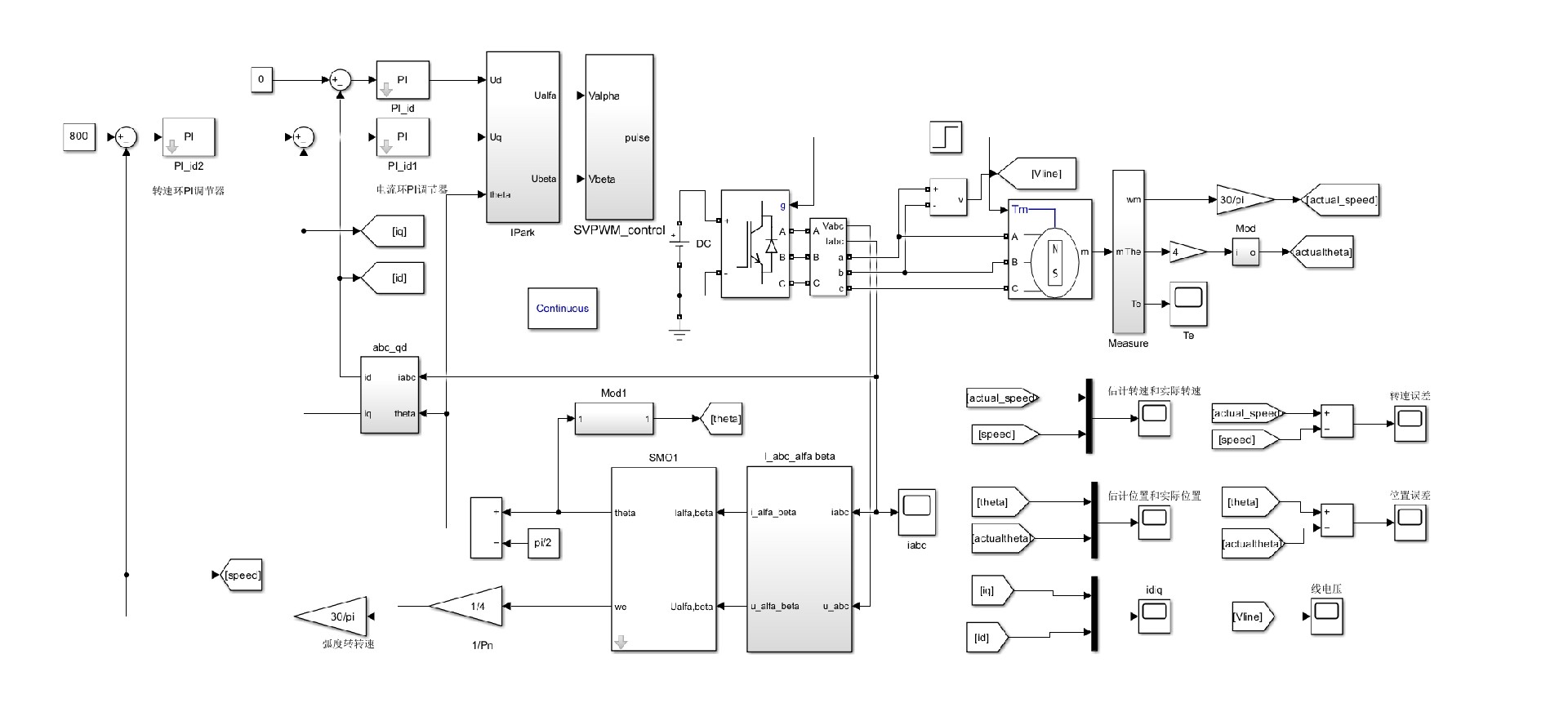
在Simulink中搭建一个基础的永磁同步电机滑模观测器模型。首先创建一个新的Simulink模型文件,然后从Simulink库中拖入所需的模块。
2. 电流观测模块
使用一个电流传感器模块获取电机的实际电流 \(i*{\alpha}\) 和 \(i*{\beta}\)。在滑模观测器模块中,我们通过以下离散化的方程来估计电流:
\[
\hat{i}{\alpha}(k + 1)=\hat{i} {\alpha}(k)+\frac{T*{s}}{L* {s}}u*{\\alpha}(k)-R* {s}\\hat{i}*{\\alpha}(k)-k*{s}sgn(\\hat{e}_{\\alpha}(k))
\]
\[
\hat{i}{\beta}(k + 1)=\hat{i} {\beta}(k)+\frac{T*{s}}{L* {s}}u*{\\beta}(k)-R* {s}\\hat{i}*{\\beta}(k)-k*{s}sgn(\\hat{e}_{\\beta}(k))
\]
这里 \(T*{s}\) 是采样周期,\(k*{s}\) 是滑模增益,\(sgn\) 是符号函数。在Simulink中可以通过一个简单的逻辑判断模块来实现 \(sgn\) 函数:
matlab
function y = sgn(x)
if x > 0
y = 1;
elseif x < 0
y = -1;
else
y = 0;
end
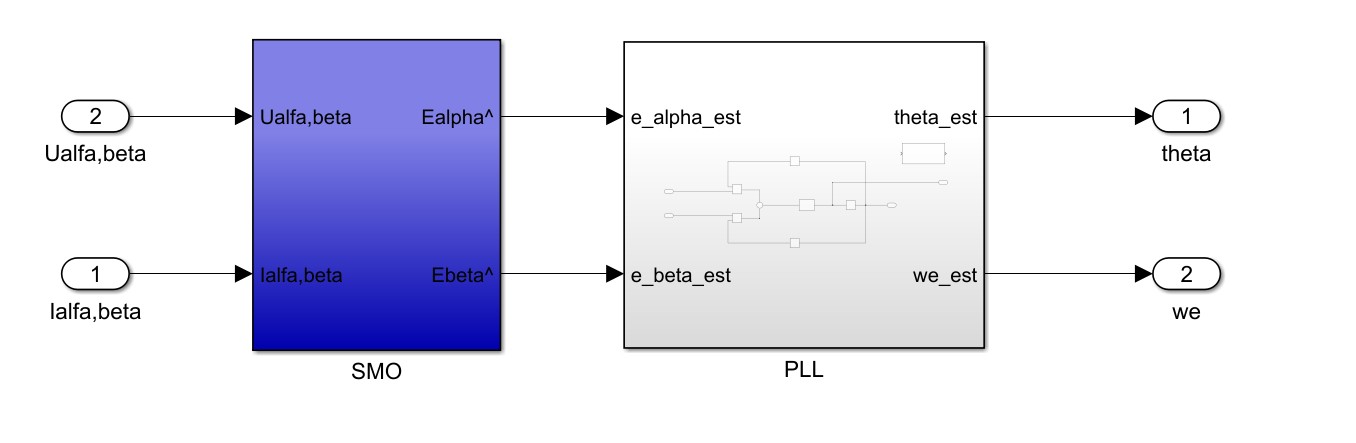
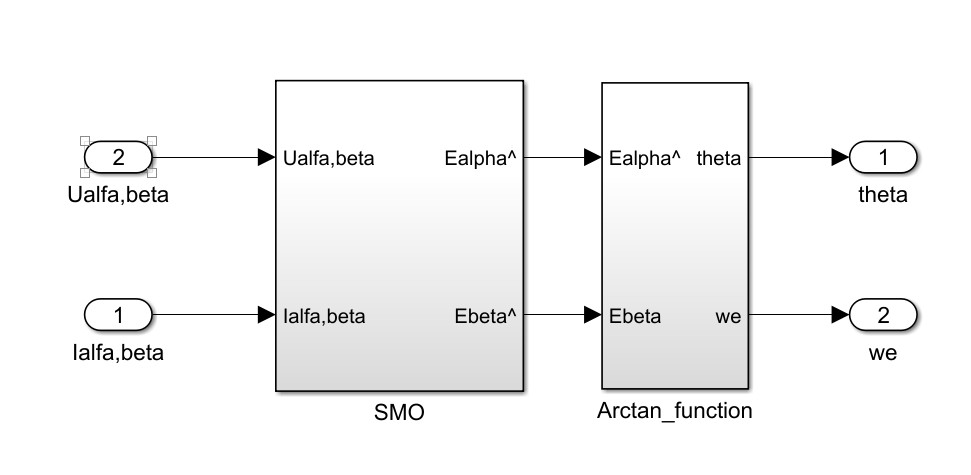
end3. 反电动势估计与电角度提取
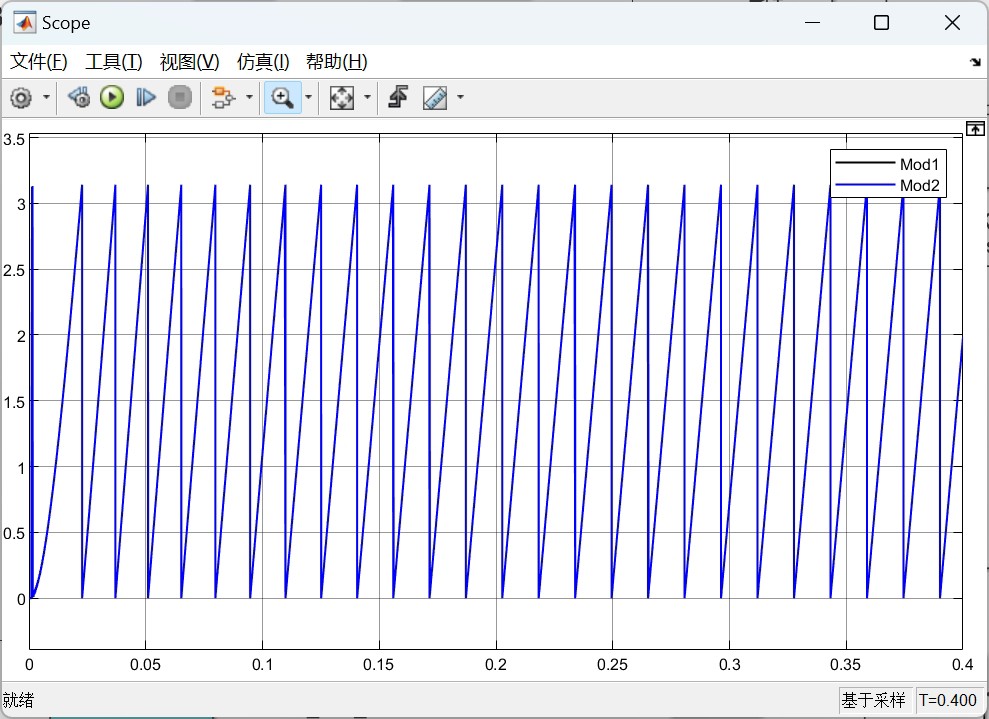
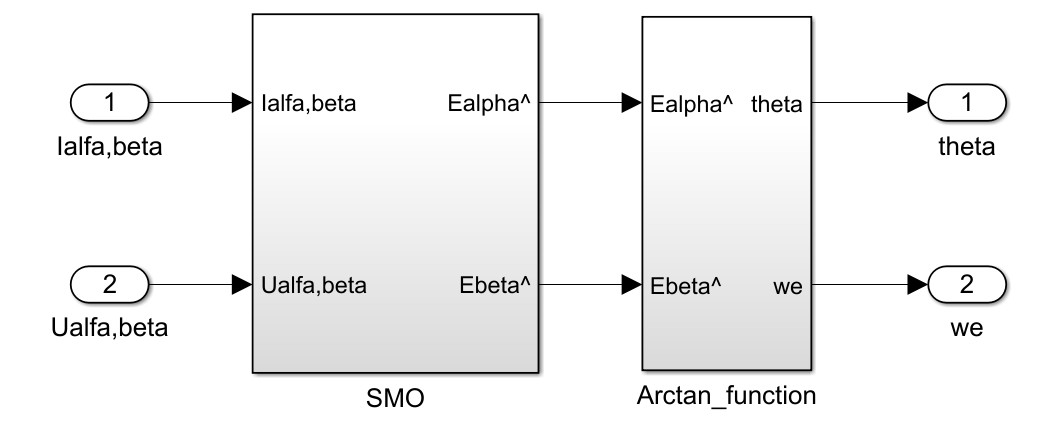
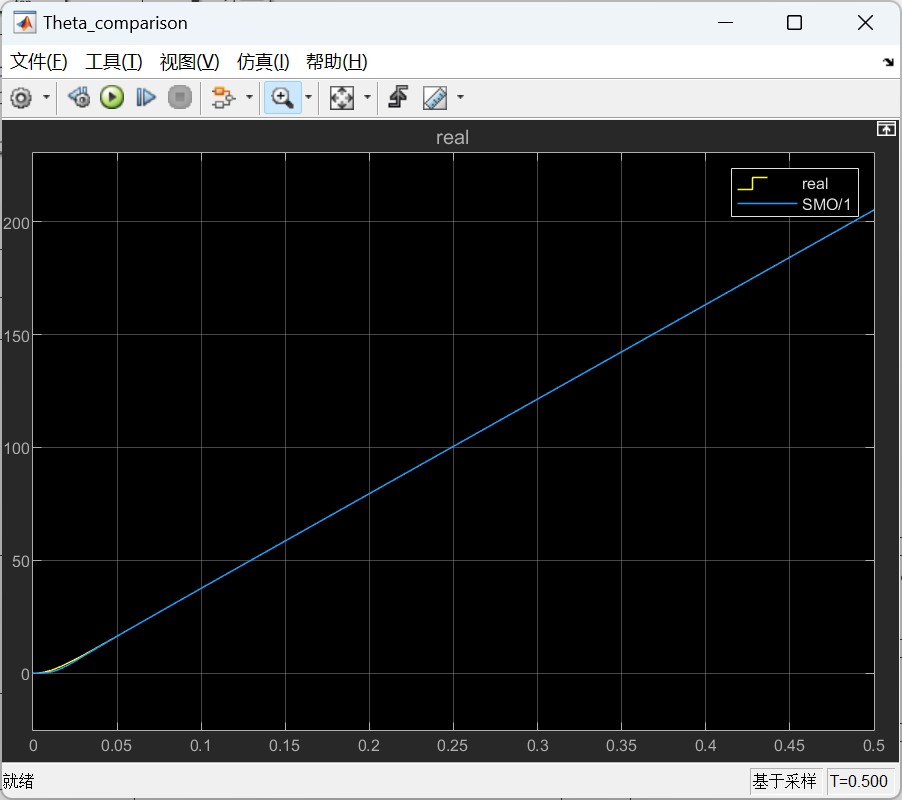
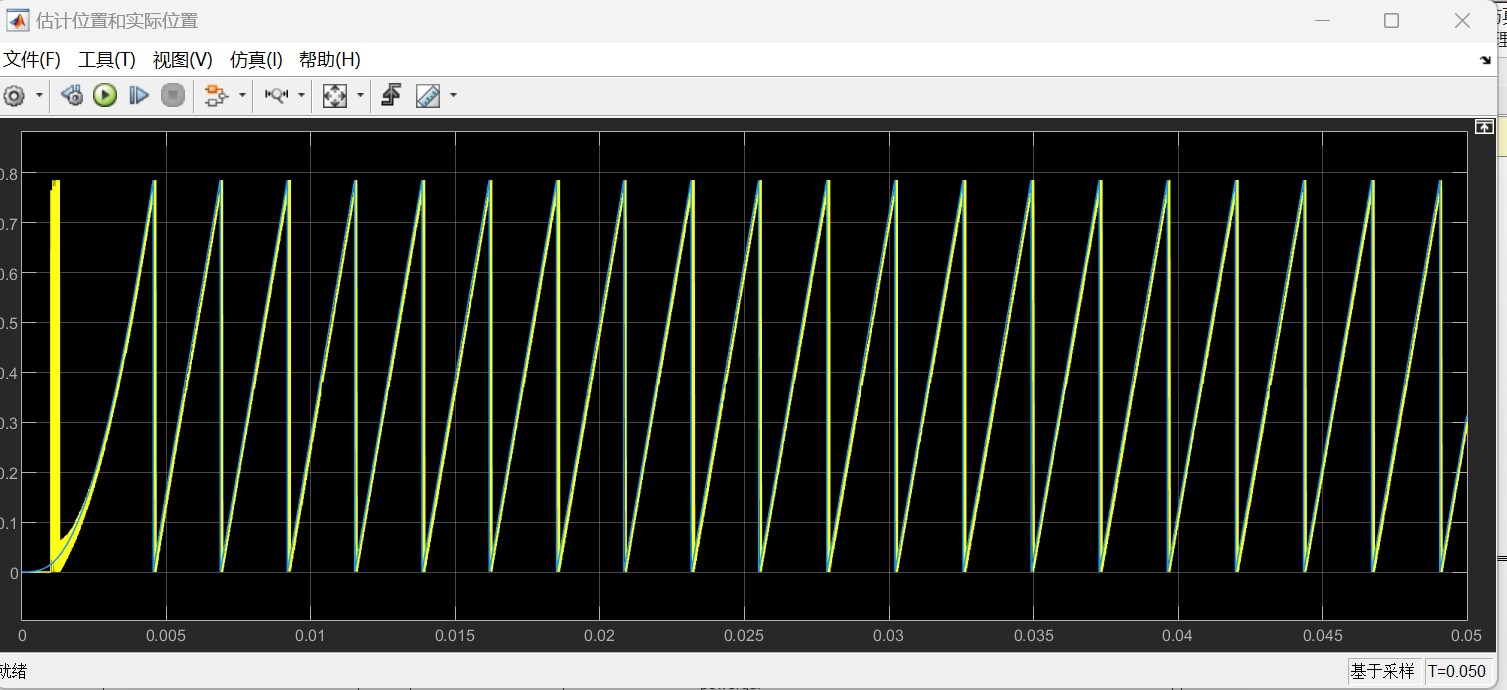
通过估计的电流得到反电动势 \(\hat{e}{\alpha}\) 和 \(\hat{e}{\beta}\),然后利用低通滤波器对反电动势进行处理,滤除高频噪声。低通滤波器在Simulink中可以直接使用Filter Design模块进行设计。经过低通滤波后的反电动势信号,再通过锁相环模块来提取电角度 \(\theta\) 和电角速度 \(\omega\)。锁相环模块在Simulink中有现成的PLL模块可供使用,它会根据输入的信号自动调整相位和频率,输出我们需要的电角度和电角速度信息。
三、Simulink模型搭建方式二
1. 改进的滑模面设计
在这种方式中,我们对滑模面进行改进。传统的滑模面一般是基于电流误差构建,这里我们采用一种结合电流和反电动势信息的滑模面:
\[
s = \lambda*{1}e* {i}+\lambda*{2}\int e*{e}dt
\]
其中 \(e*{i}\) 是电流误差,\(e* {e}\) 是反电动势误差,\(\lambda*{1}\) 和 \(\lambda*{2}\) 是滑模面参数。这种滑模面能够使系统更快地收敛到滑模状态,提高观测精度。
2. 模型搭建
在Simulink中,我们首先根据改进的滑模面公式搭建滑模面计算模块。这里可以使用积分器模块来实现积分运算。然后在滑模观测器模块中,基于新的滑模面来更新电流估计和反电动势估计。
matlab
% 计算滑模面
function s = calculate_surface(i_est, i_real, e_est, e_real, lambda1, lambda2)
ei = i_est - i_real;
ee = e_est - e_real;
persistent integral_ee
if isempty(integral_ee)
integral_ee = 0;
end
integral_ee = integral_ee + ee * Ts;
s = lambda1 * ei + lambda2 * integral_ee;
end同样,后续还是通过低通滤波器和锁相环来提取电角度和电角速度。
四、Simulink模型搭建方式三
1. 自适应滑模增益
这种方式重点在于滑模增益的自适应调整。传统的固定滑模增益在系统运行过程中可能无法兼顾快速收敛和减小抖振的需求。我们设计一个自适应滑模增益算法:
\[
k*{s}(k)=k* {s0}+k*{1}\left|e*{i}(k)\right|
\]
其中 \(k*{s0}\) 是初始滑模增益,\(k*{1}\) 是增益调整系数,\(e_{i}(k)\) 是当前时刻的电流误差。
2. 模型实现
在Simulink中,通过一个简单的计算模块来实现自适应滑模增益的计算。根据当前的电流误差实时调整滑模增益,然后在滑模观测器模块中使用这个自适应增益来进行电流和反电动势的估计。
matlab
% 自适应滑模增益计算
function ks = adaptive_ks(ks0, k1, ei)
ks = ks0 + k1 * abs(ei);
end最后依旧利用低通滤波器和锁相环来完成电角度和电角速度的提取。
五、参考论文
- 《基于滑模观测器的永磁同步电机无传感器控制研究》 - 详细阐述了滑模观测器在永磁同步电机无传感器控制中的理论与实现。
- 《永磁同步电机滑模观测器的改进设计与仿真》 - 对滑模观测器的改进方法进行了深入探讨,包括滑模面设计和滑模增益调整等内容,与本文的部分模型搭建思路相契合。
通过以上三种在Simulink中搭建永磁同步电机滑模观测器模型的方式,并且利用锁相环和低通滤波器提取关键的电角度和电角速度信息,希望能为大家在永磁同步电机控制研究方面提供一些帮助和启发。大家可以根据实际需求选择合适的模型搭建方式,进一步优化电机的控制性能。